") CAN-FD協(xié)議你了解多少 ?
CAN-FD協(xié)議你了解多少 ?
背景:隨著工業(yè)的發(fā)展,工業(yè)總線上的數(shù)據(jù)量越來(lái)越多,這使得CAN總線的逐漸達(dá)到負(fù)荷極限,這就需要改進(jìn)原有的總線來(lái)提高總線傳輸速率。在這樣的情況下,2011年,Bosch和汽車(chē)制造商合作之下,改進(jìn)了CAN,于是CAN-FD便在這樣的背景下誕生了。
Ⅰ什么是CAN-FD?
先了解下什么是CAN?
CAN:Controller area network,即控制器區(qū)域(局域)網(wǎng)絡(luò)。CAN總線是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一,目前已經(jīng)成為汽車(chē)計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線。
CAN-FD:英文為CAN with Flexible Data-Rate,翻譯為【可變速率的CAN】。在經(jīng)典CAN的基礎(chǔ)上增加傳輸速率,數(shù)據(jù)域可傳輸64Byte,也就是可變速的功能,簡(jiǎn)單的來(lái)說(shuō)就是CAN的升級(jí)版。
CAN-FD它繼承了 CAN 總線的主要特性,提高了 CAN 總線的網(wǎng)絡(luò)通信帶寬,改善了錯(cuò)誤幀漏檢率,同時(shí)可以保持網(wǎng)絡(luò)系統(tǒng)大部分軟硬件特別是物理層不變。
ⅡCAN-FD與CAN主要區(qū)別
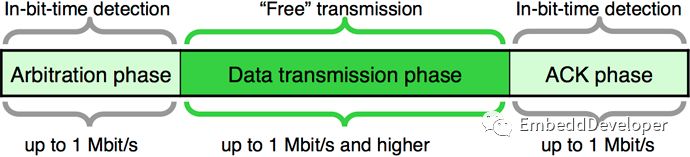
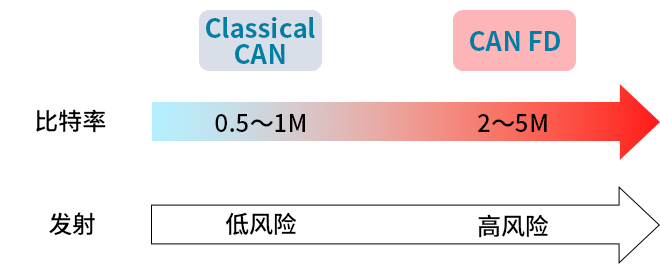
CAN FD 采用了兩種方式來(lái)提高通信的效率:一種方式為縮短位時(shí)間提高位速率;另一種方式為加長(zhǎng)數(shù)據(jù)場(chǎng)長(zhǎng)度減少報(bào)文數(shù)量降低總線負(fù)載率。在 CRC 校驗(yàn)段采用了三種多項(xiàng)式來(lái)保證高速通訊下的數(shù)據(jù)可靠性。
CAN-FD和CAN主要的區(qū)別有三點(diǎn):
1.可變速率
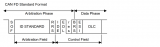
從控制場(chǎng)中的 BRS 位到 ACK 場(chǎng)之前(含 CRC 分界符)為可變速率,其余部分為原 CAN總線用的速率。兩種速率各有一套位時(shí)間定義寄存器,它們除了采用不同的位時(shí)間單位 TQ 外,位時(shí)間各段的分配比例也可不同。
2.數(shù)據(jù)域Payload長(zhǎng)度
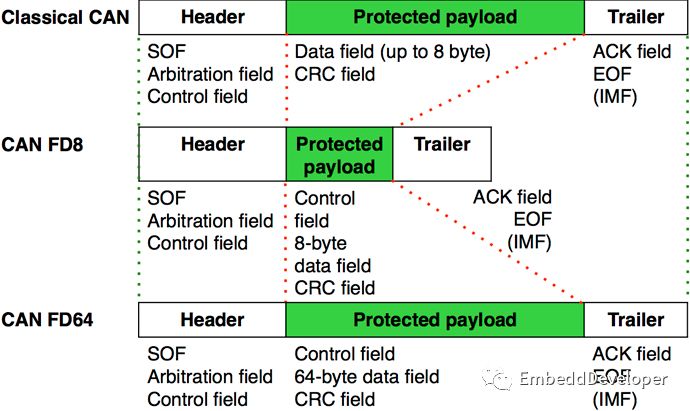
CAN FD 對(duì)數(shù)據(jù)場(chǎng)的長(zhǎng)度作了很大的擴(kuò)充, DLC 最大支持 64 個(gè)字節(jié),在 DLC 小于等于 8 時(shí)與原 CAN 總線是一樣的,大于 8 時(shí)則有一個(gè)非線性的增長(zhǎng),最大的數(shù)據(jù)場(chǎng)長(zhǎng)度可達(dá) 64 字節(jié)。
3.CRC 校驗(yàn)場(chǎng)
在 CAN-FD 協(xié)議標(biāo)準(zhǔn)化的過(guò)程中,通信的可靠性也得到了提高。由于 DLCs 的長(zhǎng)度不同,在 DLC 大于 8 個(gè)字節(jié)時(shí), CAN FD 選擇了兩種新的 BCH 型 CRC 多項(xiàng)式。
ⅢCAN-FD與CAN兼容性
盡管CAN-FD繼承了絕大部分傳統(tǒng)CAN的特性,但是從傳統(tǒng)CAN到CANFD的升級(jí),其實(shí)我們?nèi)孕枰龊芏嗟墓ぷ鳌?/p>
1.硬件
我們需要選取支持 CAN-FD 的 CAN 控制器和收發(fā)器,還要選取新的網(wǎng)絡(luò)調(diào)試和監(jiān)測(cè)工具。
2.網(wǎng)絡(luò)兼容性
傳統(tǒng) CAN 網(wǎng)段的部分節(jié)點(diǎn)需要升級(jí)到 CANFD 的情況要特別注意, 由于幀格式不一致的原因, CANFD 節(jié)點(diǎn)可以正常收發(fā)傳統(tǒng) CAN 節(jié)點(diǎn)報(bào)文,但是傳統(tǒng) CAN 節(jié)點(diǎn)不能正常收發(fā) CANFD 節(jié)點(diǎn)的報(bào)文。
ⅣCiA官網(wǎng)信息
由于我們公司需要使用CAN總線,在產(chǎn)品上裸跑過(guò)CAN(添加自己的協(xié)議:幀頭、長(zhǎng)度、數(shù)據(jù)域、幀尾、校驗(yàn)等),也在產(chǎn)品上跑過(guò)CANOpen協(xié)議,一直也走在CAN路上,也一直在學(xué)習(xí)(協(xié)議里面的內(nèi)容其實(shí)挺多的),所以也比較關(guān)注CAN的發(fā)展。
我想說(shuō)的重點(diǎn)是:CAN在今后的工業(yè)應(yīng)用中會(huì)越來(lái)越常見(jiàn)。所以,如果你還沒(méi)有了解過(guò)CAN,那么你應(yīng)該學(xué)習(xí)CAN相關(guān)的知識(shí)了。
1.CAN-FD的路演
參考網(wǎng)址:
https://www.can-cia.org/news/cia-in-action/view/can-fd-roadshow-china/2018/4/20
在中國(guó),5月中下旬,有如下幾個(gè)城市會(huì)進(jìn)行路演。
宣傳主要內(nèi)容:
2.關(guān)于CAN-FD的學(xué)習(xí)資料
參考網(wǎng)址:
https://www.can-cia.org/can-knowledge/can/can-fd
獲取信息,建議都在官網(wǎng)獲取,原因很簡(jiǎn)單:權(quán)威。
推薦閱讀:
一種值得嵌入式開(kāi)發(fā)人員學(xué)習(xí)的總線 --- CAN-Bus
選擇適合自己的開(kāi)源RTOS
-
CAN
+關(guān)注
關(guān)注
57文章
2720瀏覽量
463399 -
HBRS
+關(guān)注
關(guān)注
0文章
2瀏覽量
10135 -
BOSCH
+關(guān)注
關(guān)注
14文章
52瀏覽量
54257
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【CAN總線知識(shí)】深度解析CAN-FD與CAN協(xié)議的差別

CAN FD與傳統(tǒng)CAN的區(qū)別是什么

CAN-FD:CAN總線網(wǎng)絡(luò)第二章
CAN/CAN FD/CAN XL三大總線協(xié)議解讀,是逐步替代關(guān)系嗎?
MSPM0G310x-Q1汽車(chē)類(lèi)具有CAN-FD接口的混合信號(hào)微控制器數(shù)據(jù)表

MSPM0G350x-Q1具有CAN-FD接口的汽車(chē)類(lèi)混合信號(hào)微控制器數(shù)據(jù)表
MSPM0G310x具有CAN-FD接口的混合信號(hào)微控制器數(shù)據(jù)表
MSPM0G350x具有CAN-FD接口的混合信號(hào)微控制器數(shù)據(jù)表
CAN FD版本震撼發(fā)布!全新PCAN-GPS FD模塊,重新定義智能連接!
如何使用DSLogic分析CAN/CAN-FD 信號(hào)?

使用MM32F0160 FlexCAN-FD接口實(shí)現(xiàn)CAN FD通信
汽車(chē)ESD保護(hù)元件的問(wèn)題解答





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論