 波士頓動力機器人的動態平衡專利揭秘
波士頓動力機器人的動態平衡專利揭秘
波士頓動力通過操作機器人的四肢部位讓其本身在表面上處于動態平衡,通過機器人可以動態的控制腿,使得反作用力允許機器人保持支撐整個身體的平衡,更加接近于真人的實際動作!
集微網消息,近日,一則波士頓動力機器人的對比視頻在微博上流傳。該視頻畫面分為兩部分,左邊是10年前波士頓動力機器人訓練的畫面,右邊是10年后波士頓動力機器人訓練的畫面。
10年前的波士頓動力機器人還需要通過懸掛繩索來在傳送帶上行走,而且還步履蹣跚。10年后的波士頓機器人已經不需要輔助設備就可以輕松自如地完成各種即使是普通人也難以完成的精細活動和大肢體動作,無論是下腰、打滾、倒立乃至前空翻、后空翻都非常的穩妥。
波士頓動力在機器人領域取得了非凡的成就,而可以使得機器人如此靈活甚至在某些程度上超越了大部分普通人的原因,離不開波士頓動力為機器人設計的動態平衡系統,尤其是對于二足機器人而言,良好的動態平衡系統更是為機器人的整體可操作性發揮了重要的作用!
就在17年12月6日,波士頓動力申請了一項名為“使用動態平衡在有腿機器人上的整體操縱”的發明專利(申請號:201780075045.7),申請人為波士頓動力公司。
根據目前公開的專利資料,讓我們一起來看看這項動態平衡專利吧。
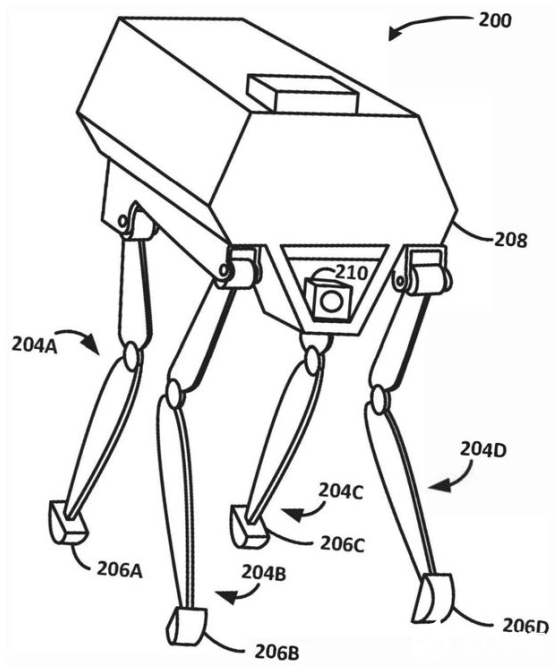
如上圖,首先要介紹的是一種四足機器人結構,顧名思義,從示意圖中可以看到它有四條仿生足206A、206B、206C及206D,208部位為一個可以用來承載物體的載物臺,因此可以推斷該四足機器人應該是用于搬運貨物。
四條“腿”使得機器人可以相對于其環境運動,并且可以擁有一定的自由運動能力,具體而言,“腿”可以使得機器人根據不同步態的力學特點以各種速度行進,例如通過平地、斜坡、坑洼地等多種不同的環境狀態,同時可以采用不同的速度例如緩慢、平穩、加速等多種不同的形態。
除了引人注目的四條“大長腿”以外,該機器人還包括機械部件110、傳感器112、電源115、電部件116以及控制系統118,這些組件只要是用于機器人識別周圍的環境,例如通過圖像傳感器、攝像頭、LIDAR或者紅外傳感器等,而控制系統將通過控制電機來控制機器人的運動。我們知道,機器人有一個很重要的問題就是保持其運動穩定性,因此就需要利用控制系統中的控制算法來對于機器人的運動進行有效的控制。
由于四足機器人本身在不運動時通過四個支點就可以保持平穩,而二足機器人要完成穩定的行走、運動就相對困難許多。
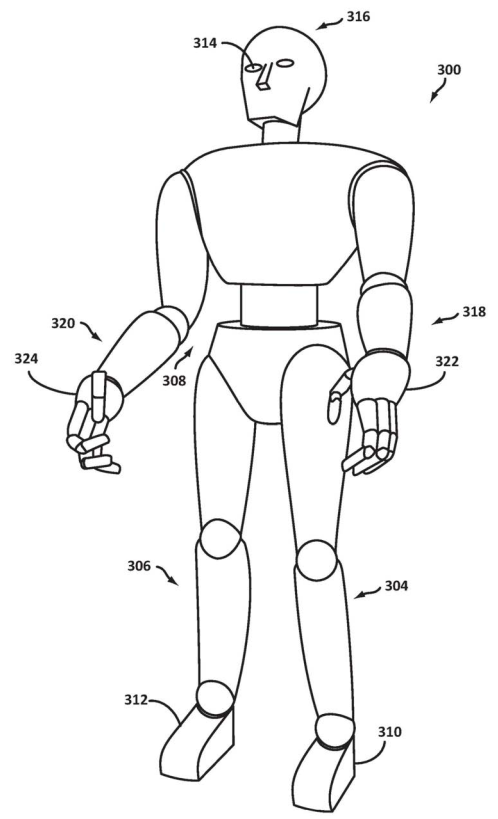
如上圖為一種兩足機器人的示意結構,和四足機器人較為類似的是,二足機器人也具有機械部件110、傳感器112、電源114、電部位116以及控制系統等。
不過二足機器人只有和本體連接的兩條“腿”304和306,每一條腿可以包括多個構件,其通過關節連接且可以通過這些關節部位進行靈活的運動。每一條腿也可以包括各自的腳310和312,擁有這些類似于人體結構的部位,雙足機器人就可以完成行走甚至是跑步等動作。同樣這些動作離不開視覺傳感器例如攝像頭、紅外傳感器、物體傳感器以及距離傳感器等,同時在精準而魯棒的控制系統下才能夠完成這些動作。
在不同的場景下,二足機器人要比四足機器人能夠發揮更大的作用,具體而言表現在能夠適應更多的不同的環境場合,例如爬樓梯、面對復雜的地形,此時四足機器人就難以發揮其優勢而變得寸步難行,而二足機器人則可以在這些方面模擬人的運動從而輕松的面對這些場景。
接下來我們具體來看看二足機器人是如何保持其自身的平衡以及完成運動的吧。
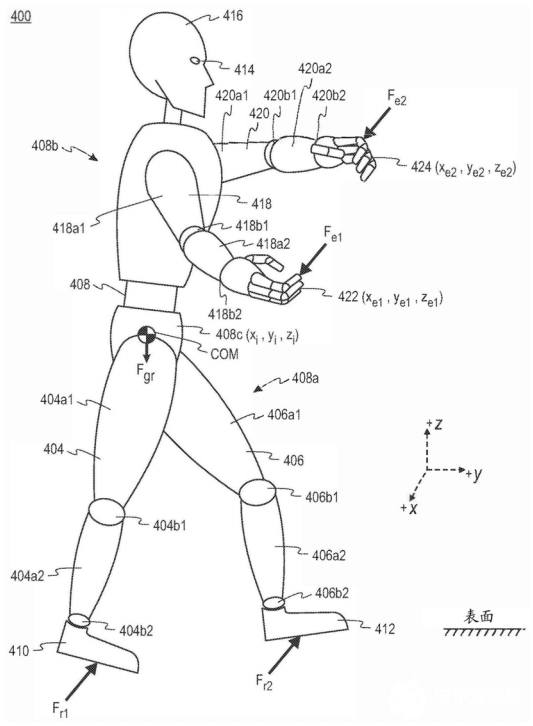
如上圖所示為針對整體操作而采用動態平衡的二足機器人,其包括下本體部分408a、上本體部分408b和中間本體部分408c,下本體部分和上本體部分通過中間本體部分相連接。下本體部分包括從中間本體部分大致向下延伸到表面的兩條腿404和406,腿包括構件404a1-a2、406a1-a2和關節404b1-b2、406b1-b2。
上本體部分包括各自的臂膀418、420的端部上的末端結構422、424,臂可以從上本體部分向外延伸至末端結構,每一個臂也同樣包括多個關節以及可以通過這些關節進行多自由度的運動。
而實現二足機器人的整體平衡則需要下本體控制系統、上本體控制系統和主控系統三個系統之間的協調,控制系統從每一個傳感器中收集傳感器數據,通過這些數據來分析機器人目前所處運動狀態以及將要進行何種操作,例如抬起左腳或者邁出右腿。
而為了實現用于腳的期望位置和用力程度,下本體控制系統將通過反向運動解算器來確定各自腿部的取向和相應關節位置,這里的反向運動解算器,是指使用機器人的運動學方程來確定腿部或者上肢的參數,以便于可以確定落腳點以及手臂的精準運動。同時為了實現落腳的精準,上本體控制系統也可以采用反向運動解算器以確定兩條臂膀的構件的取向和關節的運動位置。
最后,我們來看看控制二足機器人保持平衡的整體方法。
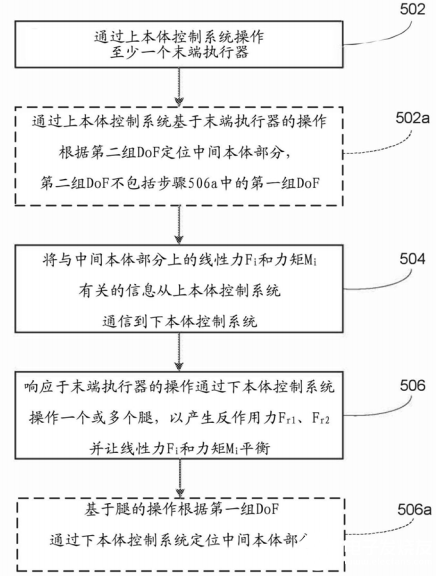
如上圖所示為針對整體操作而采用了動態平衡的操作機器人的方法,首先,上本體控制系統417b操作末端部位422、424,末端部位基于通過上本體控制系統進行的操作而經歷末端部位受力Fe1、Fe2,中間本體部分408c基于末端部位受力經歷第一中間本體線性力fi。
其次,上本體控制系統將與第一中間本體線性力fi和第一中間本體力矩Mi有關的信息通信到下本體控制系統,下本體控制系統響應于可動末端部位的操作而操作腿部的運動。
最后,主控制器417c可確定如果上本體控制系統試圖讓末端部位運動到期望位置時,是否可通過腳的當前位置保持平衡,如平衡不能被保持,則主控制器可對下本體控制系統發出信號,以讓腳運動到新的位置,以便于達到系統的整體平衡。
以上就是波士頓動力的機器人動態平衡操作方法,通過操作機器人的四肢部位讓其本身在表面上處于動態平衡,通過機器人可以動態的控制腿,使得反作用力允許機器人保持支撐整個身體的平衡,更加接近于真人的實際動作!
-
機器人
+關注
關注
210文章
28204瀏覽量
206520 -
波士頓動力
+關注
關注
3文章
176瀏覽量
13099
發布評論請先 登錄
相關推薦
小鵬最新人形機器人!首發自研芯片,模特身材加持,已進廠打螺絲

Atlas轉型電驅,純電+AI正在加速通用人形機器人落地

【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
軟通動力與智元機器人攜手亮相世界機器人大會

埃斯頓4.5億增資子公司,加速機器人產業布局
直線電機生產廠家談人形機器人迎來新奇點

波士頓動力人形機器人Atlas電動版亮相:前沿技術迎來新時代

人形機器人未來面臨的挑戰與爭議
所有操作層都接入AI,Menteebot給人形機器人發展帶來新思路
波士頓動力公司推出電動版Atlas機器人,展現卓越靈活性與敏捷性






 工商網監
工商網監
評論