") 數(shù)控機床的作業(yè)原理
數(shù)控機床的作業(yè)原理
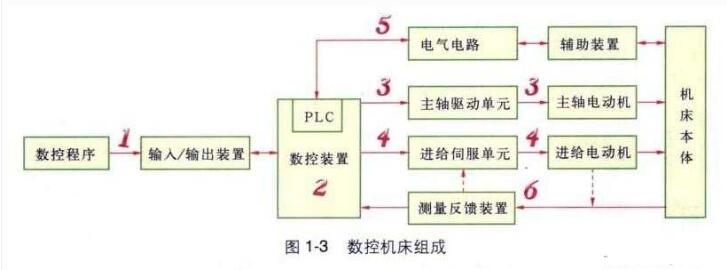
數(shù)控機床的作業(yè)進程如下:
(1)數(shù)控體系通過輸入/輸出設(shè)備來預(yù)讀取數(shù)控程序,并將數(shù)控程序中的指令代碼進行二進制代碼改換,并存人數(shù)控設(shè)備。
(2)數(shù)控機床中除有軌道及定位操控功用外,還要有機床的邏輯動作操控功用,這既央求在機床的電氣操控中既稀有字操控體系NC又有邏輯操控體系plc,二者之間通過紛歧樣的數(shù)據(jù)區(qū)進行信號和數(shù)據(jù)的溝通。所以從功用視點來說,數(shù)控設(shè)備包含這兩大大都,而且二者操控計劃紛歧樣。NC操控進給運動和主軸翻滾,PLC用于數(shù)控機床的外圍輔佐電氣的操控。
(3)對應(yīng)數(shù)控機床主軸電動機的操控設(shè)備,稱為主軸驅(qū)動單元。其接納來自救控設(shè)備宣告的速度指令來操控主軸電動機的轉(zhuǎn)速、啟停和轉(zhuǎn)向。
(4)進給伺服單元即是指進給伺服驅(qū)動器,其承受數(shù)控設(shè)備的速度或方位指令。進繪伺服電動機繞組電流的頻串和巨細,使伺服電動機轉(zhuǎn)子的轉(zhuǎn)速或轉(zhuǎn)角挨近速度或疽,并通過查看伺服電動機的編碼器取得伺服電動機轉(zhuǎn)子或轉(zhuǎn)角實習(xí)值與指令值的過失,進給驅(qū)動單元不斷調(diào)整流過伺服電動機繞組電流的頻率和巨細,使得伺服電動機轉(zhuǎn)子轉(zhuǎn)速或轉(zhuǎn)角實習(xí)值與指令值的過失操控在央求的計劃內(nèi)。
(5)PLC的操控信號通過電氣電路驅(qū)動輔佐設(shè)備的實施元件作業(yè)。電氣電路包含強電電路和弱電電路,PLC的操控信號通過由弱電電路中的繼電器或改換電路成為能聯(lián)接到強電電路的信號,再由強電回路驅(qū)動輔佐設(shè)備實施元件作業(yè),比照如刀庫、換刀安排、冷卻液等的作業(yè)進行操控。
(6)此處的閉環(huán)體系有兩種辦法,一種是速度環(huán),一種是方位環(huán)。速度環(huán)由測速設(shè)備和速度操控單元構(gòu)成。方位環(huán)由方位查看單元和伺服單元等構(gòu)成。
-
數(shù)控機床
+關(guān)注
關(guān)注
19文章
775瀏覽量
46288
發(fā)布評論請先 登錄
相關(guān)推薦
微型導(dǎo)軌如何提升數(shù)控機床的穩(wěn)定性?

數(shù)控裝置是數(shù)控機床什么的中心
簡述數(shù)控機床對結(jié)構(gòu)與性能的要求
數(shù)控機床的優(yōu)點和缺點是什么呢?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論