 基于PWM整流器仿真模型對直流側電容取值進行分析研究
基于PWM整流器仿真模型對直流側電容取值進行分析研究
隨著用電設備的諧波標準要求越來越嚴格,PWM整流器的應用日益廣泛。在PWM整流器(VSR)的控制中,廣泛采用在同步旋轉坐標系下的直接電流控制方法和雙閉環控制結構,其中電壓外環用于控制整流器的輸出電壓,電流內環實現網側電流的波形和相位控制。
按滿足VSR直流側電壓跟隨性和抗擾性指標分別確定了電容的上限值和下限值。但是,這兩個值通常不能同時滿足,即當滿足直流電壓跟隨性時通常不能滿足直流電壓抗擾性。
本文著重討論了PWM整流器工作在相同模式下直流電壓跟隨性能指標的改善途徑。基于PSCAD/EMTDC軟件建立了PWM整流器仿真模型,通過對直流側電容的設計取值進行分析,提出在直流側采用新型器件數控電容在線調整的方法,實現直流側電壓的靈活控制。
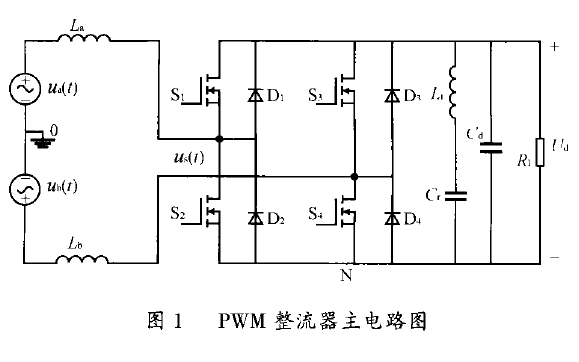
1、PWM整流器主電路和雙閉環控制結構
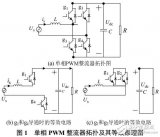
三相電壓型PWM整流器的拓撲結構如圖1所示。主電路采用IGBT與二極管反并聯的方式,Ls和Rs為電感的等效參數,C為直流濾波電容,RL為直流側負載,uca、ucb、ucc為整流橋三相控制電壓。
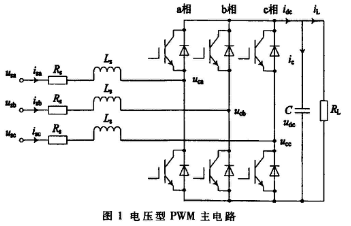
圖1所示的PWM整流器通過坐標變換得在同步旋轉坐標系下PWM整流器的方程為:
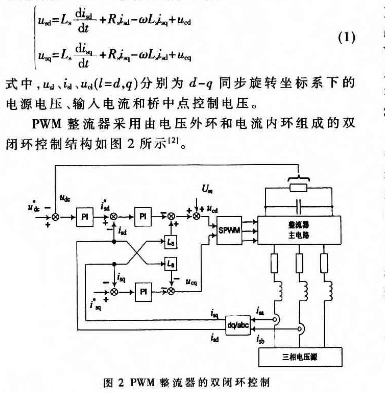
2、 基于PSCAD的PWM整流器控制器仿真模型
利用Mannitoba HVDC研究中心的PSCAD/EMTDC工具建立PWM整流器雙閉環控制仿真模型,如圖3所示。采用定直流電壓、定無功功率控制,假設所接負載為純電阻,無功功率參考值設為零,為了研究電壓跟隨性指標的變化情況,在某時刻將Udc參考值從Udcref1調整到Udcref2。
3、 數控電容仿真實現及直流側電壓改善分析
在電壓型三相橋式PWM整流器中,直流側電容主要用來緩沖VSR交流側與直流側的無功能量交換,抑制直流側電壓紋波,并且當負載發生變化時,支撐直流側電壓,限定直流電壓的波動。
一般而言,從滿足電壓環控制的跟隨性指標看,VSR直流側電容應盡量小,以確保VSR直流側電壓的快速跟蹤控制;而從滿足電壓環控制的抗擾性指標分析,VSR直流側電容應盡量大,以限制負載擾動時的直流電壓動態降落。新型數字化元器件的出現使得電容的在線調整成為可能。
3.1 數字電容器原理及實現
以往電容參數在設計過程中,需要根據實際需要,綜合考慮直流電壓跟隨性和抗擾性性能指標。新型數字化元件采用總線接口通過單片機或邏輯電路編程進行數控調節,實現了“把模擬器件放到總線上”的全新設計理念。典型的數字電容器有Maxim公司生產的MAX1474和Intersil公司生產的X90100等,可以在5 ?滋s內快速調整,隨著數控電容新器件工藝的不斷進步, 調整容量和范圍進一步增大。
3.2 直流側電壓指標改善分析
3.2.1 直流側電壓跟隨性分析
仿真實例取三相電壓型PWM整流器交流輸入線電壓有效值為100 V,直流側負載電阻為50 Ω,主功率開關器件采用IGBT實現。
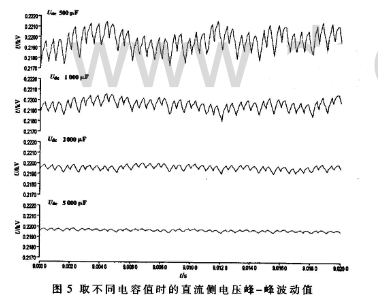
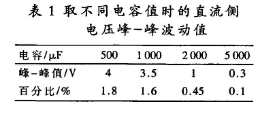
2 000 μF、5 000 μF時的直流側電壓變化曲線如圖4所示。
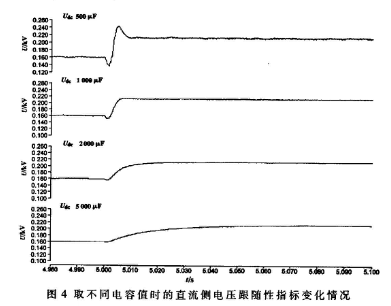
基于軟件仿真數據驗證得出以下結論:當電容取值大于1 100μF時,滿足紋波小于1%的要求;當電容取值小于2 000 μF時,可以較快地反應電壓跟隨性指標。因此確定電容取值范圍為1 100~2 000μF。
3.2.2直流側電壓抗擾性分析
分析直流側電壓的抗擾性的依據是PWM整流器的工作模式由最大功率整流變化到最大功率逆變時引起的直流側電壓波動最嚴重的情況,此時輸入輸出功率偏差最大,過渡過程最長。而PWM整流器經常工作在相同的工作模式下,可以根據直流電壓上的諧波要求來設計電容,穩態時直流輸入電流為直流量,諧波主要來源于一個開關周期內的開關諧波,其能量很小,引起的直流電壓波動也很小,設計電容值遠小于參考文獻中的電容設定上限值。因此,在直流側電壓跟隨性指標確定的電容范圍內,直流側電壓的抗擾性變化不大。
綜上分析表明,PWM整流器工作在相同模式時,電容值的調整對于改善直流側電壓跟隨性能效果明顯,但是對于改善直流側電壓抗擾性效果有限。
與改善PWM整流器網側電流時的在線調整數控電感的方法不同,數控電容參數的調整需要在直流側電壓參考值發生變化前完成,并且調整量分檔盡量小,否則會出現較大的電壓波動。
本文使用PSCAD/EMTDC軟件建立了PWM整流器的仿真模型。基于軟件仿真驗證的確定電容取值在較小范圍。提出了利用數控電容替代傳統的電容器,使得電容在線調整改善電壓環的動態響應的方法。仿真結果表明,電容的變化對直流側電壓跟隨性能改善效果顯著。該方法可根據不同情況下的控制要求,預先調整電容,靈活實現直流側電壓控制目標,在小功率電源變換電路和控制電路中有一定應用價值。
責任編輯:gt
-
整流器
+關注
關注
28文章
1524瀏覽量
92356 -
電容
+關注
關注
99文章
6001瀏覽量
150039 -
PWM
+關注
關注
114文章
5153瀏覽量
213448
發布評論請先 登錄
相關推薦
求一種整流器的直接功率控制Simulink仿真方案
電壓型PWM整流器功率控制策略研究
基于PR的單相PWM整流器電流控制研究
PWM整流器去噪中小波分析的研究
使用PWM整流器建立Matlab的仿真模型的詳細說明





 工商網監
工商網監
評論