 PLC對機器人干涉區的控制
PLC對機器人干涉區的控制
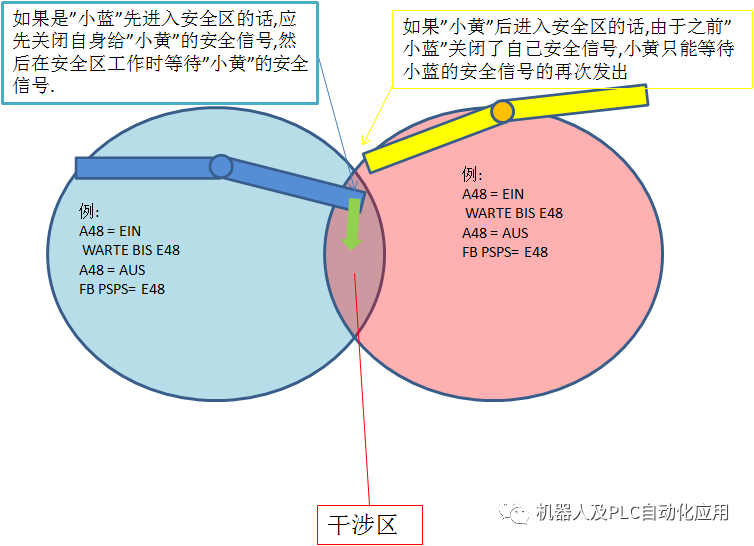
1.進入安全區時:
如果是”小藍”先進入安全區的話,應先關閉自身給”小黃”的安全信號,然后在安全區工作時等待”小黃”的安全信號.
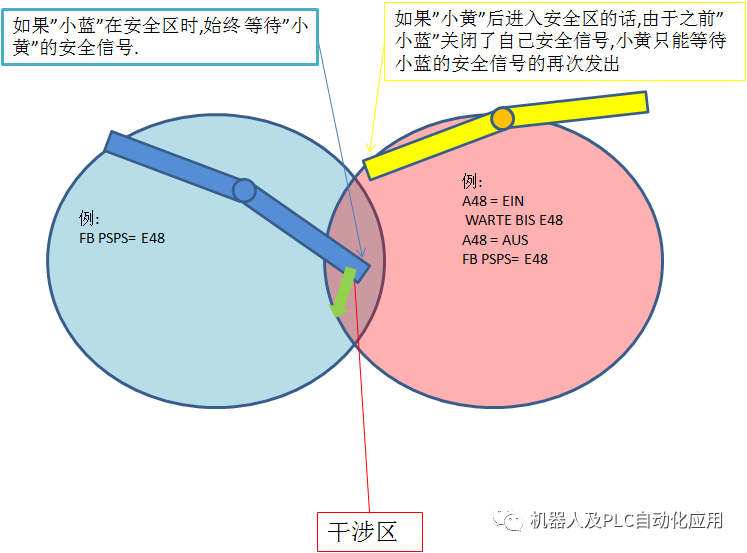
如果”小黃”后進入安全區的話,由于之前”小藍”關閉了自己安全信號,小黃只能等待小藍的安全信號的再次發出
2.在安全區時:
如果”小藍”在安全區時,始終 等待”小黃”的安全信號.
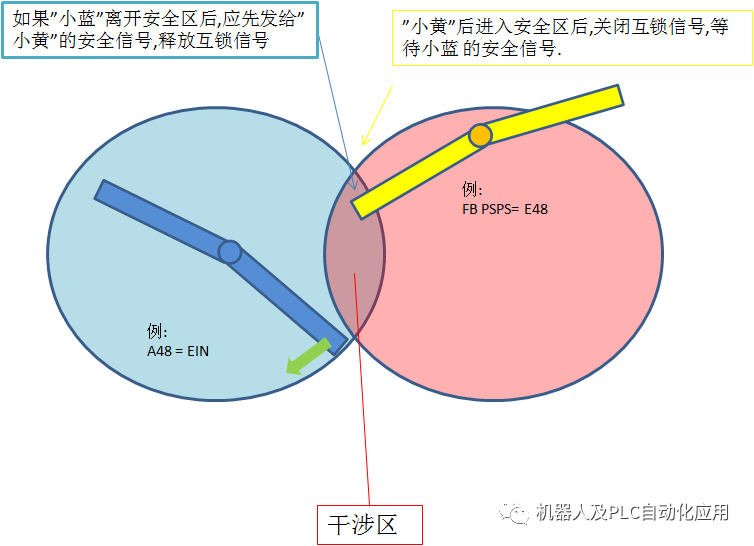
3.離開安全區時:
如果”小藍”離開安全區后,應先發給”小黃”的安全信號,釋放互鎖信號.
”小黃”后進入安全區后,關閉互鎖信號,等待小藍的安全信號.
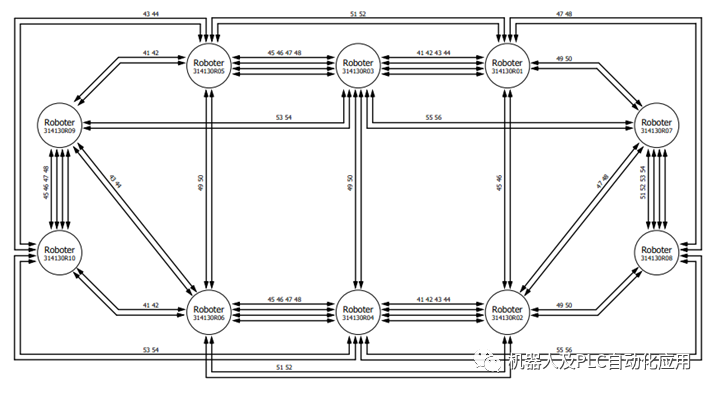
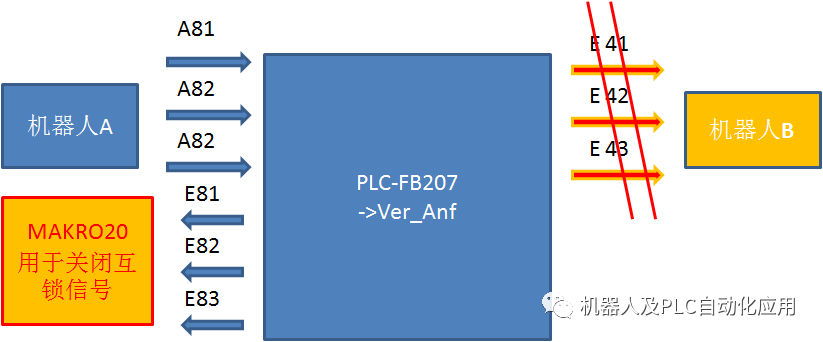
VASS 標準使用的互鎖標準:互鎖示意圖,設定機器人之間互鎖所使用的IO范圍.
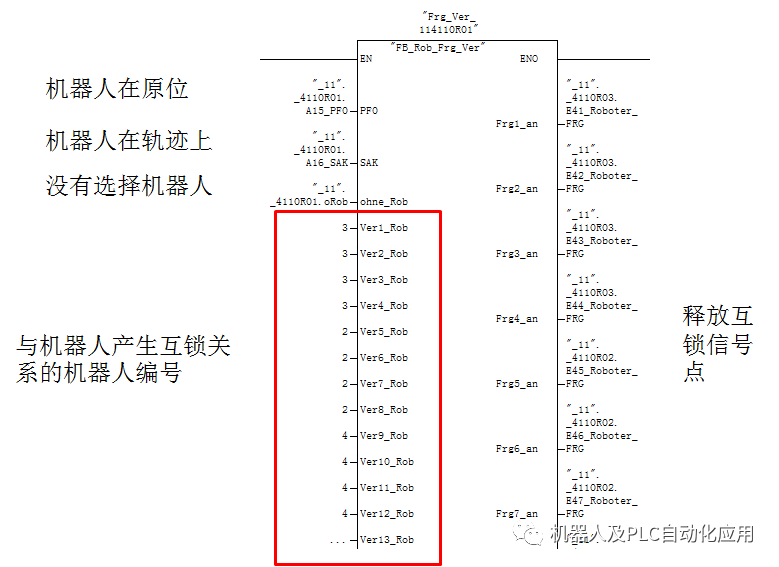
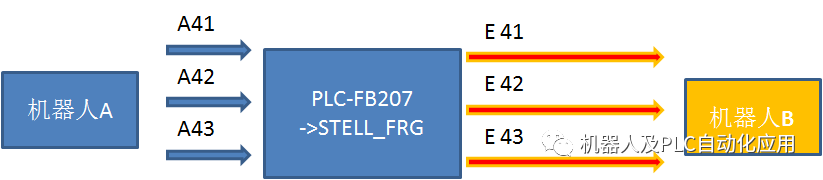
FB207機器人互鎖信號控制:
可以設置機器人在原位時默認發出互鎖釋放信號.
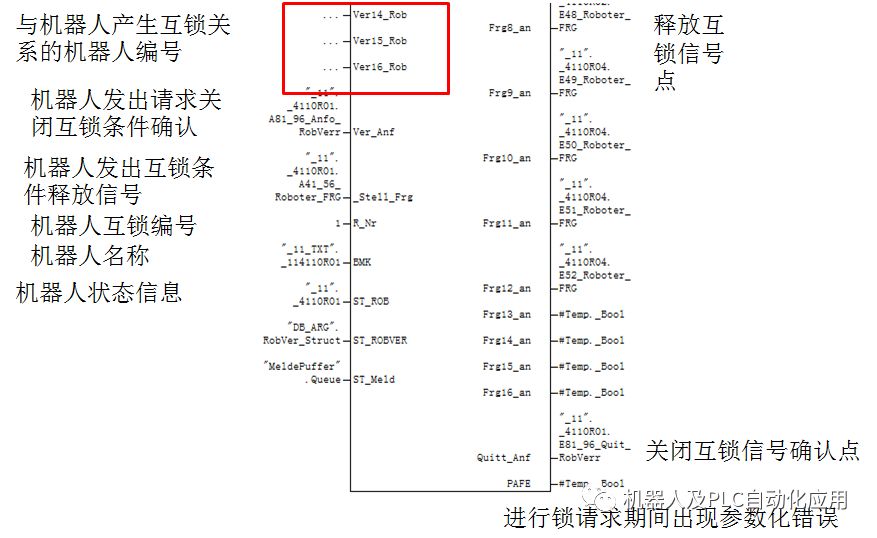
發出互鎖條件:
關閉互鎖條件:
釋放互鎖信號
7: A41 = EIN
9: A42 = EIN
11: A43 = EIN
13: A44 = EIN
關閉部分互鎖信號,開始進入干涉區工作。
30: A81 = EIN
31: A83 = EIN
32: SPSMAKRO20 = EIN 關閉A41和A43的互鎖信號
35: FB PSPS = E41 & E43
等待其他機器人給入的互鎖信號才能進入干涉區工作
離開干涉區后再次發出互鎖信號
4: A41 = EIN
6: A43 = EIN
FB PSPS = M1 & M30機器人不用再等干涉信號
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28231瀏覽量
206619 -
plc
+關注
關注
5008文章
13167瀏覽量
462196
原文標題:關于PLC隊機器人之間互鎖控制
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
伺服控制機器人的控制方式有哪些
伺服控制機器人是一種高度精確的自動化設備,它能夠執行復雜的任務,如精確定位、重復運動和力控制。伺服控制系統是機器人技術中的核心部分,它負責接
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
工業機器人、PLC與自動化之間的關系
隨著科技的不斷進步和工業領域的快速發展,自動化已成為現代工業生產的重要趨勢。在這一進程中,工業機器人和PLC(可編程邏輯控制器)作為自動化的兩大核心要素,發揮著至關重要的作用。本文將深入探討工業
ABB機器人與西門子PLC的Profinet通訊設置
在現代工業自動化領域中,機器人與PLC之間的通訊是實現高效、精準生產的重要環節。ABB機器人與西門子PLC之間的Profinet通訊設置,是實現兩者無縫對接的關鍵。本文將詳細介紹ABB
PLC與機器人之間如何通訊
在現代工業自動化領域,可編程邏輯控制器(PLC)和機器人作為兩大核心設備,其間的通訊是實現自動化生產線高效、穩定運行的關鍵。PLC以其高可靠性、強適應性和易編程性等特點,在工業自動化
如何使用PLC控制機器人
隨著工業自動化技術的飛速發展,機器人技術作為其中的重要組成部分,其應用范圍日益廣泛。在機器人的控制系統中,PLC(Programmable Logic Controller,可編程邏輯
簡述工業機器人控制系統的特點
工業機器人控制系統是工業機器人的核心組成部分,它負責接收輸入信號、處理信息、控制機器人的運動和執行任務。隨著工業自動化和智能制造的快速發展,
機器人控制系統的基本單元有哪些
引言 機器人是一種具有高度自動化和智能化的設備,它可以模擬人類的行為和思維,完成各種復雜的任務。機器人控制系統是機器人的重要組成部分,它負責接收傳感器的信號,處理數據,
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
和增強系統處理圖像的實時性,本文提出了一種伊瑟特的六自由度機器人視覺伺服控制系統,將攝像頭集成到基于 Zynq的伊瑟特主站上,提高了視覺伺服的實時性.經測試,該平臺能夠對視覺檢測目標的變化做出及時的反應
發表于 05-29 16:17
LabVIEW的六軸工業機器人運動控制系統
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。LabVIEW作為一個關鍵技術,在項目中扮演了核
發表于 12-21 20:03
PLC對機器人的互鎖信號控制
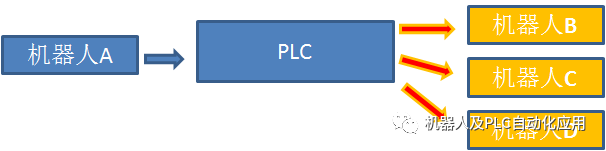
該塊協調各個機器人之間的互鎖請求。
為了防止機器人之間發生“死鎖” , 這些機器人在進入互鎖之前輸出互鎖請求并且等待 PLC 確認。
發表于 12-12 11:24
?1351次閱讀






 工商網監
工商網監
評論