 采用神經網絡與模糊推理結合實現環境實驗室溫濕度監測系統的設計
采用神經網絡與模糊推理結合實現環境實驗室溫濕度監測系統的設計
傳統的溫、濕度閉環控制通常采用開關控制或PID控制,前者實現簡單但精度差,后者精度高,但需建立數學模型,參數整定要求較高,而在溫濕度非線性復雜變化的環境下,不易精確建模。模糊控制理論是能夠模擬人腦智能,隨環境變化的自適應控制技術,適合于非線性系統和難以用數學模型精確描述的復雜系統。進一步可以采用神經網絡與模糊推理結合的控制新模式。
1、環境實驗室溫濕度監控系統結構
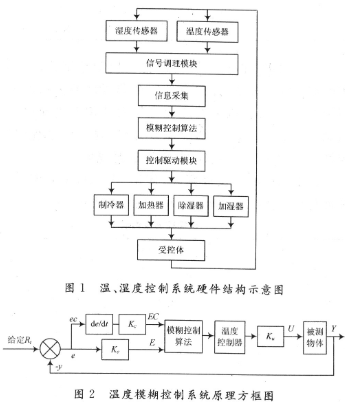
環境實驗室溫、濕度監測控制機構見圖1。溫、濕度傳感器測得的信號經過調理,輸入到模糊控制算法模塊,產生決策信號控制驅動件(加熱器、制冷器、加濕器、除濕器),保持環境實驗室溫、濕度恒定在設定值。
2、控制系統模糊控制機理
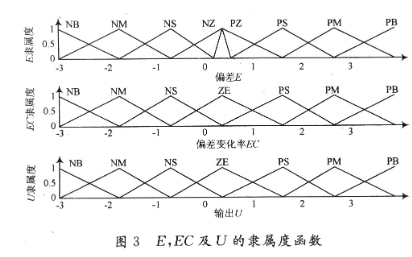
典型的模糊邏輯控制由模糊化、模糊推理和清晰化三部分組成。下面以溫度控制為例來具體說明。依據傳統模糊控制模型,本設計中溫度模糊控制系統原理如圖2所示。
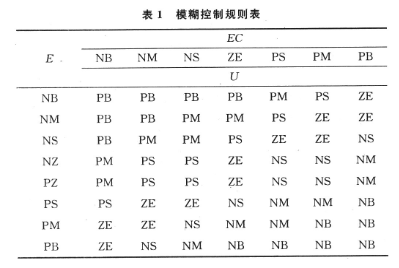
模糊控制器選用雙輸人單輸出控制方式,以溫度誤差e和誤差變化率ec作為輸入變量,以u作為輸出變量。模糊子集為E=EC=U={NB,NM,NS,ZE,PS,PM,PB}={負大,負中,負小,零,正小,正中,正大),其論域為:e=ec=u=[-3,3]={-3,-2,-1,0,1,2,3}。隸屬度函數采用三角分布函數,如圖3所示。
根據控制系統的輸入/輸出特性,以消除溫度偏差為控制目標,制訂控制規則如表1所示。
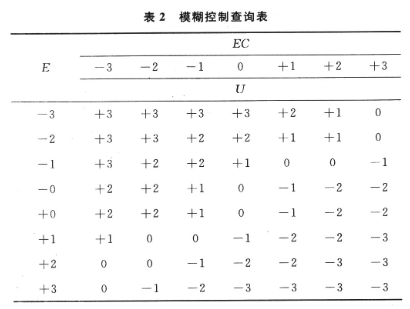
由模糊規則進行推理可以得出模糊控制器語言規則的輸入輸出關系,其關系是一個非線性的關系曲面。當偏差較大時,控制量的變化應盡力使偏差迅速減小;當偏差較小時,除了要消除偏差外,還要考慮系統的穩定性,防止系統出現過沖,甚至引起系統振蕩。由隸屬度函數及規則表,使用Mamdani推理方法和面積重心法進行清晰化,可得到控制查詢表。
對應輸出量U實際意義如表3所示。
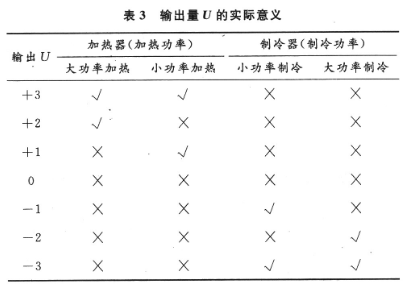
注:√表示啟動;×表示不啟動
工作機理:依照模糊控制查詢表建立的二維常數數組,將輸入偏差E和偏差變化率EC量化到其基礎變量論域,作為數組的行和列實時檢索該查詢表,得到實時輸出U,依照輸出量U的實際意義控制加熱器或制冷器,從而驅使溫度穩定在設定值。
3、控制系統程序設計
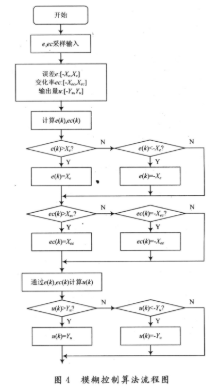
采用ST語言進行程序設計,包括主程序、模糊控制算法、中斷服務程序、操作命令與報警程序,其中模糊控制算法程序流程圖如圖4所示。
4、應用效果
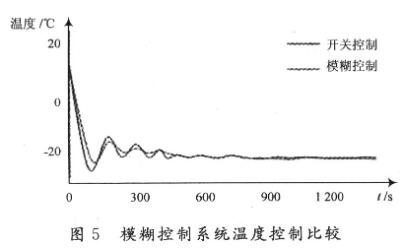
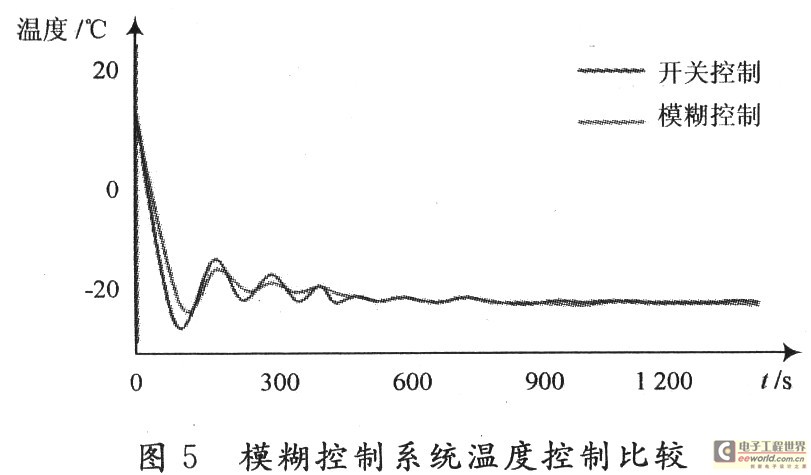
外部環境溫度從16℃降溫到-20℃,應用效果如圖5所示,從開始到基本穩定(與設定值相差±1℃)用時510 s,系統穩定后波動范圍在±O.8℃以內。收斂速度、系統穩定性與量化因子、比例因子有關,合理選擇量化因子、比例因子,在收斂速度與穩定性之間取得平衡。
5、結 語
本設計采用基于模糊控制理論的控制策略,實現了環境實驗室的溫度、濕度的可靠測量和控制,具有精度高、穩定性好、收斂速度快等優點,與傳統開關控制系統相比,具有精度、速度、穩定優勢;與基于預測的模糊控制方式、雙模糊控制策略、參數自學習模糊控制策略相比減少了運算復雜度。對于溫、濕度具有明顯耦合效應的環境,可以采用溫、濕度解耦合運算后,再分別進行控制。
責任編輯:gt
-
傳感器
+關注
關注
2548文章
50668瀏覽量
751981 -
神經網絡
+關注
關注
42文章
4762瀏覽量
100535 -
監測系統
+關注
關注
8文章
2675瀏覽量
81254
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論