 怎么樣才能使用CAN智慧云提高自動駕駛的安全性
怎么樣才能使用CAN智慧云提高自動駕駛的安全性
目前,新基建話題帶來的熱度還在繼續,自動駕駛該如何搭上這一快車?自動駕駛又涉及到哪些核心技術?如何利用CAN智慧云提高自動駕駛安全性能?本文將對此做逐一介紹。
聚焦深度轉型汽車行業,我們可以將自動駕駛車當作一個“擁有人類眼睛的智能輪式機器人”,可以識別周邊的車輛、故障、行人等情況,并對此作出精準的行為。不難知道,自動駕駛依賴于了人工智能AI、傳感器、大數據、5G等技術領域,幸運的是,自動駕駛站在這些技術的交匯處。
自動駕駛如何步入“快車道”?
自動駕駛為何會隨著新基建帶來的能量一起爆發,關鍵還是由自動駕駛的核心技術決定的。自動駕駛實際上包含了三個問題:一是我在哪兒?二是我要去哪兒?三是我要怎么去那兒?只有完美的解決這個三問題才能算是真正的自動駕駛,這其中包含的技術模塊如圖1所示。
圖1 自動駕駛技術框圖
◆ 傳感器技術:攝像頭、激光雷達、毫米級雷達等傳感器技術融合,識別外界環境;
◆ 高精度定位:運用GPS、GNSS、IMU等技術實現厘米級定位;
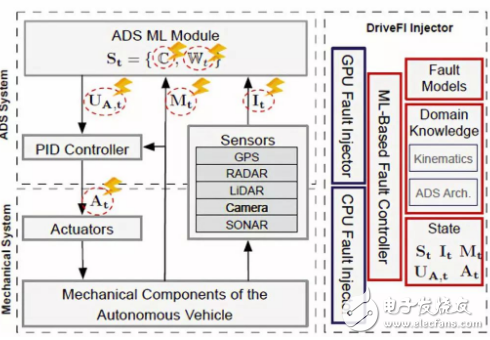
◆ AI人工智能:關鍵技術,充分的利用所得信息進行分析,并決定車輛該如何行駛,算法的核心任務如圖2所示;
◆ V2X通信安全:包含汽車和用戶信息,對用戶的身份驗證和給數據加密,依賴5G的大寬帶,低延時信息交互;
◆ HIM人機交互:人機交互界面用于人工處理自動駕駛機器人無法處理的情況。
圖2 自動駕駛AI核心算法任務
▌ZWS-CAN智慧云助力自動駕駛
上述圖2所示,自動駕駛通過一系列的核心算法任務后,最終會通過CAN-bus總線來控制車輛ECU工作,所以CAN通訊的質量對自動駕駛車輛的性能影響巨大,同時,CAN通訊情況的反饋幫助優化AI算法。那么,在自動駕駛路試階段,技術人員如何遠程去實時分析車輛運行情況呢?
▌車載CAN-bus數據記錄CANDTU系列
自動駕駛車輛在路試階段遇到問題時,測試人員很難去分析現場出現的狀況或者判斷車輛運行狀態是否良好。通常情況下,通過對車輛CAN報文的分析才可以了解車輛的轉速、壓力等情況,進而進一步反饋優化AI算法任務。
ZLG致遠電子推出CAN網絡總線“黑匣子”,我們稱之為CANDTU,測試人員可以使用CANDTU記錄路試階段的CAN報文數據,以便對車輛進行整體故障診斷。
CANDTU產品性能如下:
◆ 集成2路或4路符合ISO11898標準的獨立CAN通道;
◆ 標配存儲介質32G高速SD卡,支持長時間記錄、條件記錄、預觸發記錄等多種記錄模式,可以進行大數據存儲;
◆ 支持ASC、CSV等多種記錄數據存儲格式轉換,方便后期軟件分析;
◆ 通過嚴格的抗震動、抗沖擊測試,滿足工業用戶需求;
◆ 具備2路DI記錄和2路DO報警輸出;
◆ 支持GPS定位,4G通信實時上傳云端,通過手機等終端實時查看汽車定位、儀表、油溫油壓情況,如圖3所示。
圖3 CANDTU的應用
▌ZWS-CAN智慧云
自動駕駛車輛在路試階段,測試人員是如果能夠實時遠程的監控車輛信息,第一時間掌握車輛的信息,那對提高車輛的性能會有很大的幫助。ZLG致遠電子提供ZWS-CAN智慧云解決方案,通過CANDTU系列產品的4G通訊連接云端服務器,將CAN報文數據回顯復現現場,實現遠程監控自動駕駛車輛,進行故障診斷。那么,ZWS-CAN智慧云能夠為自動駕駛車輛提供哪些特色服務和功能?接下來做簡單介紹。
▌云端曲線,CAN報文可視化分析
ZWS-CAN智慧云能夠實現DBC的可視化分析,結合豐富多彩的圖形控件,及時進行CAN(FD)數據的可視化展示,直觀分析車輛運行情況,如圖4所示能夠對信號值進行顯示和信號跟蹤。
▌支持車載UDS診斷
用戶可以通過ZWS-CAN云端服務器,直接對車輛進行標準的UDS診斷,實現對設備的監控,如圖5所示。
▌支持北斗/GPS定位
如圖6所示,登陸ZWS-CAN云端服務器可以進行地圖可視化的定位,實時顯示車輛運行速度,對車輛運行軌跡進行記錄存儲。定位精度在2m左右,對車輛故障分析定位有較高的可信度,結合車輛運行狀況,優化AI算法。
▌自定義測試腳本
ZWS-CAN云端服務器支持自定義測試腳本,通過編輯器與執行器功能,如圖7所示可以進行發送、等待、校驗、校驗響應等動作,實現對設備的自動化測試,方便用戶遠程測試車輛性能。
-
傳感器
+關注
關注
2548文章
50664瀏覽量
751941 -
CAN
+關注
關注
57文章
2715瀏覽量
463365 -
自動駕駛
+關注
關注
783文章
13682瀏覽量
166139
發布評論請先 登錄
相關推薦
FPGA在自動駕駛領域有哪些應用?
FPGA在自動駕駛領域有哪些優勢?
自動駕駛真的會來嗎?
高級安全駕駛員輔助系統助力自動駕駛
如何讓自動駕駛更加安全?
智能感知方案怎么幫助實現安全的自動駕駛?
為何自動駕駛需要5G?
網聯化自動駕駛的含義及發展方向
LabVIEW開發自動駕駛的雙目測距系統
如何量化自動駕駛的安全性?

自動駕駛的安全性考量
英偉達為提高安全性 開發了自動駕駛可擴展安全性測試平臺DriveFI





 工商網監
工商網監
評論