 數據處理時為什么要從DMA緩存空間中獲取?
數據處理時為什么要從DMA緩存空間中獲取?
筆記中最后得出一個串口接收的總結“空閑中斷 + DMA + 隊列 + 內存管理 + 定時控制”。因為空閑中斷的誤觸發,導致我們不得不使用定時器來達到接收完整一幀的效果,這樣一來,就會導致一些問題:1、數據吞吐率低,發送方需要延時一段時間后才能發送下一幀;2、響應不及時,因為有延時,必然導致接收方回復慢。3、空間利用率不高,如果一個短幀到來,會導致整幀緩存空間(這個空間大小一般是最大幀長)無法使用。
今天魚鷹自己對自己進行一次升級,改用“空閑中斷 + 循環DMA + 無鎖隊列”的方式進行最為高效的接收方式(無鎖隊列以后有時間再寫,這次的重點不在這)。這種接收方式魚鷹在接觸了循環隊列后就開始思考了,那個時候工作沒多久,然后一位前輩使用的就是空閑中斷 + DMA 的方式接收,也算是驚到魚鷹了。后來魚鷹在想,循環隊列的優勢顯而易見,而DMA在設置為循環模式時,天然就是一個循環隊列,我是否能將循環隊列和DMA相結合,實現一個循環緩存空間呢?具體當時是如何思考的魚鷹已不記得了,只知道當時利用KEIL的模擬功能貌似是實現了想要的效果,但是在實際測試過程中應該是出現了問題,所以導致這個想法擱置了。這個實現代碼魚鷹會一并上傳到公眾號,讓各位道友參考一二,自認為自己符合條件的自行獲取就是了。直到最近看到頭條一位讀者的評論,魚鷹的心思才又活泛起來了,通過評論交流,終于理解了其中是如何實現的,也想到了如何將其和無鎖隊列相結合,也就有了這一次筆記的分享。
實習時初次接觸空閑中斷時,用的接收方式是 空閑中斷 + 串口接收中斷,這個算是 V1.0版。后來正式工作后接觸到的是 “空閑中斷 + DMA”這個是V2.0,后來魚鷹在此基礎上進行改進,加入了隊列,加入了定時器,算V2.5好了。這次效率更高,而且空間利用率也高,中斷處理簡單到到極致,定為V3.0。可能很多人在之前的筆記中根本無法真正理解魚鷹的本意,因為這份筆記太長,如果沒有一定的經驗根本無法體會,盡管有一份參考代碼放在后臺供各位道友進行參考,但是因為那份代碼只解決了一個定時器控制問題,注釋也不詳盡,還是魚鷹的初次思考,所以相信很多人看到這份代碼都是云里霧里的,還是無法實現其中的細節。那么今天魚鷹就來簡單描述其中的關鍵細節實現:
串口接收實現V1.01、初始化時開啟串口的接收中斷和空閑中斷2、串口中斷處理時,每接收一個字節存入緩存空間(注意控制越界問題)3、一旦空閑中斷來了,停止接收,設置標志位,通知上層已完成一幀數據的接收,上層負責數據的處理工作。當然為了防止誤觸發,也可以使用定時器進行進一步控制,也可以在此基礎上加入緩存隊列。
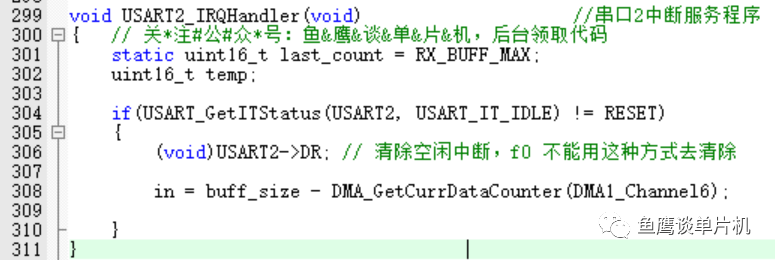
串口接收實現V2.01、初始化時開啟串口的空閑中斷,并且初始化為正常DMA。2、觸發空閑中斷時,通知上層接收完成并且將其拷貝到一個緩存中供上層使用,然后重新啟動DMA進行下一次的接收,因為幀與幀之間有空閑時間,只要保證這段時間大于中斷處理時間,那么接收一般不會出現問題。這里有一個關鍵點就是,如何獲取這次接收的數據長度:
Rev_Size = DMA_Set_Size - CNDTR
Rev_Size 是實際接收的長度,DMA_Set_Size是初始化DMA時設置的緩存大小,這個大小一般大于等于一幀數據的最大長度,并且最好是它的2倍以上,這樣極端情況下不容易被下一幀數據所覆蓋(怕中斷處理不及時導致覆蓋了之前已接收的數據)。而 CNDTR就是 DMA 寄存器中記錄目前剩余需要接收的大小,當它為 0 時表示接收完成,DMA自動關閉。好好理解一下,實現起來不難。 串口接收實現V3.0
1、初始化時開啟串口的空閑中斷,并且初始化為循環DMA。2、觸發空閑中斷時,更新索引,這個索引表示當前寫入索引值,用于上層判斷緩存空間已寫入的數據(魚鷹前面寫了關于循環FIFO的筆記,可自行查看,如果不懂這個,下面的你理解不了,數據結構系列文章之隊列 FIFO)。3、如果加入無鎖FIFO,更新in索引值。數據處理時只要從DMA緩存空間中獲取即可。
現在我們來分析一下更細節的東西1、緩存大小?2、如何獲取數據?3、好處?4、隱患,缺點?緩存大小可以根據需要設置,這個需要看你數據處理的延遲時間。比如說發送者10 ms發送一幀數據,你的數據處理正常時候10 ms處理一次,但有時候CPU 負擔重,你的數據處理優先級較低,那么可能20 ms才會處理,那么緩存空間必然需要大于兩幀數據才行,這個空間需要測試后才能確定,而且需要留有一定的富余才行。那么如何獲取數據?通過學習循環FIFO的知識我們知道,循環FIFO由兩個變量in和out進行數據管理,如果我們的in可以根據DMA剩余量進行更新,那么就可以根據in和out之間的關系知道目前緩存空間里面到底有多少未處理的數據了。那么如何更新呢?魚鷹就不藏私了,直接在此說明,不過加入無鎖FIFO的就自己從參考代碼中獲取了,這個其實都差不多。
In = DMA_Set_Size - CNDTR(CNDTR永遠不會是0)
是不是很驚訝,是不是不可思議,你和終極接收方式只差一層窗戶紙?當年魚鷹為了更新這個值,用了老長一段代碼實現:

而現在再看這個代碼,已經忘記當初是咋想的了,但是這個式子確實可以更新in的值,即上面的offset,只是當初想的有點復雜了。簡單來說,就是先通過CNTR和之前的 offset 獲取目前的接收的長度(這個應該是受V2.0版本影響),然后根據長度更新目前的offset。但是通過讀者的評論,發現根本不需要這樣麻煩。只要有了in的值,然后又有out,那么獲取隊列中的數據也就不難了。
其實如果說采用循環DMA只是減少了中斷的代碼,讓中斷處理時間更短,那么魚鷹還是會選擇以前的V2.0的接收方式,畢竟這種方式實現了幀隔離,但是讀者的一個評論提醒了我,那就是這種方式不需要重新啟動DMA。這意味著什么?意味著高效,意味著DMA持續工作,意味著不存在因為DMA的短暫關閉而導致數據丟失。這就是魚鷹接下來要說的優點:1、中斷代碼及其簡單,像上面那種只是更新in的話只需要三條代碼即可完成。2、不需要重啟DMA3、因為不需要重啟DMA,也就減少了這段時間串口數據的丟失4、數據吞吐量可以達到最大化,每幀數據只需間隔一個空閑時間即可繼續發送。最大程度的利用了串口的接收能力,而且不用擔心數據丟失,這對于快速數據的接收是非常有好處的。5、就算你不想數據幀之間出現空閑間隔時間,你也可以通過一個定時器定時更新in的值。6、即使在串口中斷更新in的值時DMA又在接收數據,也不會出現問題,這個原理和無鎖FIFO一樣。7、不需要定時控制,防止空閑中斷的誤觸發。8、即使因為中斷體系短暫關閉,而導致空閑中斷不能及時處理,也不會影響DMA在后臺自動接收數據。 優點很多,缺點也有,下面就來嘮叨嘮叨缺點:1、因為所有數據都在一個緩存中,無法實現幀與幀之間的硬性隔離,所以必須通過數據本身確定一幀數據,對于數據的處理難道較高,這一點目前魚鷹采用狀態機處理,但是總感覺效率較低,后期看看能不能升個級啥的。2、因為無法實現幀隔離,所以一旦因為硬件干擾啥的導致多或少接收一個字節數據,又或者數據接收錯誤,那么再從緩存中得到一幀完整數據就比較耗時了,所以狀態機一定要有自恢復機制,能夠繼續處理后續的數據幀。3、一旦數據處理比較慢,而剩余緩存空間不夠大,那么未處理的數據將自動被DMA接收的新數據所覆蓋,所以緩存大小一定要有富余。4、一次發送的數據大于或等于緩存空間,那么in的值就有問題,所以發送者發送的一幀數據一定不能大于或等于緩存空間,切記這一點。 上面的第3點可以通過處理來提醒用戶緩存不夠(有些無法情況無法發覺),這個魚鷹在代碼中做了處理,各位可參考。而第四點一般不會出現,這是在設計DMA緩存時就會考慮的。
責任編輯:pj
-
緩存
+關注
關注
1文章
233瀏覽量
26649 -
dma
+關注
關注
3文章
559瀏覽量
100442 -
數據處理
+關注
關注
0文章
581瀏覽量
28531
發布評論請先 登錄
相關推薦
eda中常用的數據處理方法
FPGA在數據處理中的應用實例
實時數據處理的邊緣計算應用
如何在KEIL軟件中將變量定義在特定的RAM空間中
STM32CUBEMX(2)--USART通過DMA方式接收不定長數據
巖土工程監測中振弦采集儀數據處理與解讀的挑戰與方法

STM32F4雙ADC同步采樣的DMA數據處理,數組的大小對采樣有什么影響嗎?
在DMA運行時,其他的數據轉移會不會因DMA占用導致這些東西延時處理?
VR虛擬空間中的3D 技術

DMA搬運的數據長度超過65535怎么處理?
STM32F407在HAL庫下使用SPI通過DMA發送數據時,如何獲取DMA發送計數?
工程監測領域振弦采集儀的數據處理與分析方法探討

工程監測中振弦采集儀的數據處理方法研究





 工商網監
工商網監
評論