 利用STM32F4和Android控制六足機器人演示介紹
利用STM32F4和Android控制六足機器人演示介紹
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
Android
+關注
關注
12文章
3925瀏覽量
127156 -
硬件工程師
+關注
關注
179文章
357瀏覽量
75409 -
六足機器人
+關注
關注
9文章
23瀏覽量
17031
發布評論請先 登錄
相關推薦
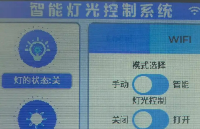
STM32項目實戰:基于STM32F4的智能燈光控制系統(LVGL),附項目教程/源碼
平臺是STM32F4開發板+資源擴展板+顯示觸摸屏+仿真器,項目的演示界面如下圖所示。智能燈光控制系統項目,需要一個LED燈光執行器件,模擬燈光效果;一個光照傳感
【CW32開發】初探四足機器人
本項目使用8自由度舵機控制的四足機器人。主要用于愛好者學習參考。可實現基本控制姿態:前進、左轉、右轉、打滑、伸展、站立、躺平、擺手。有興趣的朋友,也可以增加新步態

在NVIDIA Isaac Lab中訓練四足機器人運動
由于涉及復雜的動力學,為四足機器人制定有效的運動策略是機器人領域面臨的重大挑戰。在現實世界中訓練四足機器人上下樓梯可能會損壞設備和環境,因此

Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
。實物圖如圖2-4 所示。
圖 2-4 環形光源實物圖
基于伊瑟特的六自由度機器人視覺伺服控制系統如圖 2-5 所示。
設計
發表于 05-29 16:17
上海交大導盲六足機器人:視覺環境感知,自主導航與躲避
導盲六足機器人采用規模化制造,以降低成本,從而解決導盲犬短缺的問題。此外,通過構建互聯網服務系統,它還能實現家庭陪伴及緊急情況處理等功能。
六軸焊接機器人的操作流程
靈活的操作性和較高的工作效率,今天跟隨創想智控焊縫跟蹤小編一起了解六軸焊接機器人的操作流程。 一、機器人準備 開機自檢:啟動機器人控制系統,

基于FPGA的六自由度機器人視覺伺服控制方案設計
? 機器人視覺系統的硬件選擇直接影響圖像采集,圖像的質量和后期的處理,并影響整個控制系統的實時性,所以應根據要求和這些硬件性能,嚴格選擇硬件。基于伊瑟特的六自由度機器人視覺伺服
發表于 04-24 10:31
?446次閱讀

LabVIEW的六軸工業機器人運動控制系統
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。La
發表于 12-21 20:03
開源作品!稚暉君超迷你低成本開發板、超酷機器人、智能手環等參考方案
單片機用于處理藍牙模塊接收到的數據,對電機驅動電路發送信號控制電機,超聲波模塊用于測量距離,TFT顯示屏用于顯示機器人當前電量。
由于內容較多,先展示一下效果圖給大家看看,點擊下面查看原文即可查看全文
發表于 12-12 10:28
使用STM32F4芯片驗證SPI功能的問題分析
有人使用STM32F4芯片驗證SPI功能。當使用片內兩個SPI模塊基于中斷方式進行收發時,發現總是出現接收數據丟失的情況,貌似總丟失末尾2個數據。代碼使用HAL庫提供的API函數。這是怎么回事呢?
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
ROS系統是什么
ROS(Robot Operating System)是一個適用于機器人的開源的元操作系統。它提供了操作系統應有的服務,包括硬件抽象,底層設備控制,常用函數的實現,進程間消息傳遞
發表于 11-30 16:01





 工商網監
工商網監
評論