") 閉環(huán)控制系統(tǒng)基本組成_閉環(huán)控制系統(tǒng)日常舉例
閉環(huán)控制系統(tǒng)基本組成_閉環(huán)控制系統(tǒng)日常舉例
閉環(huán)控制系統(tǒng)基本組成
一個(gè)典型的反饋控制系統(tǒng)的基本組成可以用圖1.8所示的框圖表示。將組成系統(tǒng)的元件按在系統(tǒng)中的職能來(lái)劃分,主要有以下幾種:
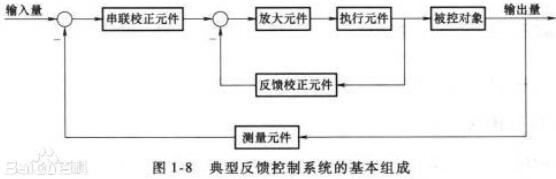
(1)給定元件:給出與期望輸出對(duì)應(yīng)的輸入量。
(2)比較元件:求輸入量與反饋量的偏差,常采用集成運(yùn)算放大器(簡(jiǎn)稱集成運(yùn)放)來(lái)實(shí)現(xiàn)。
(3)放大元件:由于偏差信號(hào)一般較小,不足以驅(qū)動(dòng)負(fù)載,故需要放大元件,包括電壓放大及功率放大。
(4)執(zhí)行元件:直接驅(qū)動(dòng)被控對(duì)象,使輸出量發(fā)生變化。常用的有電動(dòng)機(jī)、調(diào)節(jié)閥、液壓馬達(dá)等。
(5)測(cè)量元件:檢測(cè)被控量并轉(zhuǎn)換為所需要的電信號(hào)。在控制系統(tǒng)中常用的有用于速度檢測(cè)的測(cè)速發(fā)電機(jī)、光電編碼盤等;用于位置與角度檢測(cè)的旋轉(zhuǎn)變壓器、自整機(jī)等;用于電流檢測(cè)的互感器及用于溫度檢測(cè)的熱電偶等。這些檢測(cè)裝置一般都將被檢測(cè)的物理量轉(zhuǎn)換為相應(yīng)的連續(xù)或離散的電壓或電流信號(hào)。
(6)校正元件:也叫補(bǔ)償元件,是結(jié)構(gòu)與參數(shù)便于調(diào)整的元件,以串聯(lián)或反饋的方式連接在系統(tǒng)中,完成所需的運(yùn)算功能,以改善系統(tǒng)的性能。根據(jù)在系統(tǒng)中所處的位置不同,可分別稱為串聯(lián)校正原件和反饋校正元件。
閉環(huán)控制系統(tǒng)日常舉例
閉環(huán)控制系統(tǒng):反饋控制系統(tǒng)又稱閉環(huán)控制系統(tǒng)。輸出對(duì)控制效果有直接影響。工作原理:閉環(huán)控制有反饋環(huán)節(jié)。通過(guò)反饋系統(tǒng),提高了系統(tǒng)的精度,縮短了響應(yīng)時(shí)間。它適用于響應(yīng)時(shí)間和穩(wěn)定性要求較高的系統(tǒng)。
例如,控制對(duì)象是溫爐,輸出變量是實(shí)際爐溫,輸入變量是給定的恒溫,一般用電壓表示。爐溫用熱電偶測(cè)量。將代表爐溫的熱電動(dòng)勢(shì)與給定的電壓進(jìn)行了比較。二者的差分電壓用于驅(qū)動(dòng)相應(yīng)的執(zhí)行器進(jìn)行功率放大后的控制。
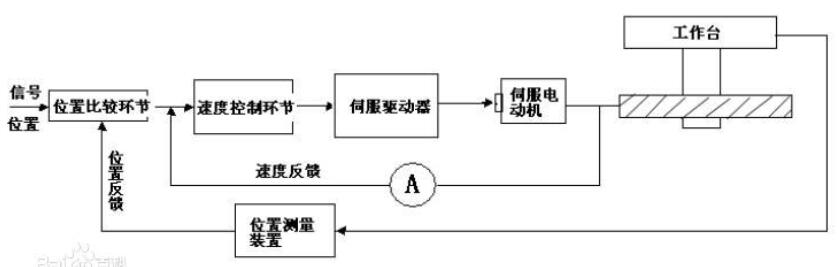
這是一種自動(dòng)控制系統(tǒng),其中包括功率放大和反饋,使輸出變量的值響應(yīng)輸入變量的值。數(shù)控裝置發(fā)出指令脈沖后,當(dāng)指令值送到位置比較電路時(shí),此時(shí)若工作臺(tái)沒有移動(dòng),即沒有位置反饋信號(hào)時(shí),指令值使伺服驅(qū)動(dòng)電動(dòng)機(jī)轉(zhuǎn)動(dòng),經(jīng)過(guò)齒輪、滾珠絲杠螺母副等傳動(dòng)元件帶動(dòng)機(jī)床工作臺(tái)移動(dòng)。裝在機(jī)床工作臺(tái)上的位置測(cè)量元件,測(cè)出工作臺(tái)的實(shí)際位移量后,后反饋到數(shù)控裝置的比較器中與指令信號(hào)進(jìn)行比較,并用比較后的差值進(jìn)行控制。若兩者存在差值,經(jīng)放大器后放大,再控制伺服驅(qū)動(dòng)電動(dòng)機(jī)轉(zhuǎn)動(dòng),直至差值為零時(shí),工作臺(tái)才停止移動(dòng)。這種系統(tǒng)稱為閉環(huán)伺服系統(tǒng)。
-
閉環(huán)控制系統(tǒng)
+關(guān)注
關(guān)注
1文章
26瀏覽量
8437 -
反饋控制系統(tǒng)
+關(guān)注
關(guān)注
0文章
12瀏覽量
2513
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
DACx1001實(shí)現(xiàn)超高精度閉環(huán)控制系統(tǒng)設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論