") 大擺臂氣缸控制塊FB410分析:
大擺臂氣缸控制塊FB410分析:


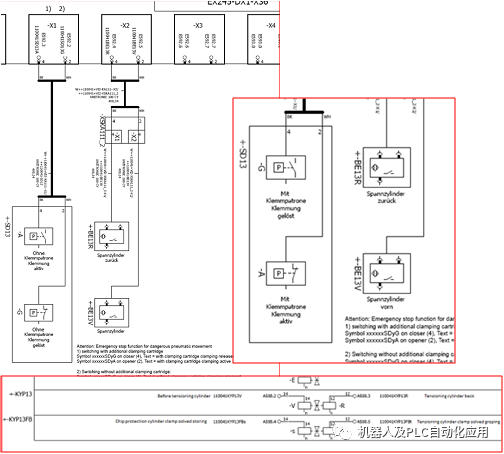
采用該模塊,可以利用最多 8 個(gè)末位位置反饋信號(hào)對(duì)提升和傾斜氣缸(臂長(zhǎng)超過(guò)300 mm )進(jìn)行控制。末位位置反饋信號(hào)以字節(jié)的方式傳送給模塊。氣缸通過(guò)一個(gè)五位兩通換向閥(用于實(shí)現(xiàn)運(yùn)動(dòng))和一個(gè)五位三通換向閥進(jìn)行控制(用于實(shí)現(xiàn)夾緊)。該模塊可以用于帶/不帶夾具盒的氣缸。該模塊一般采用自己的背景數(shù)據(jù)模塊進(jìn)行訪問(wèn)。
雙閥壓力控制:

故障列表:
MSys.xF_1 := xF_Frg; //故障釋放故障
MSys.xF_2 := xF_VerR;//返回的鎖定錯(cuò)誤
MSys.xF_3 := xF_VerV;//伸出的鎖定錯(cuò)誤';
MSys.xF_4 := xF_BFG_R; //檢測(cè)器控制R故障';
MSys.xF_5 := xF_BFG_V; //檢測(cè)器控制V發(fā)生故障';
MSys.xF_6 := xF_EndR_voA; //離開(kāi)后端位置沒(méi)有任何
MSys.xF_7 := xF_EndV_voA; //嘗試離開(kāi)前的終點(diǎn)位置
MSys.xF_8 := xF_EndR;//不要離開(kāi)后端位置
MSys.xF_9 := xF_EndV;//不要在離開(kāi)終點(diǎn)位置之前
MSys.xF_10 := xF_ZuebR; //返回時(shí)間監(jiān)控
MSys.xF_11 := xF_ZuebV; //伸出時(shí)間監(jiān)控
MSys.xF_12 := (bF_Stoe & BYTE#1) <> BYTE#0; //‘STE/夾具氣缸故障Zyl. a';
MSys.xF_13 := (bF_Stoe & BYTE#2) <> BYTE#0; //'STE/夾具氣缸故障Zyl. b';
MSys.xF_14 := (bF_Stoe & BYTE#4) <> BYTE#0; //'STE/夾具氣缸故障Zyl. c';
MSys.xF_15 := (bF_Stoe & BYTE#8) <> BYTE#0; //'STE/夾具氣缸故障Zyl. d';
MSys.xF_16 := (bF_Stoe & BYTE#16) <> BYTE#0; //'STE/夾具氣缸故障Zyl. e';
MSys.xF_17 := (bF_Stoe & BYTE#32) <> BYTE#0; //'STE/夾具氣缸故障Zyl. f';
MSys.xF_18 := (bF_Stoe & BYTE#64) <> BYTE#0; //'STE/夾具氣缸故障Zyl. g';
MSys.xF_19 := (bF_Stoe & BYTE#128) <> BYTE#0; //'STE/S夾具氣缸故障Zyl. h';
MSYS.xF_20 :=xF_FB_1; //故障壓力控制夾緊'
MSYS.xF_21 :=xF_FB_2; //夾鉗故障未解除
MSYS.xF_22 := xF_KYPxxBER OR xF_KYPxxFBBER; //'STE/閥線圈故障'
擺臂控制原理:
-
數(shù)據(jù)模塊
+關(guān)注
關(guān)注
0文章
11瀏覽量
9770 -
氣缸
+關(guān)注
關(guān)注
2文章
53瀏覽量
13555
原文標(biāo)題:大擺臂氣缸控制塊FB410分析:
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
使用TMS320C40分析模塊的硬件監(jiān)控器

2024年汽車(chē)操作系統(tǒng)趨勢(shì)及TOP10分析報(bào)告

分析討論單臂電橋電阻的誤差原因
磁性開(kāi)關(guān)和氣缸怎樣配合使用
磁性開(kāi)關(guān)如何控制氣缸的兩個(gè)位置
氣缸磁性開(kāi)關(guān)怎么接線

如何去提升機(jī)械臂的位置控制性能?

帶NC-SMQ75的Indalloy 171分析測(cè)試報(bào)告
氣缸內(nèi)部結(jié)構(gòu)及原理3D動(dòng)畫(huà)
西門(mén)子博途:SCL中FB模塊的結(jié)構(gòu)


西門(mén)子博途示例:設(shè)置優(yōu)化塊訪問(wèn)

西門(mén)子博途:調(diào)用FB(實(shí)例化)

【開(kāi)源獲獎(jiǎng)案例】四軸機(jī)械臂控制系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論