 KUKAC2機器人程序備份更改路徑
KUKAC2機器人程序備份更改路徑
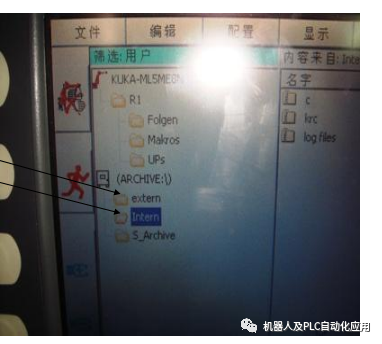
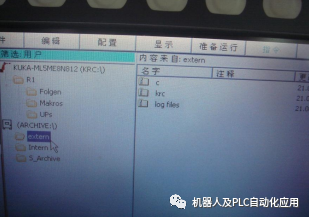
E盤:extern
A盤 :intern
機器人程序備份路徑分為A盤 :intern ,另外一個是E盤:extern。兩者的的區分在于先插入系統的系統會認為是A盤 :intern,后插入系統的系統會認為是E盤:extern。兩個U盤在備份中最大的區別在于,A盤備份程序時,所有機器人備份出來的程序名只能是intern.zip,所以A盤里只會存在一個程序,而E盤備份出來的程序名稱是可以自己定義的,只要現場機器人名稱定義的不一樣,所有機器人程序就都可以存到這個U盤里。
在系統C/KRC/UTIL/KRCCONFIGURATOR目錄下找到 krcConfigurator.exe文件,里面有存儲機器人程序的路徑 .
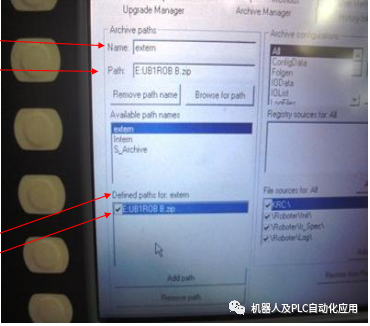
Name:是定義內部路徑還是外部路徑.
Path:是定義路徑的詳細名稱。例如:我們想把程序備份到E盤里,那么Name里一定寫的是extern,Path里寫的應該是E:UB1 ROB B.ZIP。
注意:UB1 ROB B一定要與你機器人參數里的名稱一致,否則機器人不會識別此路徑。
在Defined paths for extern 里需要將E:UB1 ROB B.ZIP激活.
機器人參數菜單:
機器人名稱:
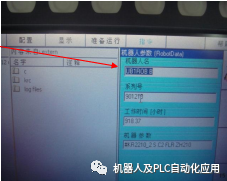
更改后機器人名稱會在此有顯示 :

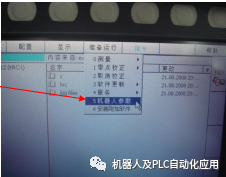
我們備份程序時有兩種途徑。
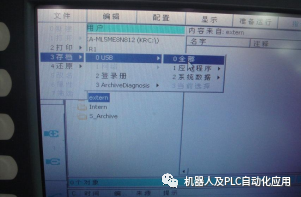
1.在菜單條:文件/存檔/USB/全部。
2.在ARCHIVE:/里選擇 intern 還是 extern ,全部存檔。兩種方式都可以。當我們備份完程序后應該看一下extern里是否有程序存在,如果有則證明成功。
-
機器人
+關注
關注
210文章
28231瀏覽量
206618 -
程序
+關注
關注
116文章
3778瀏覽量
80860 -
KUKA
+關注
關注
3文章
217瀏覽量
16491
原文標題:KUKAC2機器人程序備份更改路徑
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
焊接機器人編程技巧與注意事項
認識機器人與CW32四足機器人控制項目
開源項目!用ESP32做一個可愛的無用機器人
柔性機器人與剛性機器人區別與聯系

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
Al大模型機器人
ABB機器人的基本程序數據有哪些
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
EPSON助力智能泳池清潔機器人導航

ABB工業碼垛機器人常見故障及處理方法
使用 NVIDIA Isaac 仿真并定位 Husky 機器人






 工商網監
工商網監
評論