 常見的激光三角測量法
常見的激光三角測量法
工業生產中,經常需要對物體表面的相對距離和方位進行測量,主要有兩種方式:接觸式和非接觸式。最常見的為非接觸式激光傳感器,它是利用激光技術進行測量的傳感器。它的優點是能實現無接觸遠距離測量,速度快,精度高,量程大,抗干擾能力強等。
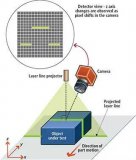
傳感器中激光發射器通過鏡頭將可見激光射向被測物體表面,經物體反射的激光通過接收器鏡頭,被內部的CCD線性相機接收,根據不同的距離,CCD線性相機可以在不同的角度下“看見”這個光點。根據這個角度及已知的激光和相機之間的距離,數字信號處理器就能計算出傳感器和被測物體之間的距離。
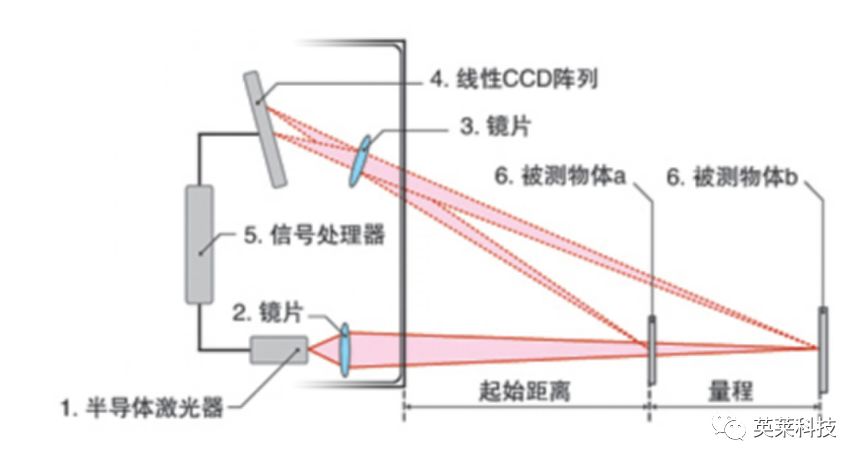
半導體激光器1被鏡片2聚焦到被測物體6上。反射光被鏡片3收集,投射到CMOS陣列4上;信號處理器5通過三角函數計算陣列4上的光點位置得到距物體的距離。
常見的激光三角測量法:
常用的激光傳感器測距則會用到激光三角測量法,其中最為常見的有傾斜式激光三角測距法和直射式激光三角測距法,下面我們分別做介紹:
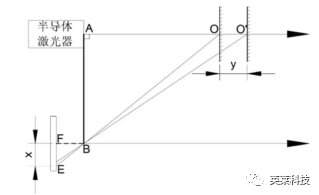
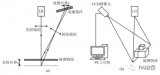
傾斜式激光三角測距法
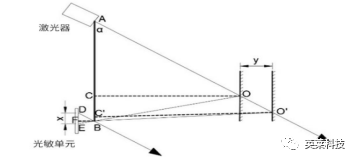
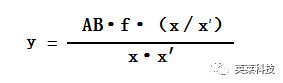
由上圖可知入射光AO與基線AB的夾角為α,AB為激光器中心與CCD中心的距離,BF為透鏡的焦距f,D為被測物體距離基線無窮遠處時反射光線在光敏單元上成像的極限位置。DE為光斑在光敏單元上偏離極限位置的位移,記為x。當系統的光路確定后,α、AB與f均為已知參數。由光路圖中的幾何關系可知△ABO∽△DEB,則有邊長關系:
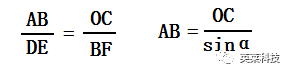
則易知:
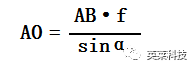
在確定系統的光路時,可將CCD位置傳感器的一個軸與基線AB平行(假設為y軸),則由通過算法得到的激光光點像素坐標為(Px,Py)可得到x的值為:

其中CellSize是光敏單元上單個像素的尺寸,DeviationValue是通過像素點計算的投影距離和實際投影距離x的偏差量。當被測物體與基線AB產生相對位移時,x改變為x′,由以上條件可得被測物體距離y為:
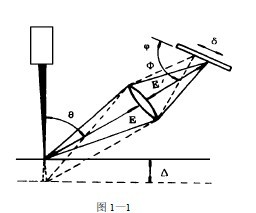
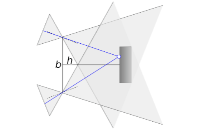
直射式激光三角測距法
如上圖所示, 當激光光束垂直入射被測物體表面, 即入射光線與被測物體表面法線共線時, 為直射式激光三角法。由光路圖,仿照斜射式激光三角測距法的結論可知:
斜射式和直射式激光三角測距法均可實現對被測物體的高精度、非接觸測量,但兩者之間存在區別,主要有以下幾點:
● 斜射式激光三角法成像的光斑較大,光強不集中, 隨入射角度的變化有差異, 體積比直射式大, 測量范圍小, 但直射式的分辨率沒有斜射式的高。
● 斜射式激光三角法在被測物體發生位移時, 被測物體上的光斑將照射在不同位置,對被測物體上某一定點, 無法確定其位移情況,而直射式的光斑與位置是一一對應的。
基于直射式激光三角法在幾何算法上更為簡單, 誤差較之斜射式小, 且體積可以設計得更為緊湊小巧, 故工程應用上常采用直射式激光三角法。
-
激光
+關注
關注
19文章
3131瀏覽量
64375 -
接收器
+關注
關注
14文章
2458瀏覽量
71808 -
激光器
+關注
關注
17文章
2492瀏覽量
60264 -
測距
+關注
關注
2文章
105瀏覽量
19619
原文標題:激光傳感器是如何工作的?淺析常用的三角測量法。
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
三角測量傳感器可實現很高的測量精度
Micro-Epsilon的激光三角測量傳感器為位移和距離測量設定了新標準
簡析激光三角測量技術的發展應用前景
如何配置基于激光的3D三角測量系統以及如何設置激光線參數
激光三角測量方法在不同場景的應用
二維激光掃描儀的兩種測量原理
小型激光位移傳感器激光測量原理
激光傳感器的激光三角測量法
應用于機器視覺的3D激光三角測量技術
基于激光的3D三角測量系統中激光線參數設置






 工商網監
工商網監
評論