 膠囊機器人是如何完成深度學習與算法訓練的?
膠囊機器人是如何完成深度學習與算法訓練的?
一顆膠囊大小的胃腸道內窺鏡機器人,被服下后,通過體外磁控的方式實現在消化道中的運動,途經食道、胃部、腸部,最后被人體排出。這個過程中,電腦可以同步顯示胃腸道的相關檢測數據,從而讓醫生有依據地完成診斷。
(圖片來源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS))
聽起來好像很簡單,而實際上膠囊機器人在投入使用前,必須先經過深度學習和訓練。就像游戲玩家出發去升級打怪需要游戲裝備和地圖一樣,膠囊機器人需要通過深度學習技術改善密集地形重建和姿態估計算法,以及通過SLAM( Simultaneous Localization and Mapping)同步定位與地圖構建的機器視覺技術實現檢測、識別能力。
通俗一點講,機器人不是人,它的視覺和決策能力,都需要研制者通過一些方法賦予給它。通過深度學習獲得的能力相當于膠囊機器人的大腦,而通過SLAM機器視覺獲得的就相當于膠囊機器人的“火眼金睛”。
2000年,以色列研制的第一個膠囊內鏡獲得FDA批準進入臨床,當時的膠囊機器人是隨消化道的自然蠕動而前進的,由于沒有經過深度學習訓練,也沒有SLAM技術的加持,有點像盲人摸象,對于像胃這樣大的消化道器官,其觀察范圍十分有限,因此會造成相當大的漏檢。

土耳其伊斯坦布爾的Bogazici大學的生物醫學工程專業,有一個專業的生物醫學實驗室,其研究領域包括生物醫學儀器、生物電子學、生物力學、神經信號分析、生物光子學、醫學成像、細胞成像和電生理學、機器人技術、醫療設備設計和測試,以及心理物理學等。
2020年,該實驗室的Mehmet Turan博士,通過TUBI TAK2232國際杰出研究人員研究金方案獲得了資金支持,開展了一項名為“磁性驅動的Al-Powered內窺鏡膠囊機器人用于靶向藥物傳遞和多活檢操作”的研究項目。該項目旨在利用人工智能的最新進展,在無線膠囊內窺鏡(WCE)機器人的機電一體化設計、遠程磁控以及定位和映射算法方面進行重大的科技創新。
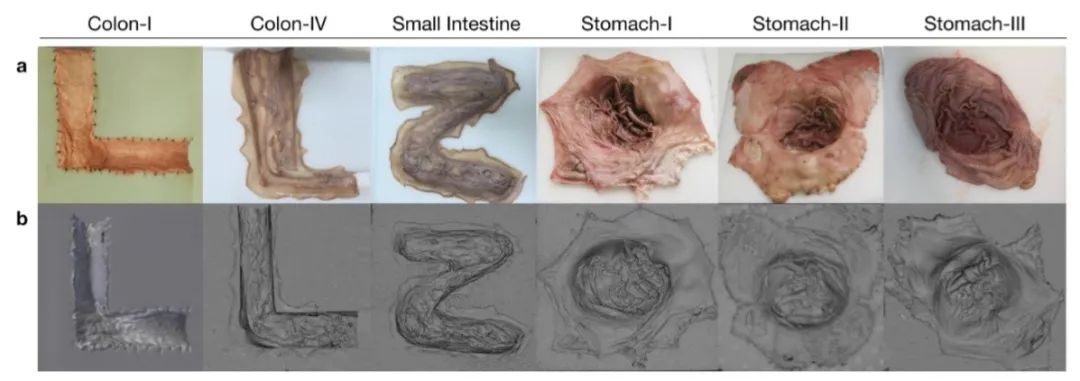
在該項目中,研究人員基于1個膠囊內鏡圖像的基礎SLAM數據集,1只Panda機械臂,1臺EinScan Pro 2X(先臨三維品牌的3D掃描儀),2個具有不同相機特性的商用膠囊機器人,對體外豬胃腸道的數據進行了采集,并完成了算法測試和膠囊機器人的深度學習與訓練。
研究人員把器官固定在六個支架上,創造出L形、Z形和O形三種胃腸道形態,以模擬通過升結腸到橫結腸的GI-牽引路徑。EinScan Pro 2X的功能就是3D掃描獲取這六個器官形態的點云數據。所收集的數據結果,需要滿足兩點:使SLAM數據集適合于遷移學習;此外,還可以對同一器官類型的具有不同紋理細節的組織進行算法性能測試。
由于被掃描的物體本身明暗多變,柔軟易變形,一開始并不順利。先臨三維的技術人員在了解項目情況后,為研究人員及時提供了3D掃描儀的操作指導,包括如何通過亮度調整應對明暗變化,如何使用標志點輔助數據高精度拼接,選擇哪一種無毒無害的醫用顯影劑可以幫助進一步改善數據細節,以及面對不同的情況如何選擇合適的掃描模式。
最終,我們很高興地看到,研究人員如愿以償獲取到了六組高精細的3D數據,如實記錄了器官所有結構、角落和深度。
然后,原始點云數據被進一步編輯,得到了色譜圖。
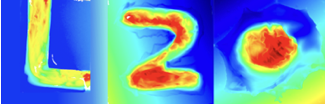
這些數據都被用于膠囊機器人的深度學習和算法訓練。Bogazici大學的研究人員使用膠囊內鏡圖像的基礎SLAM數據集作為輸入,然后利用此次3D掃描獲取的三維模型在SLAM數據集中確定定位。
研究組的Mehmet Turan博士說:“在以前的一個研究項目中,我使用過另一個品牌的3D掃描儀。那款3D掃描儀也很好,但是與EinScan Pro 2X相比,在分辨率和點精度上存在技術差異。點精度是我們此次項目實現深度學習過程的最重要因素之一,這就是為什么團隊最終決定依靠EinScan Pro 2X的能力來完成這個項目的原因。”
-
算法
+關注
關注
23文章
4601瀏覽量
92668 -
SLAM
+關注
關注
23文章
419瀏覽量
31789 -
深度學習
+關注
關注
73文章
5493瀏覽量
120992
原文標題:膠囊機器人是如何完成深度學習與算法訓練的?EinScan Pro 2X帶你了解SLAM機器視覺
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
機器人技術的發展趨勢
在NVIDIA Isaac Lab中訓練四足機器人運動

FPGA在人工智能中的應用有哪些?
谷歌借助Gemini AI系統深化對機器人的訓練
Al大模型機器人
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
探訪ABB中壓開關柜智能機器人裝配流水線的奧秘
廣和通發布機器人開發平臺
生醫應用的磁控膠囊機器人,實現多模態響應與多功能集成

星動紀元開源人形機器人訓練框架Humanoid-Gym
LabVIEW的六軸工業機器人運動控制系統
深度學習如何訓練出好的模型






 工商網監
工商網監
評論