") 基于平行運(yùn)動(dòng)學(xué)設(shè)計(jì)的N35壓電偏轉(zhuǎn)鏡的結(jié)合和特點(diǎn)分析
基于平行運(yùn)動(dòng)學(xué)設(shè)計(jì)的N35壓電偏轉(zhuǎn)鏡的結(jié)合和特點(diǎn)分析
N35系列壓電偏轉(zhuǎn)鏡,是一款定制型壓電精瞄鏡,與其他壓電偏轉(zhuǎn)鏡不同的是,它具有方形的外形結(jié)構(gòu)。該結(jié)構(gòu)使其更易于安裝固定。
特點(diǎn)
?θx、θy二維偏轉(zhuǎn) ?大角度偏轉(zhuǎn)達(dá)50mrad ?閉環(huán)分辨率達(dá)2μrad ?可選配閉環(huán)傳感器
結(jié)構(gòu)簡介
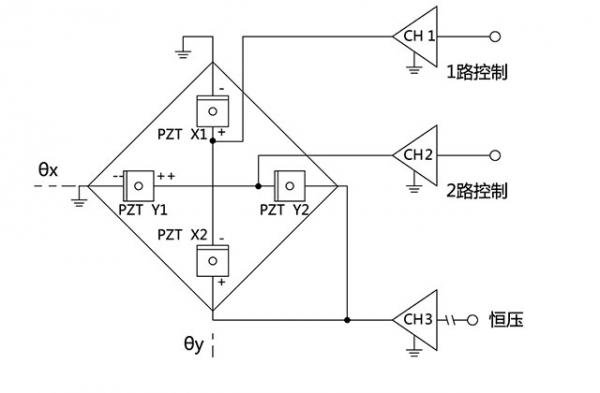
N35壓電偏轉(zhuǎn)鏡(兩軸運(yùn)動(dòng))是基于平行運(yùn)動(dòng)學(xué)設(shè)計(jì),具有共面軸及移動(dòng)面。四個(gè)執(zhí)行機(jī)構(gòu)(PZT壓電陶瓷驅(qū)動(dòng)器)以90°角平分放置,成對(duì)的差分控制分布。兩對(duì)差分驅(qū)動(dòng)壓電促動(dòng)器在較大溫度范圍內(nèi)提供最高可實(shí)現(xiàn)的角度穩(wěn)定性。它的偏擺運(yùn)動(dòng)是由兩對(duì)壓電促動(dòng)器以推拉模式來實(shí)現(xiàn),采用橋式連接電路控制。
高可靠性及長壽命、高穩(wěn)定性及動(dòng)態(tài)性
N35系列壓電偏轉(zhuǎn)鏡系統(tǒng)內(nèi)部裝配帶有預(yù)緊力的高可靠性壓電促動(dòng)器,被集成在經(jīng)過FEA建模分析的鉸鏈導(dǎo)向系統(tǒng)。壓電促動(dòng)器為疊堆共燒型壓電陶瓷,可提供更好的穩(wěn)定性及可靠性。壓電促動(dòng)器、導(dǎo)向機(jī)構(gòu)及傳感器是免維護(hù)的,不易損壞且提供超高的可靠性。
先進(jìn)的鉸鏈/杠桿設(shè)計(jì)將慣性最小化,允許50mrad的大角度俯仰/偏轉(zhuǎn)范圍(可將光束偏轉(zhuǎn) 100mrad),且具有非常快的響應(yīng)速度,在毫秒級(jí)范圍。
除了大偏轉(zhuǎn)角度及高動(dòng)態(tài),N35還提供了微弧度的分辨率。內(nèi)部集成高分辨率、全橋的應(yīng)變傳感器(SGS)實(shí)現(xiàn)了精確的位置控制,具有優(yōu)異的重復(fù)定位精度,通常為滿行程的0.02%。
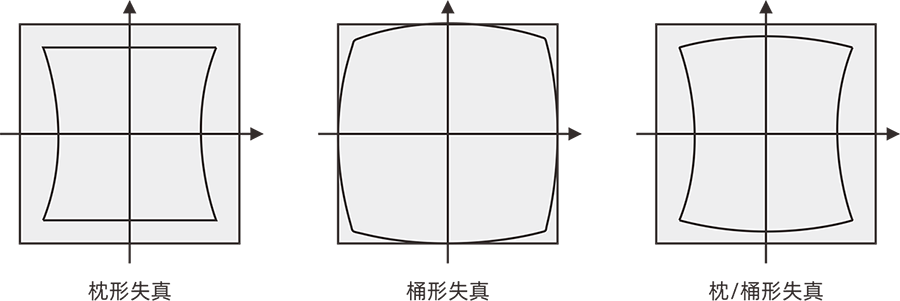
N35壓電偏轉(zhuǎn)鏡角度測(cè)量
技術(shù)參數(shù)
型號(hào):N35.T40S/K
運(yùn)動(dòng)自由度:θxθy
偏轉(zhuǎn)角度@120V:40mrad(≈8250秒)
偏轉(zhuǎn)角度@150V:50mrad(≈10300秒)
傳感器類型:SGS/-
閉/開環(huán)分辨率:2/1 μrad
閉環(huán)線性度:0.05%F.S.
閉環(huán)重復(fù)度:0.02%F.S.
空載諧振頻率:1300Hz
帶載諧振頻率(12.7mm×3mm鏡片):1050Hz
閉/開環(huán)階躍時(shí)間:1.4/1ms
靜電容量:14.5μF
材質(zhì):鈦合金
重量:223g
E70.D3S壓電控制器為小體積壓電控制器,具有3個(gè)輸出通道,可含一路恒壓輸出,非常適于驅(qū)動(dòng)N35系列壓電偏轉(zhuǎn)鏡。
責(zé)任編輯:gt
-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752143 -
控制器
+關(guān)注
關(guān)注
112文章
16214瀏覽量
177479 -
分辨率
+關(guān)注
關(guān)注
2文章
1051瀏覽量
41888
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦

壓電偏轉(zhuǎn)鏡-高頻光束轉(zhuǎn)向調(diào)節(jié)#芯明天 #偏轉(zhuǎn)鏡 #高頻光束
電磁軌跡預(yù)測(cè)分析軟件
電磁軌跡預(yù)測(cè)分析系統(tǒng)設(shè)計(jì)方案
電磁軌跡預(yù)測(cè)分析系統(tǒng)
plc可以進(jìn)行運(yùn)動(dòng)控制嗎
S31系列小體積壓電偏轉(zhuǎn)鏡應(yīng)用于高速、高精度光路偏轉(zhuǎn)調(diào)節(jié)!

幾種不同的光束偏轉(zhuǎn)系統(tǒng)對(duì)比
開放式激光振鏡運(yùn)動(dòng)控制器的視覺校正振鏡精度解決方案
壓電偏轉(zhuǎn)鏡在激光快速掃描系統(tǒng)控制中的應(yīng)用

P35A.U1S/K一維大負(fù)載壓電偏轉(zhuǎn)鏡,45°傾斜安裝!

機(jī)器人運(yùn)動(dòng)學(xué)中的非完整約束與運(yùn)動(dòng)模型推導(dǎo)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論