 科學家團隊創造 100 多萬個微型四腳機器人 尺寸小于 0.1 毫米
科學家團隊創造 100 多萬個微型四腳機器人 尺寸小于 0.1 毫米
我們眼前有一個微米尺度的機器人,大小和草履蟲差不多,肉眼看不見的那種。
顯微鏡下長這樣,可可愛愛沒有腦袋的它正在受激光的控制在液體中游動。
機器人大軍集合。
那么,要制造這樣小到極致的機器人,還要讓它順利移動,最難的部分是什么?
在這個問題上,科學家們的一個較為一致的答案是:微米級致動器系統(致動器可簡單理解為能讓機器人動起來的馬達)。
這一領域最近迎來了一個好消息:一組來自美國康奈爾大學 Kavli 生物納米科技研究所、康奈爾大學原子與固體物理實驗室、賓夕法尼亞大學電氣與系統工程系、康奈爾大學應用與工程物理系的科學家團隊開發出了一種新型的致動器,并在此基礎上創造了 100 多萬個微型四腳機器人,這也是迄今為止首批尺寸小于 0.1 毫米的機器人。
2020 年 8 月 26 日,該團隊以 Electronically integrated, mass-manufactured, microscopic robots(電子集成批量制造微型機器人)為題的研究成果發表于知名學術期刊《自然》。
微電子研究的新世界大門
在微電子學領域,摩爾定律的擴展為微型機器人領域帶來了巨大機遇——電子、磁和光學系統提供了一個前所未有的復雜性高、尺寸小、成本低的組合,可以較為容易地用于小于人類視覺分辨率極限(100 微米)的機器人。
然而,一個主要障礙是:不存在與半導體處理無縫集成并響應標準電子控制信號的微米級致動器系統。
為克服這一障礙,研究團隊開發了一種新型電壓可控電化學致動器,它能在低電壓(200 微伏)、低功率(10 納瓦)下操作,可與硅處理完全兼容。
為彰顯這種新型致動器的潛力,研究團隊通過光刻技術制造了微型機器人。
每 4 英寸的晶圓就能生產 100 余萬個機器人,而每個機器人的尺寸也是讓人驚掉下巴——厚約 5 微米、寬約 40 微米、長為 40-70 微米。
這一成就激發出了驅動器與微電子電路集成的巨大潛力,對于大規模制造硅基功能機器人來說是一個重要的進步。
正因如此,《自然》對這種微型機器人的評價是:
為過去 50 年的微電子研究打開了新世界的大門。
可受激光控制在液體中游動
實際上,這種制造技術與芯片一致的機器人還有一項特殊功能:受激光控制,在液體中游動。
據《自然》報道,要想設計一款在液體環境中可移動的微型機器人并不容易,原因顯而易見——微米尺度的物體想要前進,將面臨強大的阻力。
好在該團隊開發的致動器派上了用場。
原理是,團隊使用原子層沉積和光刻技術,用厚度僅為幾十個原子的鉑條制造了致動器,其一側被一層惰性鈦覆蓋。
研究團隊將四個致動器設計成機器人的四條腿,在對其施加正電荷時,帶負電的離子將從周圍溶液中吸附到暴露的表面上中和電荷,因此鉑會膨脹產生彎曲,但同時其具有超薄特性,材料急劇彎曲也不會斷裂,保證機器人能在浸沒于水的凹凸不平表面上動起來。
為控制機器人的 3D 肢體運動,研究團隊還在致動器頂部設計了剛性聚合物面板,面板之間有一定的間隙,功能就類似人體的膝蓋或腳踝。
而且,向前或向后移動的方向不同,四條腿扭轉的程度也不同。
不僅如此,機器人的四條腿連接著位于中部底盤(可以理解為機器人的軀干)的幾個光伏貼片(太陽能電池)上。
當激光照射在貼片上時,四條腿也將彎曲、伸直。而通過不同貼片上的閃爍激光脈沖,機器人受到控制,前后腿就會交替彎曲,因此開始移動。
一定程度上,這種創新性設計對于其他微電機的推進機制也有參考價值。比如,雖然要考慮到特定的化學環境、能源轉化為運動的效率等等,但自電泳微型電動機也可通過連接到機載電路的電流供電。
如何克服制造微型機器人的技術挑戰?
雷鋒網(公眾號:雷鋒網)了解到,面對微型機器人制造的技術挑戰,科學家目前有兩種策略。
第一種是能反映遠程能量供應和認知功能的設計,它被稱為「牽線木偶」(marionette)。
這種設計包含電源,計算或決策組件與機器人本身分離。
其優勢在于,無需集成機載電源和計算電路就可以測試功能組件;而缺點是必須始終將機器人“束縛”在能量源上。
不難看出,上述微型機器人正是屬于這一類設計,原因在于研究人員是通過照在光伏貼片上的激光來提供指令的。
第二種策略是構建完全不受任何束縛的自主設備。微型機器人已經結合了能量存儲技術或從環境中清除能量的方法,但考慮到能量存儲、計算能力和小規模制造方法的局限性,自主設備在實現微型化的同時又不失“智能”的能力,還有待觀察。
雖然微型機器人未來還有很大的發展空間,但這項研究的意義無疑是重大的。未來微型機器人會的不應僅局限于「游泳」,更重要的是通過傳感器和邏輯電路的輸入遵循更為高級的指令。
部分內容來源于互聯網,版權屬于原作者。如構成侵權,請聯系我們,我們將盡快處理。
原文標題:激光驅動的機器人大軍!Nature:機器人尺寸小于 0.1 毫米,4 英寸晶圓可容納 100 余萬個
文章出處:【微信公眾號:天津機器人】歡迎添加關注!文章轉載請注明出處。
-
機器人
+關注
關注
210文章
28205瀏覽量
206525 -
微型機器人
+關注
關注
0文章
111瀏覽量
19534
原文標題:激光驅動的機器人大軍!Nature:機器人尺寸小于 0.1 毫米,4 英寸晶圓可容納 100 余萬個
文章出處:【微信號:tjrobot,微信公眾號:天津機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
Jim Fan展望:機器人領域即將迎來GPT-3式突破
AMD贊助多支FIRST機器人競賽團隊
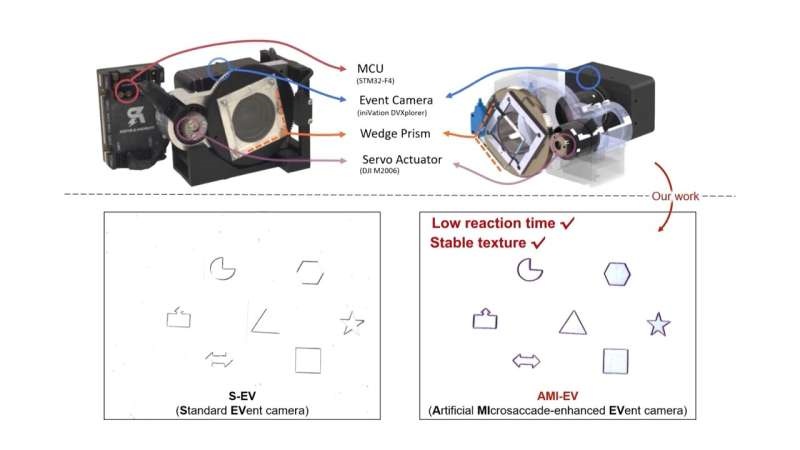
受人眼啟發!科學家開發出新型改良相機
天津大學科學家突破人類大腦器官成功驅動機器人
北航成功研發微尺寸仿生機器人——昆蟲機器人
捷克研發微型機器人,捕獲水中塑料廢物及細菌
兩腳晶振和四腳晶振在使用電路上有什么區別嗎
請問四腳有源晶振怎么使用?
科學家研發仿生小鼠機器人,可用于災后救援和探測檢修等領域






 工商網監
工商網監
評論