 步進電機驅動方式及實現代碼
步進電機驅動方式及實現代碼
一、大致介紹:
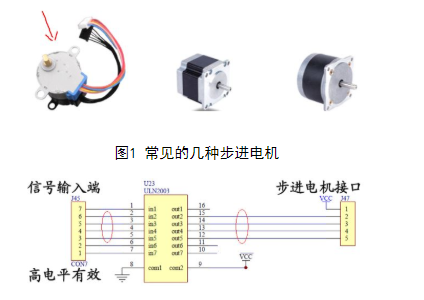
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,稱為“步距角”,它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。

二、常用術語
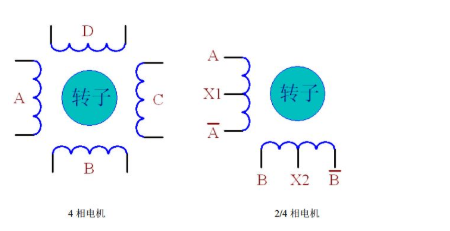
1、相數:產生不同對極N、S磁場的激磁線圈對數。常用m表示。
2、拍數:完成一個磁場周期性變化所需脈沖數或導電狀態用n表示,或指電機轉過一個齒距角所需脈沖數,以四相電機為例,有四相四拍運行方式即AB-BC-CD-DA-AB,四相八拍運行方式即 A-AB-B-BC-C-CD-D-DA-A。
3、步距角:對應一個脈沖信號,電機轉子轉過的角位移用θ表示。θ=360度/(轉子齒數*運行拍數),以常規二、四相,轉子齒為50齒電機為例。四拍運行時步距角為θ=360度/(50*4)=1.8度(俗稱整步),八拍運行時步距角為θ=360度/(50*8)=0.9度(俗稱半步)。
三、驅動方式
1、1相勵磁法:每一瞬間只有一個線圈相通,其它休息。(優點)簡單,耗電低,精確性良好。(缺點)力矩小,振動大,每次勵磁信號走的角度都是標稱角度。
2、2相勵磁法:每一瞬間有兩個線圈導通。(優點)力矩大,震動小。(缺點)每勵磁信號走的角度都是標稱角度。
3、1-2相勵磁法:1相和2相交替導通。(優點)精度較高,運轉平滑,每送一個勵磁信號轉動1/2標稱角度,稱為半步驅動。(前兩種稱為4相4拍,這一種稱為4相8拍)
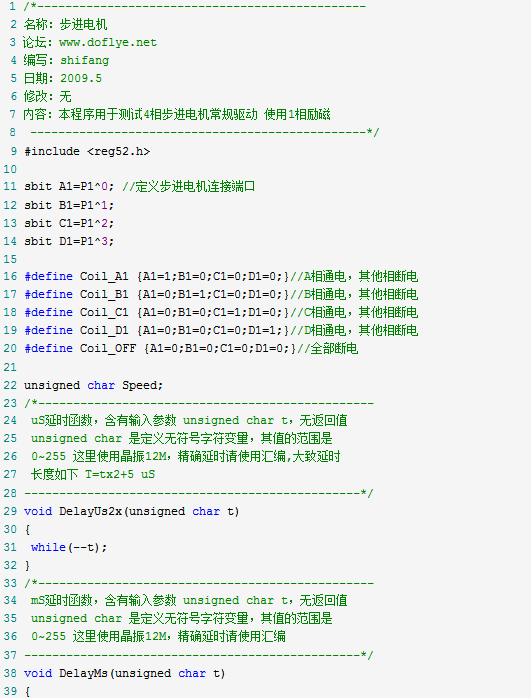
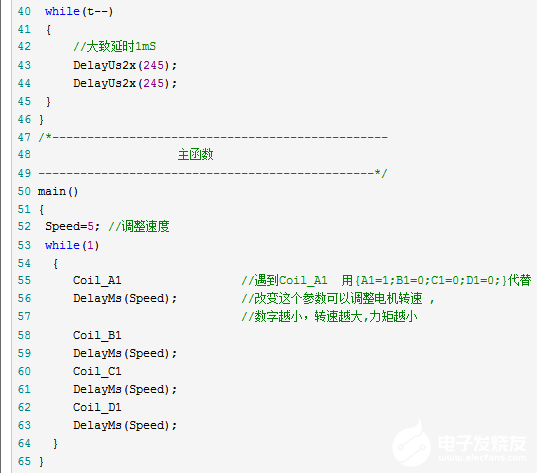
三、代碼
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
步進電機
+關注
關注
150文章
3095瀏覽量
147346 -
脈沖信號
+關注
關注
6文章
394瀏覽量
36916 -
控制電機
+關注
關注
0文章
235瀏覽量
18081
發布評論請先 登錄
相關推薦
步進電機驅動器的主要驅動方式有哪些?簡單介紹
的轉速和步數。脈沖驅動方式具有結構簡單、控制方便等優點,適用于對精度要求不高的場合。 相序控制方式 相序控制方式是步進
步進電機如何自適應控制?步進電機如何細分驅動控制?
步進電機是一種將電脈沖信號轉換為角位移或線位移的電機,廣泛應用于各種自動化控制系統中。為了提高步進電機的性能,自適應控制和細分
步進電機驅動芯片大電流怎么調
磁場,進而驅動轉子轉動。步進電機的角位移與輸入的脈沖信號成正比,因此可以通過控制脈沖信號的數量和頻率來實現對電機的精確控制。 電流對
步進電機a+a-b+b-如何改變方向
步進電機是一種將電脈沖信號轉換為機械角位移的執行元件,廣泛應用于自動化設備、機器人、數控機床等領域。步進電機的工作原理是通過控制電機內部的線
arduino控制步進電機代碼
中,我們將詳細介紹如何使用Arduino來控制步進電機的代碼。 步進電機通常用于需要精確控制角度和位置的應用中,例如3D打印機、數控銑床和機
步進電機的微步驅動原理是什么
地移動,并能夠實現更精確的定位。 微步驅動原理的核心在于對繞組電流的精細控制。在傳統的步進電機操作中,繞組通常被全開或全關,對應于一個特定的極性方向,從而產生足夠的力矩使





 工商網監
工商網監
評論