 HIP4082電機驅動電路設計分析
HIP4082電機驅動電路設計分析
(原文作者CSDN博主「萬樹不會古冬u」 在此特別鳴謝!~)
一、原理圖
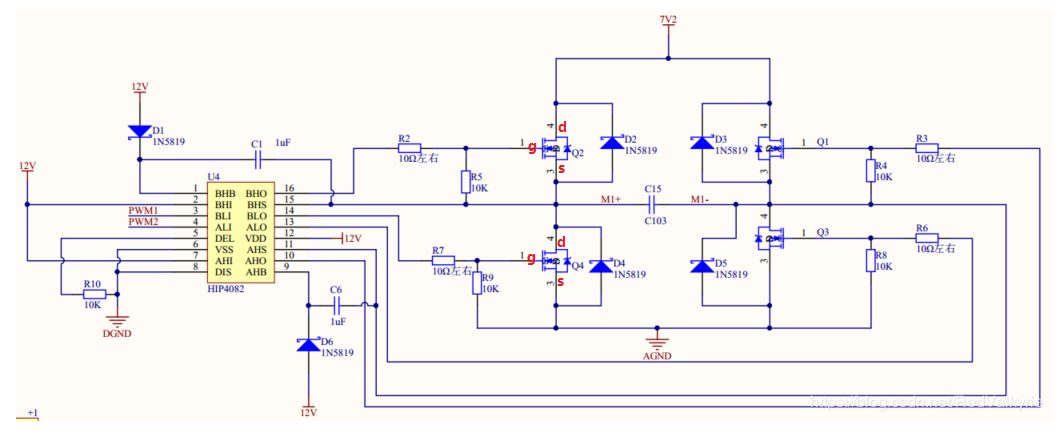
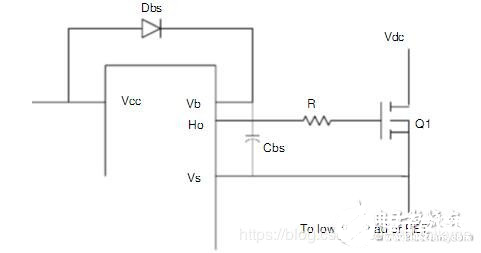
以下內容是我在14屆小白四輪組里使用到的驅動原理圖,因為突然回顧以前做過的這個驅動電路,所以記錄一下防止遺忘。以下只列出以下主要電路:
二、化簡電路再做分析的前提
前提,我們先明確以下知識點,再來把無關器件省略掉,分析主干電路。
MOS管導通的實質是對GS結電容充電,在上圖所示的原理圖我在G級串聯一個電阻是為了限制充電速度,防止充電過快產生震蕩。
柵極電阻一般串聯一個10歐左右的電阻,GS級之間一般并聯一個10K的電阻用來關斷期間結電容的放電。
與MOS管并聯的二極管是不必要的,因為MOS管內部集成了二極管,即體二極管。
在不考慮串聯的10歐姆左右的電阻以及GS級并聯的10K歐姆的電阻,還有MOS管外面另外并聯的二極管,電路簡化至下圖作分析:
三、分析一下自己的理解
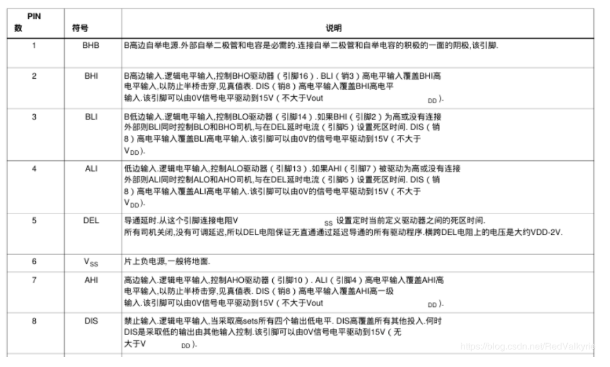
《 1 》 引腳說明
《 2 》 MOS管的高端驅動和低端驅動
所謂的高邊驅動或者低邊驅動,指的是在電子電路驅動負載時,當需要控制開關時,開關所處電路的位置。“高”指的是“電源”,“低”指的是“地”。
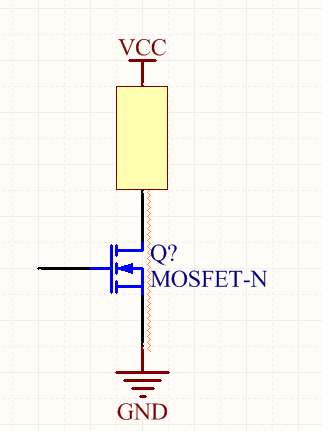
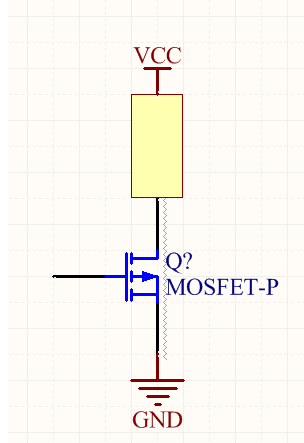
低邊驅動簡單的理解為:負載的一端默認與電路的正級即電源保持連接,負載的另一端與開關連接,當開關導通時,負載的另一端與地連接,負載開始工作,當開關與關斷時,負載的另一端與地斷開,負載停止工作。低邊驅動/開關英文:Low Side Drivers,簡稱為LSD。具體到使用MOS管作為開關的情況的時候,MOS管相對于負載在電勢的低端,其中D通過負載接電源,S直接接地。
對于NMOS管,只有當Vgs大于開啟電壓時,MOS管才能導通。所以當未導通時,S處于一個不能確定的電位。若讓Vgs大于開啟電壓,則DS導通,S確定為地電位,此時仍可以保證Vgs大于開啟電壓,保持DS導通。
對于PMOS管,只有到Vgs小于一個值,MOS才能導通。此時S處于一個不確定的電位。若讓Vgs小于開啟電壓,即使導通了,S確定下降到地電位,就不能保證Vgs小于開啟電壓。
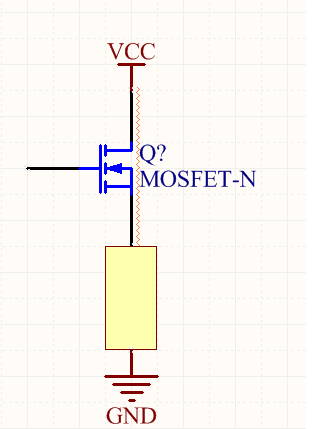
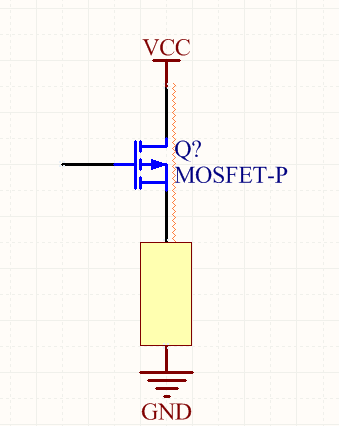
高邊驅動簡單的理解為:負載的一端默認與電路的負級即地保持連接,負載的另一端與開關連接,當開關導通時,負載的另一端與電源連接,負載開始工作,當開關與關斷時,負載的另一端與電源斷開,負載停止工作。高邊驅動/開關英文:High Side Drivers,簡稱為HSD;具體到使用MOS管作為開關的情況的時候,MOS管相對于負載在電勢的高端,其中D直接連接電源,S通過負載接地。
對于NMOS,只有當Vgs大于開啟電壓時,MOS管才能導通。所以當未導通時,S處于一個不能確定的電位。即使讓Vgs大于開啟電壓,DS導通后,DS電位相等,同為電源電位,除非G極電位比電源電位還高,則不能保持導通狀態。
對于PMOS,只有到Vgs小于一個值,MOS才能導通。此時S處于一個不確定的電位。若讓Vgs小于開啟電壓,使DS導通,DS同為電源電位,還是能保持Vgs小于開啟電壓,是MOS保持導通狀態。
總結:PMOS適合作為高端驅動,NMOS適合作為低端驅動。但是由于工藝等各方面的原因。在大電流情況下,通常仍把NMOS作為高端驅動。于是,為了保證高端驅動的NMOS的Vgs保持大于開啟電壓。我們會使用半橋驅動芯片。半橋驅動芯片把高端驅動的NMOS的S極作為參考地,輸出一個恒定的開啟電壓,來控制MOS的導通。
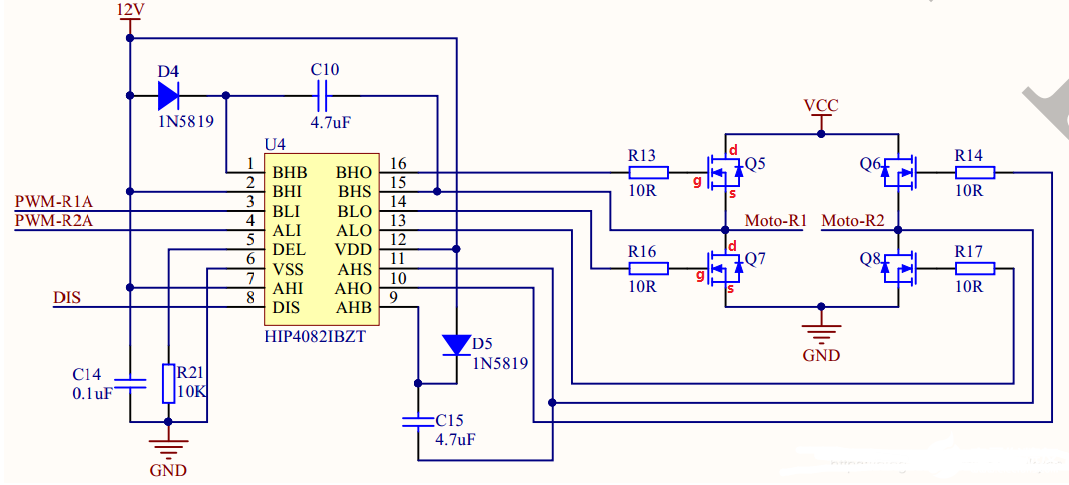
《 3 》 電機驅動電路分析
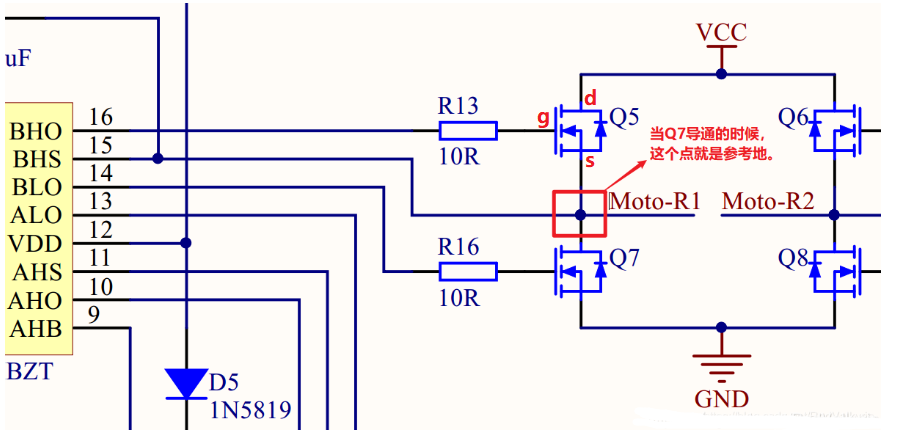
如上圖所示電機驅動原理圖,我采用的是HIP4082全橋驅動芯片。將高端驅動的NMOS作為參考地。
因為我們是用的是NMOS管,所以當Ugs的電壓大于開啟電壓,MOS管才被導通,而我在此處采用的自舉的方式,輸出一個恒定的開啟電壓,來控制MOS管導通。
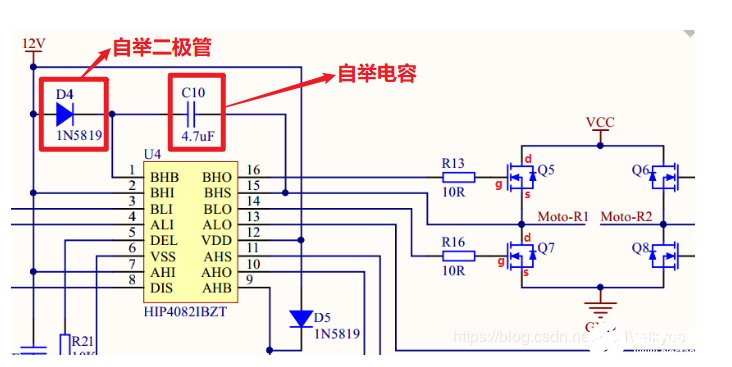
下面解釋一下,在HIP4082驅動芯片這邊的自舉電路原理:
首先BHS引腳里的HS指的是High S極,也就是上管Q5的S極,可以看到此處下管Q7的S極是接地的,所以如果下管Q7處于導通狀態的時候,BHS引腳,也就是上管Q5的S極就相當于接地了,這時BHS的電壓也就是上圖Q5的S極的電壓。
這個時候,外部電源通過自舉二極管向自舉電容充電。
在處于目前下管Q7導通,上管Q5關閉的狀態的時候,此時外部電源通過二極管和自舉電容給電容充電,然后BHB和BHO引腳處于短接狀態,此時上端MOS管Q5導通。
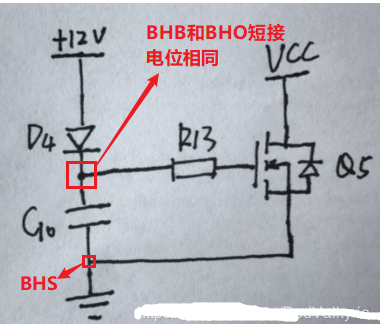
我們先假設這里C10充滿電就是12V,因為BHB和BHO短路,此時自舉電容充的電就通過BHS舉給了BHO,所以BHB和BHO的電壓是一樣的。然后此時Q5的S級接地,忽略掉R13的時候電壓約為12V,相當于Vgs之間是接了一個恒定的電壓來保持這里NMOS管的必然導通。此處就是通過自舉出來一個恒定的電壓來確保Vgs的電壓大于MOS管的導通電壓解決了上面提到的當NMOS為高端驅動時的導通狀態不確定的問題。
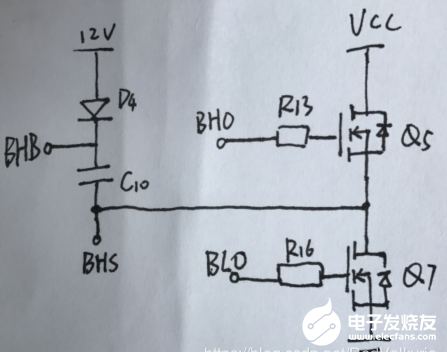
經過以上環節之后,上管Q5導通,下管Q7關閉,此時BHB和BHO就不處于短接的狀態了,由于電容充滿電了,BHB的電壓是比BHS的電壓高的。此時我手繪了一下電路如下圖:
以上就是自舉電路的原理。
值得注意的是:
正是因為這里自舉電容只能在下管Q7導通的時候充電,所以一般的NMOS橋驅動都不能輸出百分之百的占空比。你可以這么理解,就是此時電容里的電是維持上管Q5持續導通的,比如我假設的這里電容充滿電之后電壓是12V,但是總有時候電容里的電是會放光的,此時自舉電容電沒了就舉不動了,這個時候上管Q5就關閉了,而這個過程是慢慢的,可能會導致上管的G極電壓出現非飽和區和截止區,造成上管gg,所以一般限制占空比最高在 95% 到 98%95\% 到 98\%95% 到 98% 。然后上管Q5關閉之后,Q7導通,繼續給電容重新充電。然后循環這個過程。
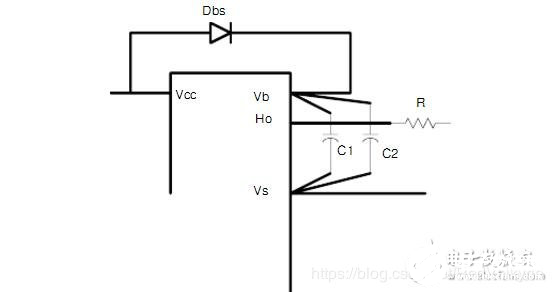
上圖只是我們使用的某一款驅動芯片,下面列出的是通用解釋自舉電路內部原理的圖,其中Vbs(驅動電路Vb和Vs管腳之間的電壓差)給集成電路高端驅動電路提供電源。該電源電壓必須在10-20V 之間,以確保驅動集成電路能夠完全地驅動MOS柵極器件。Vbs電源是懸浮電源,附加在Vs電壓之上(Vs通常是一個高頻的方波)。有許多方法可以產生Vbs懸浮電源,其中一種如本文中介紹的自舉方式。這種方式的好處是簡單、低廉,但也有局限性。占空比和開通時間受限于自舉電容的再充電(長時間導通和大占空比時要求有充電泵電路支持,詳見AN-978C了解):
對于含有自舉電路的PCB布板方法,需要注意自舉電容要盡可能靠近IC的管腳。如下圖所示,至少有一個低ESR的電容提供就近耦合。例如:如果使用了鋁電解電容做為自舉電容,就應再用一個瓷電電容。如果自舉電容是瓷電或鉭電容,自己作為就地耦合也就足夠了。
《 4 》 具體到通過PWM控制電機占空比
首先列出HIP4082芯片引腳的真值表:
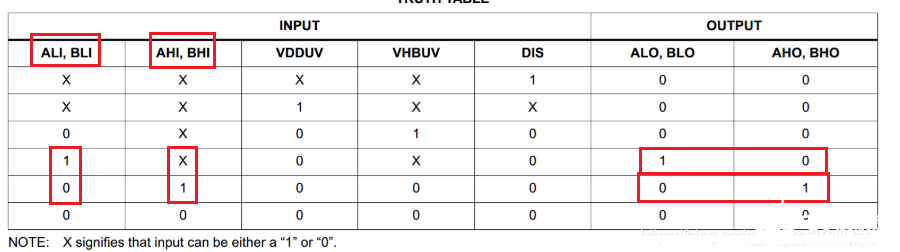
首先看看DIS引腳,這個引腳的作用是控制芯片是否工作的。我當初接的是低電平,也就是芯片一直保持工作。但是它也可以接一個IO口,讓GPIO輸出高電平或者低電平來控制芯片是否工作。
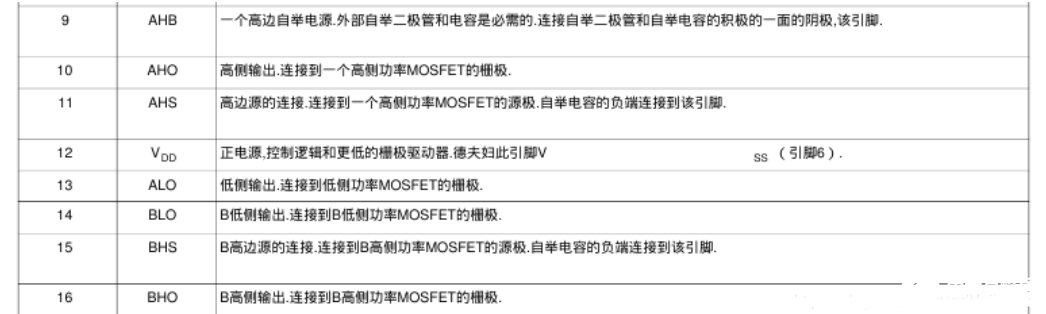
再看BHO和BLO的引腳,我的理解是,B表示這個芯片控制的其中一個半橋的引腳開頭字符,A就是另外一個半橋引腳的開頭字符,H(high)表示的上管,L(low)表示的是下管,O表示的是ON,也就是打開的意思。通過真值表我們可以看到,這里以B開頭的半橋引腳為例:
當BLI為高電平的時候,意思也就是比如我現在給的 90%90\%90% 的占空比,他處于高電平的那段時間,此時無論BHI接的什么電平,此處接的是12V高電平,這個時候下管是關閉的,上管是導通的,也就是這段時間用來給電機以 90%90\%90% 的占空比輸出。
當BLI為低電平的時候,也就是 90%90\%90% 占空比的另外 10%10\%10%處于低電平的時間段,若BHI為高電平的時候,此時上管關閉,下管導通,也就是這段時間去給自舉電容充電。
-----------------------------------------
版權聲明:本文為CSDN博主「萬樹不會古冬u」的原創文章,遵循CC 4.0 BY-SA版權協議,轉載請附上原文出處鏈接及本聲明。
原文鏈接:https://blog.csdn.net/RedValkyrie/article/details/105463217
-
二極管
+關注
關注
147文章
9576瀏覽量
165947 -
MOS管
+關注
關注
108文章
2396瀏覽量
66617 -
電機驅動
+關注
關注
60文章
1207瀏覽量
86628 -
柵極電阻
+關注
關注
0文章
40瀏覽量
13117
發布評論請先 登錄
相關推薦
A DC-AC Isolated Battery Inverter Using the HIP4082
求教 如何用HIP4082 驅動12V以上的電機
HIP4082電機驅動電路詳解 精選資料分享
在PWM管腳充足下是如何控制電機的
如何用HIP4082設計一個獨立電池DC-DC轉換器
十六屆全向組硬件開源(二)

高精度小型工業機器人控制
HIP4082電機驅動電路詳解





 工商網監
工商網監
評論