") 軟件定時器實(shí)現(xiàn)原理、測試及應(yīng)用設(shè)計(jì)
軟件定時器實(shí)現(xiàn)原理、測試及應(yīng)用設(shè)計(jì)
分析μC/OSII操作系統(tǒng)軟件定時器的算法,以及影響定時器精度的抖動問題產(chǎn)生的原因;提出定時器管理任務(wù)處理器占用率的計(jì)算公式,并進(jìn)行了實(shí)驗(yàn)測試。實(shí)驗(yàn)結(jié)果表明,μC/OSII軟件定時器具有ms級的最小分辨時間單位,運(yùn)行時間誤差在μs級,處理器開銷很小。
引言
μC/OSII操作系統(tǒng)是建立在微內(nèi)核基礎(chǔ)上的實(shí)時操作系統(tǒng),搶占式多任務(wù)、微內(nèi)核、移植性好等特點(diǎn),使其在諸多領(lǐng)域都有較好的應(yīng)用。
在μC/OSII 2.83及其以后的版本中,一個較大的變化就是增加了對軟件定時器的支持。這使得μC/OS實(shí)時操作系統(tǒng)的功能更加完善,在其上的應(yīng)用程序開發(fā)與移植也更加方便。在實(shí)時操作系統(tǒng)中一個好的軟件定時器實(shí)現(xiàn)要求有較高的精度、較小的處理器開銷,且占用較少的存儲器資源。本文在對μC/OSII定時器算法分析的基礎(chǔ)上,對定時精度和處理器占用情況進(jìn)行了分析與測試,其結(jié)果在實(shí)時系統(tǒng)的設(shè)計(jì)與應(yīng)用中具有借鑒意義。
1 定時器實(shí)現(xiàn)架構(gòu)
在μC/OSII操作系統(tǒng)內(nèi)部,任務(wù)的延時功能及軟件定時器功能,都需要底層有一個硬件的計(jì)數(shù)器支持。硬件計(jì)數(shù)器以固定的頻率遞減,計(jì)數(shù)到0 時,觸發(fā)時鐘中斷。這個特定的周期性的中斷稱為“時鐘節(jié)拍”。每當(dāng)有時鐘節(jié)拍到來時,系統(tǒng)在保存現(xiàn)場和中斷嵌套計(jì)數(shù)加1后都會跳到時鐘節(jié)拍函數(shù) OSTimTick()中,進(jìn)行軟件計(jì)數(shù)器加1和遍歷任務(wù)控制塊,以判斷任務(wù)延時是否到時。
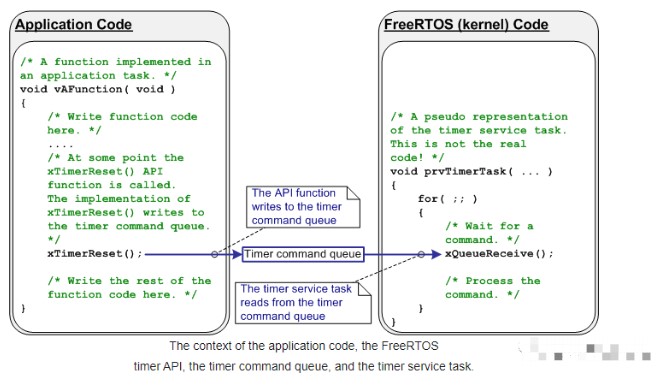
μC/OSII中并未在OSTimTick()中進(jìn)行定時器到時判斷與處理,而是創(chuàng)建了一個高于應(yīng)用程序中所有其他任務(wù)優(yōu)先級的定時器管理任務(wù) OSTmr_Task(),在這個任務(wù)中進(jìn)行定時器的到時判斷和處理。時鐘節(jié)拍函數(shù)通過信號量給這個高優(yōu)先級任務(wù)發(fā)信號。這種方法縮短了中斷服務(wù)程序的執(zhí)行時間,但也使得定時器到時處理函數(shù)的響應(yīng)受到中斷退出時恢復(fù)現(xiàn)場和任務(wù)切換的影響。
軟件定時器功能實(shí)現(xiàn)代碼存放在tmr.c文件中,移植時需只需在os_cfg.h.文件中使能定時器和設(shè)定定時器的相關(guān)參數(shù)。
2 μC/OSII的軟件定時器算法分析
μC/OSII中軟件定時器的實(shí)現(xiàn)方法是,將定時器按定時時間分組,使得每次時鐘節(jié)拍到來時只對部分定時器進(jìn)行比較操作,縮短了每次處理的時間。但這就需要動態(tài)地維護(hù)一個定時器組。定時器組的維護(hù)只是在每次定時器到時時才發(fā)生,而且定時器從組中移除和再插入操作不需要排序。這是一種比較高效的算法,減少了維護(hù)所需的操作時間。
2.1 定時器管理所需的數(shù)據(jù)結(jié)構(gòu)
一旦定時器被建立,一個定時器控制塊(OS_TMR)就被賦值了。定時器控制塊是定時器管理的基本單元,包含定時器的名稱、定時時間、在鏈表中的位置、使用狀態(tài)、使用方式,以及到時回調(diào)函數(shù)及其參數(shù)等基本信息。
在μC/OSII軟件定時器中實(shí)現(xiàn)了3類鏈表的維護(hù):
OS_TMROSTmrTbl[OS_TMR_CFG_MAX];
OS_TMR*OSTmrFreeList;
OS_TMR_WHEELOSTmrWheelTbl[OS_TMR_CFG_WHEEL_SIZE];
OSTmrTbl[OS_TMR_CFG_MAX]:以數(shù)組的形式靜態(tài)分配定時器控制塊所需的RAM空間,并存儲所有已建立的定時器控制塊。
OSTmrFreeList:為空閑定時器控制塊鏈表頭指針。空閑態(tài)的定時器控制塊(OS_TMR)中,OSTmrnext和 OSTmrPrev兩個指針分別指向空閑控制塊的前一個和后一個,組織了空閑控制塊雙向鏈表。建立定時器時,從這個鏈表中搜索空閑定時器控制塊。
OSTmrWheelTbl[OS_TMR_CFG_WHEEL_SIZE]:該數(shù)組的每個元素都是已開啟定時器的一個分組,元素中記錄了指向該分組中第一個定時器控制塊的指針,以及定時器控制塊的個數(shù)。運(yùn)行態(tài)的定時器控制塊(OS_TMR)中,OSTmrnext和OSTmrPrev兩個指針同樣也組織了所在分組中定時器控制塊的雙向鏈表。
定時器管理所需的數(shù)據(jù)結(jié)構(gòu)示意圖如圖1所示。
圖1 定時器管理所需數(shù)據(jù)結(jié)構(gòu)示意圖
2.2 軟件定時器實(shí)現(xiàn)原理
宏OS_TMR_CFG_WHEEL_SIZE定義了OSTmrWheelTbl[]數(shù)組的大小,同時這個值也是定時器分組的依據(jù)。按照定時器到時值與OS_TMR_CFG_WHEEL_SIZE相除的余數(shù)進(jìn)行分組:不同余數(shù)的定時器放在不同分組中;相同余數(shù)的定時器處在同一組中,由雙向鏈表連接。這樣,余數(shù)值為0~OS_TMR_CFG_WHEEL_SIZE-1的不同定時器控制塊,正好分別對應(yīng)了數(shù)組元素 OSTmrWheelTbl[0]~OSTmrWheelTbl[OS_TMR_CFG_WHEEL_SIZE-1]的不同分組。每次時鐘節(jié)拍到來時,時鐘數(shù)OSTmrTime值加1,然后也進(jìn)行求余操作,只有余數(shù)相同的那組定時器才有可能到時,所以只對該組定時器進(jìn)行判斷。這種方法比循環(huán)判斷所有定時器更高效。隨著時鐘數(shù)的累加,處理的分組也由0~OS_TMR_CFG_WHE EL_SIZE-1循環(huán)。
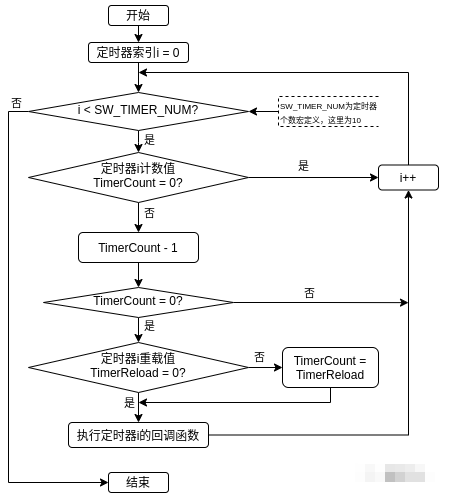
信號量喚醒定時器管理任務(wù),計(jì)算出當(dāng)前所要處理的分組后,程序遍歷該分組中的所有控制塊,將當(dāng)前OSTmrTime值與定時器控制塊中的到時值相比較。若相等(即到時),則調(diào)用該定時器到時回調(diào)函數(shù);若不相等,則判斷該組中下一個定時器控制塊。如此操作,直到該分組鏈表的結(jié)尾。定時器管理任務(wù)的流程如圖2所示。
OS_TMR_CFG_WHEEL_SIZE的取值推薦為2的N次方,以便采用移位操作計(jì)算余數(shù),縮短處理時間。
圖2 定時器管理任務(wù)流程
2.3 定時器移除和插入操作
定時器的到時處理函數(shù)返回后,都要進(jìn)行該定時器控制塊在鏈表中的移除和再插入操作。插入前需要重新計(jì)算定時器下次到時時所處的分組。計(jì)算公式如下:
定時器下次到時的OSTmrTime值=定時器定時值+當(dāng)前OSTmrTime值
新的分組=定時器下次到時的OSTmrTime值%OS_TMR_CFG_WHEEL_SIZE
3 定時器精度與抖動
在μC/OSII操作系統(tǒng)中,與定時相關(guān)的功能均基于系統(tǒng)的時鐘節(jié)拍。系統(tǒng)每秒的時鐘節(jié)拍數(shù)決定了這個系統(tǒng)能分辨的最小時間,定時值只能為最小時間的倍數(shù)。每秒的時鐘節(jié)拍數(shù)由os_cfg.h.文件中的宏OS_TICKS_PER_SEC定義。對于不同的應(yīng)用,該時鐘節(jié)拍一般在10~100 次/s的范圍內(nèi)選取。其對應(yīng)的時鐘中斷的時間間隔為100~10 ms ,即時間的最小分辨單位為10 ms。處理器處理能力越高,每秒的時鐘節(jié)拍數(shù)也相應(yīng)地越大。下面的數(shù)據(jù)測試中使用了ARM9處理器。最低運(yùn)行頻率為250 Hz時,時鐘節(jié)拍設(shè)為200 次/s,可進(jìn)行正常的多任務(wù)調(diào)度。該測試環(huán)境下,最小分辨時間為5 ms。
抖動是指定時器回調(diào)函數(shù)開始執(zhí)行的時間與規(guī)定的時間相比,或提前或推后的現(xiàn)象。在定時器中抖動總是存在的。下面主要分析2種抖動情況及其對定時精度的影響。第1種抖動情況如圖3所示。
圖3 第1種抖動情況
T1: CPU響應(yīng)時鐘中斷,搜索中斷號,保存中斷現(xiàn)場并跳到時鐘中斷處理程序OSTimTick的時間。
T2: OSTimTick()函數(shù)的執(zhí)行時間。該函數(shù)中對任務(wù)延時是否到期進(jìn)行了判斷。
T3: 恢復(fù)現(xiàn)場,退出中斷并進(jìn)行任務(wù)上下文切換的時間。
T4: 定時器管理任務(wù)OSTmr_Task()判斷定時器是否到時的時間。
T4之后: 定時器到時回調(diào)函數(shù)開始執(zhí)行。
在CPU運(yùn)行頻率固定的情況下T1和T3的執(zhí)行時間是相對固定的,而且一般為匯編語言實(shí)現(xiàn),運(yùn)行速度也較快。而T2和T4的時間會隨著任務(wù)和軟件定時器數(shù)量的增多有所增加。測試時定時器定時值隨機(jī)選取。表1中的時間為不同處理器頻率下,定時器個數(shù)為1和5時觀測到的最大值。其中,T=T1+T2+T3+T4。
表1 時鐘中斷觸發(fā)到定時回調(diào)函數(shù)開始執(zhí)行的時間
由測試數(shù)據(jù)可知,若有定時器到時,則經(jīng)過幾個μs的延時,定時器回調(diào)函數(shù)就可以執(zhí)行。與ms級的定時最小分辨時間相比,其抖動對到時準(zhǔn)確性的影響是非常小的。隨著處理器頻率的提升和處理能力的加強(qiáng),這個抖動時間還可以進(jìn)一步縮小。
第2種抖動情況如圖4所示。
圖4 第2種抖動情況
當(dāng)下一個時鐘節(jié)拍快到來時(如圖4中A時刻),一個定時器被開啟了。因?yàn)橄到y(tǒng)能分辨的最小時間即時鐘節(jié)拍的間隔時間,所以定時器開啟時記錄的當(dāng)前時鐘節(jié)拍數(shù)為1,假設(shè)定時器的定時值就是一個時鐘節(jié)拍間隔。定時器開啟后,第2個時鐘節(jié)拍馬上就到了,由情況1的分析可知,這個定時器的回調(diào)函數(shù)很快就會被執(zhí)行。B時刻表示這個定時器回調(diào)函數(shù)第一次執(zhí)行。C、D時刻為回調(diào)函數(shù)的第2次與第3次執(zhí)行時刻,這兩次到時是比較準(zhǔn)確的。因此,定時器從開啟到回調(diào)函數(shù)開始執(zhí)行的時間與定時值相比是有較大抖動的。若此時的時鐘節(jié)拍間隔為5 ms,則這個抖動的誤差最大即5 ms。這種情況下的抖動只能通過提高每秒的時鐘節(jié)拍數(shù)來減小。因此,在數(shù)據(jù)采集或其他定時器的應(yīng)用中,要留意定時器開啟后第一次到時的處理,以免進(jìn)行錯誤的判斷。
4 定時器管理任務(wù)對操作系統(tǒng)性能的影響
定時器管理任務(wù)的運(yùn)行使應(yīng)用程序可建立的任務(wù)數(shù)減1。該任務(wù)要求是系統(tǒng)中的最高優(yōu)先級,因此每次有時鐘中斷發(fā)生它都要運(yùn)行,必然會消耗掉一定的CPU資源。軟件定時器功能所占用的CPU運(yùn)行時間(設(shè)為M)的計(jì)數(shù)公式為:
M=定時器管理任務(wù)判斷定時器是否到時的時間+定時器回調(diào)函數(shù)執(zhí)行時間+定時器控制塊移除與再插入時間+切換到次低優(yōu)先級任務(wù)的時間
首先,采用μC/OSII中自帶的統(tǒng)計(jì)任務(wù)測試定時器管理任務(wù)對CPU資源的占用情況。測試時系統(tǒng)中開啟3個任務(wù):定時器管理任務(wù)、統(tǒng)計(jì)任務(wù)和 Idle任務(wù)。定時器到時回調(diào)函數(shù)在定時器管理任務(wù)中執(zhí)行,增加了管理任務(wù)運(yùn)行時間。為僅測試系統(tǒng)定時器管理功能的開銷,測試時將定時回調(diào)函數(shù)置為空操作。因統(tǒng)計(jì)任務(wù)要求必須在初始化時建立第一個也是唯一的一個任務(wù)中調(diào)用統(tǒng)計(jì)任務(wù)初始化函數(shù)OSStatInit(),所以需在定時器管理任務(wù)中進(jìn)行必要改動,以保證在統(tǒng)計(jì)任務(wù)初始化后才開啟定時器的管理功能。測試用定時器在main函數(shù)中靜態(tài)創(chuàng)建。
測試后發(fā)現(xiàn),當(dāng)定時器數(shù)由1增加到8時,CPU的使用率一直是1%。這說明系統(tǒng)開啟定時器管理功能后,增加的負(fù)荷很小。另一方面因?yàn)榻y(tǒng)計(jì)任務(wù)計(jì)算CPU使用率時是整數(shù)相除、余數(shù)舍棄,這就使得0~(OSIidleCtrMax/100-1)的計(jì)數(shù)是不能被分辨的,因此統(tǒng)計(jì)任務(wù)不能準(zhǔn)確地反應(yīng)定時器管理任務(wù)對CPU的使用情況。
為了得到更準(zhǔn)確的測量結(jié)果,采用“處理器占用率”這一指標(biāo)對管理任務(wù)開銷進(jìn)行測試。
處理器占用率=軟件定時器功能所占用的CPU運(yùn)行時間(M)/CPU運(yùn)行時間
當(dāng)某一時鐘節(jié)拍到來時,假設(shè)這一時鐘節(jié)拍下無定時器到時,即“到時定時器回調(diào)函數(shù)執(zhí)行時間”和“定時器控制塊移除與再插入時間”為0。若當(dāng)前系統(tǒng)中所創(chuàng)建的定時器正好在同一個分組中,則管理任務(wù)須對每個定時器的到時值進(jìn)行比較,此時為無定時器到時時定時器管理任務(wù)對CPU的最高占用率。測試中,將定時器的到時值設(shè)定為8的倍數(shù)加1,在main()函數(shù)中靜態(tài)創(chuàng)建。使所有定時器控制塊在同一分組中,當(dāng)OSTime也是8的倍數(shù)加1時,就形成了無定時器到時時定時器管理任務(wù)的最壞運(yùn)行情況。
測試環(huán)境為:ARM9 (400 MHz),定時器最小分辨時間為5 ms(該值作為計(jì)算時的“CPU運(yùn)行時間”),硬件計(jì)時器的最小分辨時間為0.02 μs。讀硬件計(jì)時器計(jì)算時間,測試結(jié)果如表2所列。
表2 定時器管理任務(wù)處理器占用率測試結(jié)果
由測試數(shù)據(jù)可知建立定時器數(shù)為8時,處理器占用率遠(yuǎn)小于1%。每增加一個定時器,定時器管理任務(wù)的運(yùn)行時間約增加6.5 μs,處理器的占用率約增加0.01%,任務(wù)的切換時間不變。這是在構(gòu)建的極端情況下測試的,實(shí)際應(yīng)用中的時間要小于這個值。
“定時器控制塊移除與再插入時間”在400 MHz下測試為0.22 μs。某一時鐘節(jié)拍處理時,若有定時器到時,則最壞情況是這個到時的定時器控制塊在鏈表的最后,只有執(zhí)行完整個鏈表的判斷后才開始執(zhí)行該到時定時器的回調(diào)函數(shù)。假設(shè)定時器數(shù)為8,且鏈表中最后一個定時器先到時,則該定時器到時的這個鐘節(jié)拍下處理器利用率為:(0.34 μs+0.22 μs+0.82 μs+定時器回調(diào)函數(shù)執(zhí)行時間)/5 ms=(1.38 μs+定時器回調(diào)函數(shù)執(zhí)行時間)/5 ms。
結(jié)論
本文對μC/OSII軟件定時器的算法及抖動問題進(jìn)行了分析,并在特定平臺上進(jìn)行了測試,較好地反映出了該定時器的精度和對處理器資源的占用情況。測試結(jié)果可信度高,為在μC/OSII下的軟件定時器應(yīng)用開發(fā)提供了可靠的依據(jù)。
責(zé)任編輯:gt
-
操作系統(tǒng)
+關(guān)注
關(guān)注
37文章
6741瀏覽量
123192 -
定時器測試
+關(guān)注
關(guān)注
0文章
1瀏覽量
461
發(fā)布評論請先 登錄
相關(guān)推薦
基于STM32的軟件定時器設(shè)計(jì)

什么是軟件定時器?基于STM32的軟件定時器該怎樣去實(shí)現(xiàn)呢
ESP8266的管腳的控制和軟件定時器的使用
設(shè)計(jì)軟件定時器

STM32開發(fā)項(xiàng)目:軟件虛擬定時器的實(shí)現(xiàn)
軟件定時器簡介及程序配置
單片機(jī)軟件定時器的實(shí)現(xiàn)方法
freeRTOS軟件定時器的使用
Free RTOS的軟件定時器
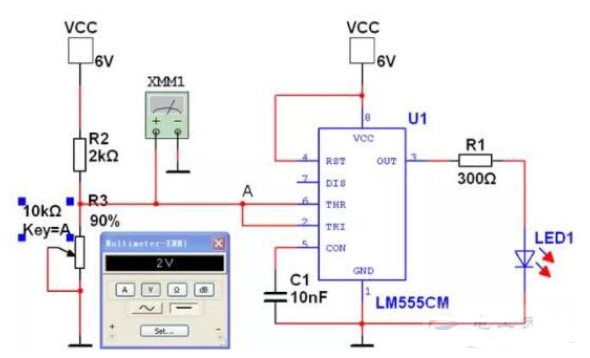
555定時器的仿真測試





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論