 三相電動機的制動操控線路
三相電動機的制動操控線路
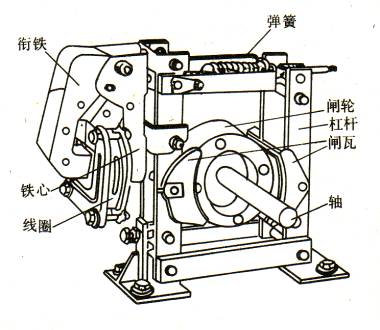
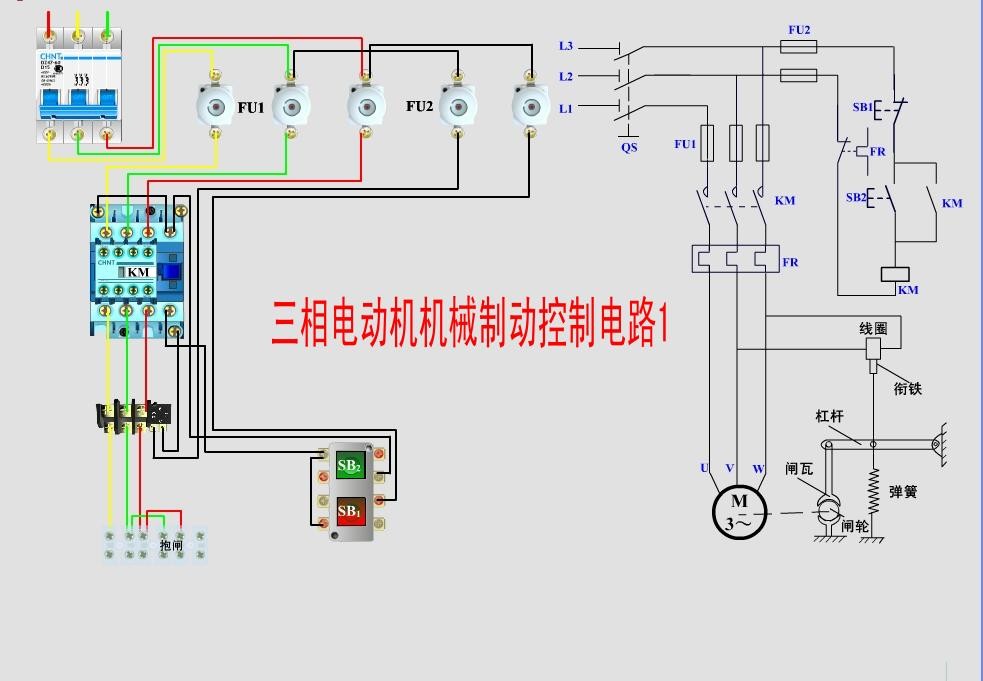
三相電動機從堵截電源到徹底接連旋轉,因為慣性的聯絡,總要經過一段時刻,為了縮短輔佐時刻,跋涉出產功率,使停機方位精確并,為了安全出產,懇求電動機能活絡泊車。通常選用機械制動和電氣制動,機械制動選用機械抱閘或液壓設備制動,電氣制動時電動機在泊車時發作一個與原旋轉方向相反的制動力矩。機床中常用的電氣制動時反接制動和能耗制動。
一、反接制動
反接制動是運用改動異步電動機定子繞組中的三相電源相序,發作與轉子慣性旋轉方向相反的轉矩,因而發作制動效果。反接制動的進程為:泊車時,首要將三相電源切換,然后當電動機轉速較低時再將三相電源堵截。
圖1所示為單向反接制動線路,其作業進程是:合上Q,按SB2,KM1得電自鎖,電動機M正轉,當轉速抵達速度繼電器KS的整定值時,KV的常開觸點閉合,為反接制動作好預備。M泊車時,按下SB1,SB1的常閉觸點先翻開,KM1失電,堵截M的正序電源,但M因慣性仍以很高的轉速持續旋轉,原已閉合的KS常開觸點仍閉合,SB1的常開觸點后閉合,因為此刻KM1的常閉輔佐觸點已復位,因而KM2得電自鎖,M定子串接兩相電阻進行反接制動。當M的轉速降低到低于KS的整定值時,KS的常開觸點復位,KM2失電,M堵截反序電源天然泊車至零。
因為反接制動時,轉子與定子旋轉磁場間的速度挨近于兩倍的同步轉速,因而定子繞組中流過的反接制動電流恰當于全電壓直接主張時的兩倍,故較大功率的電動機進行反接制動時,需在電動機兩相或三相定子然組中串接必定的電阻以綁縛制動電流。
反接制動時,旋轉磁場的相對速度很大,定子電流也很大,因而制動效果顯著。但在制動進程中有沖擊,對傳動部件有害,能量消耗也較大。故用于不太常常主張、制動的設備,如銑床、鏜床、中型車床主軸。
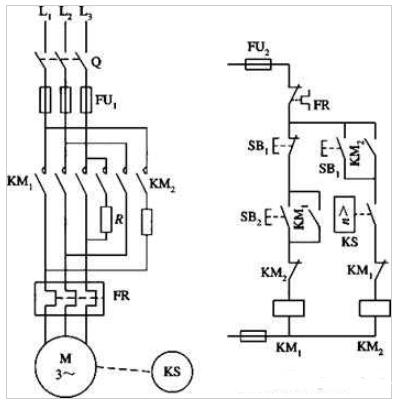
圖1單向反接制動線路
二、能耗制動
能耗制動是在電動機要泊車時堵截三相溝通電源的一同,把定子繞組接入電源,運用轉子感應電流與接連磁場的效果以抵達制動的意圖,在轉速挨近于零時再堵截直流電源。能耗制動實質上是把轉子正本貯存的機械能改動為電能,消耗在轉子的制動上,所以稱為能耗制動。通常可用時刻繼電器按時刻操控準則或用速度繼電器按速度操控準則來進行制動,對制動精確性懇求不高的機床也能夠手動操控。
圖2所示是用時刻繼電器按時刻操控準則方案的單向能耗制動操控線路,圖中KM1為單向作業觸摸器,KM2為能耗制動觸摸器,KT為時刻繼電器,T為整流變壓器,VC為橋式整流電路。其作業進程如下:
合上Q,按下SB2,KM1得電自保,電動機M主張;泊車時,按下SB1,其常閉觸頭先斷開,KM1失電,M定子堵截三相電源;SB1的常開觸頭后閉合,KM2、KT一同得電自保,假定M定子繞組Y形聯接,則將兩相定子繞組接入直流電源進行能耗制動。M在能耗制動效果下轉速活絡降低,當轉速挨近零時,抵達KT的整守時刻,其延常常閉觸頭翻開,KM2、KT相繼斷電,制動完畢。
該電路中,將KT常開瞬動觸點與KM2自保觸點串聯,是思考KT斷線或機械卡住致使常閉延時觸點不能斷開,不至于使KM2長時刻得電,構成M定子繞組長時刻經過直流電流而過熱。
圖3所示是用速度繼電器按速度操控準則方案的雙向能耗制動操控線路,圖中KM1、KM2為正回轉觸摸器,KM3為制動觸摸器,KV1、KV2為速度繼電器。其作業進程如下:
電動機M正向主張作業泊車時能耗制動進程:合上Q,按下SB2,KM1得電自保,M正向主張作業,當正向轉速抵達KV1整定值時,KV1常開觸點閉合;泊車時,按下SB1,其常閉觸點先翻開,KM1失電,因為慣性M的轉速還很高,KV1的常開觸點仍閉合,在SB1的常開觸點閉合時,KM3得電自鎖,(版權悉數)M定子繞組接通直流電源進行能耗制動,M的轉速活絡降低,當正向轉速低于KV1整定值時,KV1的常開觸點復位,KM3失電,能耗制動完畢,往后M天然泊車。
M反向主張作業泊車時能耗制動進程與正向相似,不再贅述。
與反接制動比照照,能耗制動具有制動精確、平穩,能量消耗小等長處。但制動力較弱,分外是在低速時尤為超卓。別的,它還需求直流電源。故適用于懇求制動精確、平穩的場合,如磨床、龍門刨床及組合機床的主軸定位等。
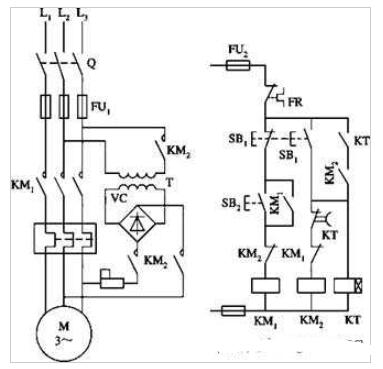
圖2時刻繼電器操控的操控線路
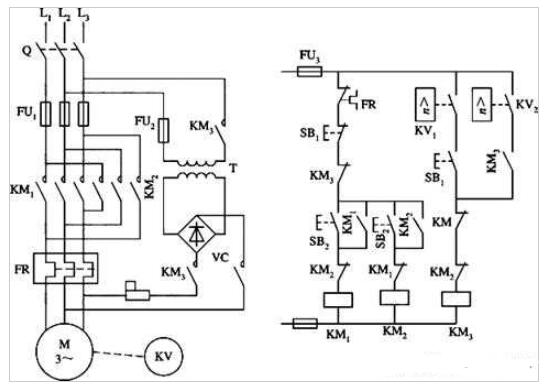
圖3速度繼電器操控的操控線路
-
三相電動機
+關注
關注
2文章
65瀏覽量
12395 -
制動
+關注
關注
1文章
38瀏覽量
12271
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論