 分析如何遠離漫天飛舞的全局變量
分析如何遠離漫天飛舞的全局變量
來源:嵌入式大雜燴
前篇 《由static來談談模塊封裝》 基本實現了對外隱藏屬性,隱藏局部模塊函數,開放接口的功能。對于這個話題還有些點沒有深入探討:為什么要這樣做?以及這樣做的好處。或許很多剛剛開始用C或者其他面向對象編程語言(比如C++)的小伙伴們,常常在一個項目里為了圖省事,整了很多全局對象、全局變量滿天飛,這樣做其實是有很多弊端,本文來聊聊這個話題。
先談談全局變量的特點全局變量(Global Variables):在計算機編程語言中,所謂全局變量是指具有全局作用域的變量,這意味著它在整個程序中是可見的,因此是可訪問的。所謂可訪問,是指全局可讀、全局可寫。在編譯語言中,全局變量通常是靜態變量,其范圍(生命周期)是程序的整個運行時。當然解釋性語言除外,解釋性語言包括命令行解釋器(比如python, Java script,shell等)中,全局變量通常在聲明時由解釋器動態分配,這是由于解釋性語言是讀取》解釋》執行模式,不像編譯性語言,運行前可預知變量屬性,解釋性語言讀取解釋前無從獲取變量屬性。
在C/C++編程語言中,全局變量的這種全局可見性特點,濫用全局變量會讓代碼表現當相當邪惡!如果使用全局變量,就意味著下面這些場景的存在:
實際代碼可能有很多地方在讀、在寫全局變量
全局變量在多線程或多任務間共享
全局變量在常規代碼和中斷服務程序間共享
為啥說全局變量很邪惡?單片機裸機編程或許你會說,我就這樣用?咋了?軟件也跑的很好啊?來看看這個場景:
一個超字寬的變量(比如16位單片機,字寬即為16位),正被一個常規代碼在寫變量數據域時且還沒寫完,啪嘰,來了個中斷!中斷一來,CPU趕緊把手里的活兒停下來,奔過去處理中斷了,不巧在中斷函數里,該變量因業務需求有需要寫這個變量有經驗的不這么寫,僅為了方便說明:
舉個栗子,還是以之前文章的傳感器為例,實際應用中傳感器可能是下面這樣的數據結構來描述:
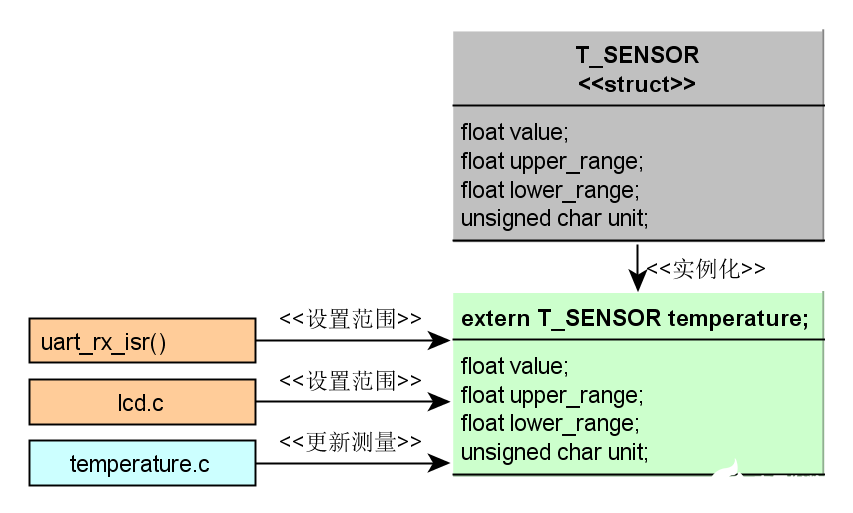
#ifndef _SENSOR_H_#define _SENSOR_H_typedef struct _t_sensor{ /* 測量值與測量范圍及單位有關 */ float value; /* 測量范圍,根據采樣值映射 */ float upper_range; float lower_range; /* 溫度單位 */ unsiged char unit;}T_SENSOR;/*假定是一個溫度測量產品*/extern T_SENSOR temperature;#endif _SENSOR_H_
假定這個傳感器數據結構有這樣一些被訪問的可能:
上位機會改寫測量數據的范圍及單位,串口通信中斷服務程序直接寫這個全局變量中的上下限數據域
LCD操作界面可改寫溫度上下限范圍。
測量更新模塊根據當前范圍及單位配置,將傳感器采集到的數據映射為測量值。
這些需求用例,用圖描述一下:
比如用戶操作HMI界面正改寫溫度范圍,而此時遠程上位機也正改寫溫度范圍,按上面這個做法,可能出現哪些邪惡的后果呢?
通過LCD界面寫入上限為300.5(假定原下限為0),此時遠程串口報文收到,程序直接在中斷服務程序將范圍修改為(-100,200.5),此時中斷返回,用戶可能接著修改下限為-200,則最終設備內的溫度范圍可能既不是(-100,200.5)也不是(-200,300.5),而可能是(-200,200.5)。這是一個易理解的數據混亂的場景。
現實中如果使用的單片機是8位/16位單片機,一條指令無法完成操作一個32位立即數,有可能才完成一個浮點數中某幾個字節,此時就被中斷打斷寫入200,然后中斷返回后繼續寫入剩下字節,數據可能會變得非常詭異!利用http://www.speedfly.cn/tools/hexconvert/ 在線工具轉換浮點數到16進制:
0x43964000 /* 浮點數300.5的16進制*/0x43488000 /* 浮點數200.5的16進制*/
假定中斷進入時,HMI界面程序寫入了0x4396前兩個字節,中斷返回時,上限改寫為200.5(0x43488000),此時繼續執行后面兩個字節寫入,則上限變成為(0x43484000),來看看這個數是多大?變成了200.25,這是不是很邪惡?

或許有的朋友會說,可以在LCD寫范圍時關中斷嘛。誠然,可以這么做:
void hmi_operate(){ /*關中斷*/ _disable_interrupt(); /*改寫溫度范圍*/ 。。.。 /*開中斷*/ _enable_interrupt();}
但是如果這個全局變量有很多地方在改寫,為了數據安全,勢必就到處開/關中斷,這樣做的壞處:
經常開關中斷,勢必影響中斷響應,會有概率丟失異步中斷處理(比如串口按字節接收中斷,可能就會漏收字節),程序不健壯,工作不穩定。
到處訪問改寫,不易調試,群魔亂舞,代碼也不易維護。想加點東西,改點東西可能隨處都是坑,一不小心就掉坑里去了!
初學者甚至不會用struct將相關的數據包在一起,其結果是代碼里到處都是基本類型的全局變量。一些簡單的業務邏輯實現變成一個復雜的代碼,數據信息流向一團亂麻。
裸機程序策略對于上面這樣一個應用場景,怎么解決這種混亂的現象呢。這里分享一下我的思路,這里將主要的串口以及測量模塊的設計思路用UML圖描述一下大體思路:
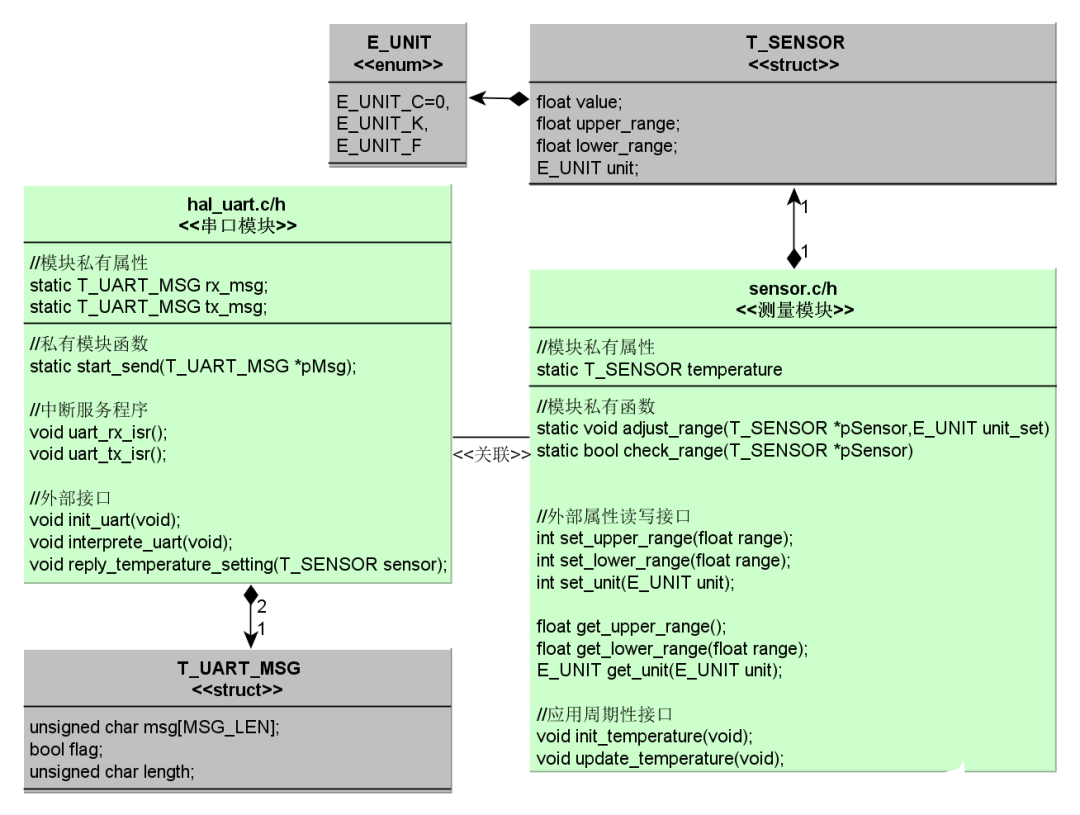
如此一來,外部就看不到全局變量了,只需要調用對應的set/get方法即可實現讀寫訪問,由于是裸機前后臺程序,數據流向就變的非常清晰了。main函數的主循環大致就可能是這樣:
void main(void){ /*模塊初始化*/ init_uart(); init_temperature(); 。。.。 while(1) { interprete_uart(); /*可能是周期性調用*/ if(timer_100ms) { timer_100ms = 0; update_temperature(); } 。。.。 } }
那么uart協議解析要怎么做呢?
void interprete_uart(void){ if(rx_msg.flag) { rx_msg.flag = false; /*報文完整性檢查*/ 。。. /*設置溫度配置*/ set_upper_range(xxx); set_lower_range(xxx); set_unit(xxx); } if(tx_msg.flag) { tx_msg.flag = false; start_send(); }}static start_send(T_UART_MSG *pMsg){ /*負責底層操作,啟動中斷傳輸*/}/*提供應答數據接口*/void reply_temperature_setting(T_SENSOR sensor){ /*解析傳入參數并封裝應答報文*/}
如此一來,數據流向將變得很清晰,串口接收到數據更新范圍配置時,也無需開關中斷了,從應用角度幾乎見不到全局變量。當然這樣做的代價就是會增加一些棧開銷。但是這種代價還是值得的。
對于測量模塊的set函數思路稍做說明:
int set_upper_range(float range){ T_SENSOR temp = temperature; temp.upper_range = range; /*實現范圍合理性檢查*/ if(check_range(temp)) { /*兩個結構體變量可以直接賦值*/ temperature = temp; return 0; } else { return -1; }}int set_unit(E_UNIT unit){ if(unit》E_UNIT_F) return -1; adjust_range(&temperature,unit); temperature.unit = unit; }
上述代碼旨在分享個人的一些思路,其中或有不夠嚴謹的地方,但通過這樣的設計思路,應能大幅度遠離滿天飛的全局變量。
多任務/多線程環境上面描述其實本質上描述了裸機程序里,普通模式運行程序與中斷服務程序對于臨界資源的競爭。事實上現在不管是單片機,還是處理器,大多都是基于一個操作系統進行應用開發。甚至還可能是多核芯片,這里就存在并發競爭訪問資源的問題。
臨界資源:各任務/線程采取互斥的方式,實現共享的資源稱作臨界資源。屬于臨界資源的硬件串口打印、顯示等,軟件有消息緩沖隊列、變量、數組、緩沖區等。多任務/線程間應采取互斥方式,從而實現對這種資源的共享。
多任務/多線程情況下在寫模塊時,只需要封裝進保護機制即可。常見的保護機制有關中斷、信號量、互斥鎖等。在Linux內核中為應對多核并發訪問還有自旋鎖機制。由于篇幅所限,本文就不做展開了,先挖個坑,以后有機會再分享吧。
總結一下在前文介紹static文章的基礎上,相對更深入的介紹了為何需要隱藏屬性以及開放接口的做法。以及如何遠離邪惡的全局變量漫天飛舞的不良設計風格。
-
C++
+關注
關注
22文章
2104瀏覽量
73504 -
全局變量
+關注
關注
1文章
28瀏覽量
8961
發布評論請先 登錄
相關推薦
LABVIEW調用DLL,DLL中包含全局變量不識別的問題
建立更多的全局變量的時候,如何使得PROGRAM SIZE不增大呢?
COSMIC在外部中斷中修改全局變量后,發現在主程序中,修改的值又變回來了,為什么?
使用IAR定義全局變量出現兩個同名不同地址變量是什么原因導致的?
請問ucos中全局變量OSTime最終能累加到多少呢?
請問stm32程序中如何優化大量的編譯開關和全局變量?
你是不是也沒躲過這個坑?用了太多全局變量......






 工商網監
工商網監
評論