") IC設(shè)計(jì)中同步復(fù)位與異步復(fù)位的區(qū)別
IC設(shè)計(jì)中同步復(fù)位與異步復(fù)位的區(qū)別
1、什么是同步邏輯和異步邏輯,同步電路和異步電路的區(qū)別是什么?
同步邏輯是時(shí)鐘之間有固定的因果關(guān)系。異步邏輯是各時(shí)鐘之間沒(méi)有固定的因果關(guān)系。
電路設(shè)計(jì)可分類為同步電路和異步電路設(shè)計(jì)。同步電路利用時(shí)鐘脈沖使其子系統(tǒng)同步運(yùn)作,而異步電路不使用時(shí)鐘脈沖做同步,其子系統(tǒng)是使用特殊的“開始”和 “完成”信號(hào)使之同步。由于異步電路具有下列優(yōu)點(diǎn)--無(wú)時(shí)鐘歪斜問(wèn)題、低電源消耗、平均效能而非最差效能、模塊性、可組合和可復(fù)用性--因此近年來(lái)對(duì)異步 電路研究增加快速,論文發(fā)表數(shù)以倍增,而Intel Pentium 4處理器設(shè)計(jì),也開始采用異步電路設(shè)計(jì)。
異步電路主要是組合邏輯電路,用于產(chǎn)生地址譯碼器、FIFO或RAM的讀寫控制信號(hào)脈沖,其邏輯輸出與任何時(shí)鐘信號(hào)都沒(méi)有關(guān)系,譯碼輸出產(chǎn)生的毛刺通常是 可以監(jiān)控的。同步電路是由時(shí)序電路(寄存器和各種觸發(fā)器)和組合邏輯電路構(gòu)成的電路,其所有操作都是在嚴(yán)格的時(shí)鐘控制下完成的。這些時(shí)序電路共享同一個(gè)時(shí) 鐘CLK,而所有的狀態(tài)變化都是在時(shí)鐘的上升沿(或下降沿)完成的。
2、什么是"線與"邏輯,要實(shí)現(xiàn)它,在硬件特性上有什么具體要求?
線與邏輯是兩個(gè)輸出信號(hào)相連可以實(shí)現(xiàn)與的功能。在硬件上,要用oc門來(lái)實(shí)現(xiàn)(漏極或者集電極開路),由于不用oc門可能使灌電流過(guò)大,而燒壞邏輯門,同時(shí)在輸出端口應(yīng)加一個(gè)上拉電阻。(線或則是下拉電阻)
3、什么是Setup 和Holdup時(shí)間,setup和holdup時(shí)間區(qū)別.
Setup/hold time 是測(cè)試芯片對(duì)輸入信號(hào)和時(shí)鐘信號(hào)之間的時(shí)間要求。建立時(shí)間是指觸發(fā)器的時(shí)鐘信號(hào)上升沿到來(lái)以前,數(shù)據(jù)穩(wěn)定不變的時(shí)間。輸入信號(hào)應(yīng)提前時(shí)鐘上升沿(如上升沿 有效)T時(shí)間到達(dá)芯片,這個(gè)T就是建立時(shí)間-Setup time.如不滿足setup time,這個(gè)數(shù)據(jù)就不能被這一時(shí)鐘打入觸發(fā)器,只有在下一個(gè)時(shí)鐘上升沿,數(shù)據(jù)才能被打入觸發(fā)器。保持時(shí)間是指觸發(fā)器的時(shí)鐘信號(hào)上升沿到來(lái)以后,數(shù)據(jù)穩(wěn)定 不變的時(shí)間。如果hold time不夠,數(shù)據(jù)同樣不能被打入觸發(fā)器。
建立時(shí)間(Setup Time)和保持時(shí)間(Hold time)。建立時(shí)間是指在時(shí)鐘邊沿前,數(shù)據(jù)信號(hào)需要保持不變的時(shí)間。保持時(shí)間是指時(shí)鐘跳變邊沿后數(shù)據(jù)信號(hào)需要保持不變的時(shí)間。如果不滿足建立和保持時(shí)間 的話,那么DFF將不能正確地采樣到數(shù)據(jù),將會(huì)出現(xiàn)stability的情況。如果數(shù)據(jù)信號(hào)在時(shí)鐘沿觸發(fā)前后持續(xù)的時(shí)間均超過(guò)建立和保持時(shí)間,那么超過(guò)量 就分別被稱為建立時(shí)間裕量和保持時(shí)間裕量。
4、什么是競(jìng)爭(zhēng)與冒險(xiǎn)現(xiàn)象?怎樣判斷?如何消除?
在組合邏輯中,由于門的輸入信號(hào)通路中經(jīng)過(guò)了不同的延時(shí),導(dǎo)致到達(dá)該門的時(shí)間不一致叫競(jìng)爭(zhēng)。產(chǎn)生毛刺叫冒險(xiǎn)。如果布爾式中有相反的信號(hào)則可能產(chǎn)生競(jìng)爭(zhēng)和冒險(xiǎn)現(xiàn)象。解決方法:一是添加布爾式的消去項(xiàng),二是在芯片外部加電容。
5、你知道那些常用邏輯電平?TTL與COMS電平可以直接互連嗎?
常用邏輯電平:12V,5V,3.3V;TTL和CMOS不可以直接互連,由于TTL是在0.3-3.6V之間,而CMOS則是有在12V的有在5V的。 CMOS輸出接到TTL是可以直接互連。TTL接到CMOS需要在輸出端口加一上拉電阻接到5V或者12V。cmos的高低電平分別 為:Vih>=0.7VDD,Vil<=0.3VDD;Voh>=0.9VDD,Vol<=0.1VDD. TTL的為:Vih>=2.0v,Vil<=0.8v;Voh>=2.4v,Vol<=0.4v. 用cmos可直接驅(qū)動(dòng)ttl;加上拉后,ttl可驅(qū)動(dòng)cmos.
6、如何解決亞穩(wěn)態(tài)。
亞穩(wěn)態(tài)是指觸發(fā)器無(wú)法在某個(gè)規(guī)定時(shí)間段內(nèi)達(dá)到一個(gè)可確認(rèn)的狀態(tài)。當(dāng)一個(gè)觸發(fā)器進(jìn)入亞穩(wěn)態(tài)時(shí),既無(wú)法預(yù)測(cè)該單元的輸出電平,也無(wú)法預(yù)測(cè)何 時(shí)輸出才能穩(wěn)定在某個(gè)正確的電平上。在這個(gè)穩(wěn)定期間,觸發(fā)器輸出一些中間級(jí)電平,或者可能處于振蕩狀態(tài),并且這種無(wú)用的輸出電平可以沿信號(hào)通道上的各個(gè)觸 發(fā)器級(jí)聯(lián)式傳播下去。
解決方法:
1 降低系統(tǒng)時(shí)鐘
2 用反應(yīng)更快的FF
3 引入同步機(jī)制,防止亞穩(wěn)態(tài)傳播
4 改善時(shí)鐘質(zhì)量,用邊沿變化快速的時(shí)鐘信號(hào)
關(guān)鍵是器件使用比較好的工藝和時(shí)鐘周期的裕量要大。
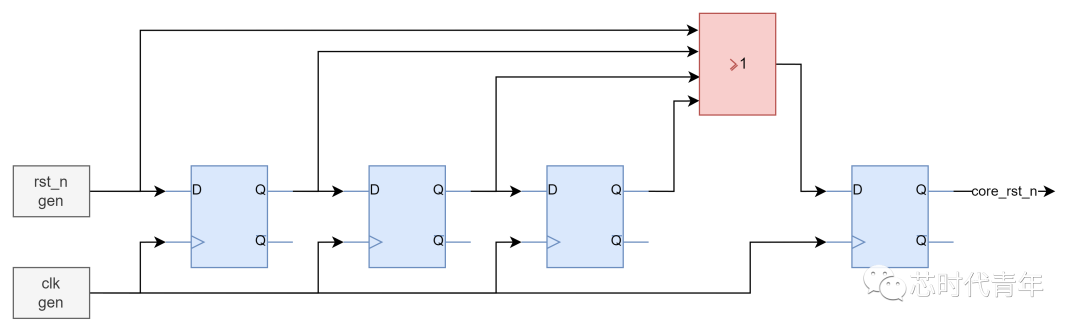
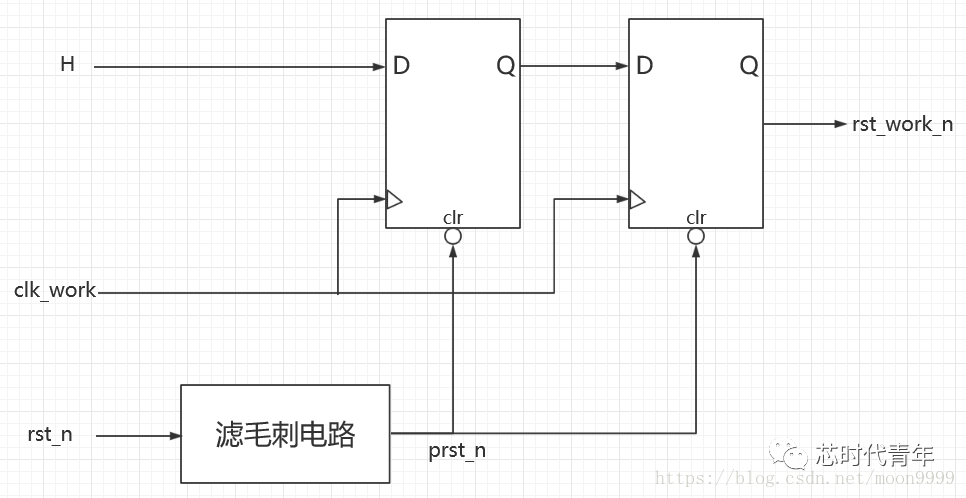
7、IC設(shè)計(jì)中同步復(fù)位與異步復(fù)位的區(qū)別。
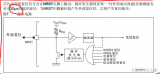
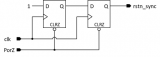
同步復(fù)位在時(shí)鐘沿采復(fù)位信號(hào),完成復(fù)位動(dòng)作。異步復(fù)位不管時(shí)鐘,只要復(fù)位信號(hào)滿足條件,就完成復(fù)位動(dòng)作。異步復(fù)位對(duì)復(fù)位信號(hào)要求比較高,不能有毛刺,如果其與時(shí)鐘關(guān)系不確定,也可能出現(xiàn)亞穩(wěn)態(tài)。
8、MOORE 與 MEELEY狀態(tài)機(jī)的特征。
Moore 狀態(tài)機(jī)的輸出僅與當(dāng)前狀態(tài)值有關(guān), 且只在時(shí)鐘邊沿到來(lái)時(shí)才會(huì)有狀態(tài)變化. Mealy 狀態(tài)機(jī)的輸出不僅與當(dāng)前狀態(tài)值有關(guān), 而且與當(dāng)前輸入值有關(guān).
9、多時(shí)域設(shè)計(jì)中,如何處理信號(hào)跨時(shí)域。
不同的時(shí)鐘域之間信號(hào)通信時(shí)需要進(jìn)行同步處理,這樣可以防止新時(shí)鐘域中第一級(jí)觸發(fā)器的亞穩(wěn)態(tài)信號(hào)對(duì)下級(jí)邏輯造成影響,其中對(duì)于單個(gè)控制信號(hào)可以用兩級(jí)同步器,如電平、邊沿檢測(cè)和脈沖,對(duì)多位信號(hào)可以用FIFO,雙口RAM,握手信號(hào)等。
跨時(shí)域的信號(hào)要經(jīng)過(guò)同步器同步,防止亞穩(wěn)態(tài)傳播。例如:時(shí)鐘域1中的一個(gè)信號(hào),要送到時(shí)鐘域2,那么在這個(gè)信號(hào)送到時(shí)鐘域2之前,要先經(jīng)過(guò)時(shí)鐘域2的同步 器同步后,才能進(jìn)入時(shí)鐘域2。這個(gè)同步器就是兩級(jí)d觸發(fā)器,其時(shí)鐘為時(shí)鐘域2的時(shí)鐘。這樣做是怕時(shí)鐘域1中的這個(gè)信號(hào),可能不滿足時(shí)鐘域2中觸發(fā)器的建立 保持時(shí)間,而產(chǎn)生亞穩(wěn)態(tài),因?yàn)樗鼈冎g沒(méi)有必然關(guān)系,是異步的。這樣做只能防止亞穩(wěn)態(tài)傳播,但不能保證采進(jìn)來(lái)的數(shù)據(jù)的正確性。所以通常只同步很少位數(shù)的信 號(hào)。比如控制信號(hào),或地址。當(dāng)同步的是地址時(shí),一般該地址應(yīng)采用格雷碼,因?yàn)楦窭状a每次只變一位,相當(dāng)于每次只有一個(gè)同步器在起作用,這樣可以降低出錯(cuò)概 率,象異步FIFO的設(shè)計(jì)中,比較讀寫地址的大小時(shí),就是用這種方法。 如果兩個(gè)時(shí)鐘域之間傳送大量的數(shù)據(jù),可以用異步FIFO來(lái)解決問(wèn)題。
10、給了reg的setup,hold時(shí)間,求中間組合邏輯的delay范圍。
Delay < period - setup – hold
11、時(shí)鐘周期為T,觸發(fā)器D1的寄存器到輸出時(shí)間最大為T1max,最小為T1min。組合邏輯電路最大延遲為T2max,最小為T2min。問(wèn),觸發(fā)器D2的建立時(shí)間T3和保持時(shí)間應(yīng)滿足什么條件。
T3setup>T+T2max,T3hold>T1min+T2min
12、給出某個(gè)一般時(shí)序電路的圖,有Tsetup,Tdelay,Tck->q,還有 clock的delay,寫出決定最大時(shí)鐘的因素,同時(shí)給出表達(dá)式。
T+Tclkdealy>Tsetup+Tco+Tdelay;
Thold>Tclkdelay+Tco+Tdelay;
13、說(shuō)說(shuō)靜態(tài)、動(dòng)態(tài)時(shí)序模擬的優(yōu)缺點(diǎn)。
靜態(tài)時(shí)序分析是采用窮盡分析方法來(lái)提取出整個(gè)電路存在的所有時(shí)序路徑,計(jì)算信號(hào)在這些路徑上的傳播延時(shí),檢查信號(hào)的建立和保持時(shí)間是否滿足時(shí)序要求,通過(guò) 對(duì)最大路徑延時(shí)和最小路徑延時(shí)的分析,找出違背時(shí)序約束的錯(cuò)誤。它不需要輸入向量就能窮盡所有的路徑,且運(yùn)行速度很快、占用內(nèi)存較少,不僅可以對(duì)芯片設(shè)計(jì) 進(jìn)行全面的時(shí)序功能檢查,而且還可利用時(shí)序分析的結(jié)果來(lái)優(yōu)化設(shè)計(jì),因此靜態(tài)時(shí)序分析已經(jīng)越來(lái)越多地被用到數(shù)字集成電路設(shè)計(jì)的驗(yàn)證中。
動(dòng)態(tài)時(shí)序模擬就是通常的仿真,因?yàn)椴豢赡墚a(chǎn)生完備的測(cè)試向量,覆蓋門級(jí)網(wǎng)表中的每一條路徑。因此在動(dòng)態(tài)時(shí)序分析中,無(wú)法暴露一些路徑上可能存在的時(shí)序問(wèn)題;
14、一個(gè)四級(jí)的Mux,其中第二級(jí)信號(hào)為關(guān)鍵信號(hào) 如何改善timing。
關(guān)鍵:將第二級(jí)信號(hào)放到最后輸出一級(jí)輸出,同時(shí)注意修改片選信號(hào),保證其優(yōu)先級(jí)未被修改。
15、為什么一個(gè)標(biāo)準(zhǔn)的倒相器中P管的寬長(zhǎng)比要比N管的寬長(zhǎng)比大?
和載流子有關(guān),P管是空穴導(dǎo)電,N管電子導(dǎo)電,電子的遷移率大于空穴,同樣的電場(chǎng)下,N管的電流大于P管,因此要增大P管的寬長(zhǎng)比,使之對(duì)稱,這樣才能使得兩者上升時(shí)間下降時(shí)間相等、高低電平的噪聲容限一樣、充電放電的時(shí)間相等
16、latch與register的區(qū)別,為什么現(xiàn)在多用register.行為級(jí)描述中l(wèi)atch如何產(chǎn)生的。
latch是電平觸發(fā),register是邊沿觸發(fā),register在同一時(shí)鐘邊沿觸發(fā)下動(dòng)作,符合同步電路的設(shè)計(jì)思想,而latch則屬于異步電路設(shè)計(jì),往往會(huì)導(dǎo)致時(shí)序分析困難,不適當(dāng)?shù)膽?yīng)用latch則會(huì)大量浪費(fèi)芯片資源。
17、BLOCKING NONBLOCKING 賦值的區(qū)別。
非阻塞賦值:塊內(nèi)的賦值語(yǔ)句同時(shí)賦值,一般用在時(shí)序電路描述中
編輯:hfy
-
IC設(shè)計(jì)
+關(guān)注
關(guān)注
37文章
1291瀏覽量
103762 -
邏輯電平
+關(guān)注
關(guān)注
0文章
151瀏覽量
14398 -
同步電路
+關(guān)注
關(guān)注
1文章
60瀏覽量
13298 -
異步電路
+關(guān)注
關(guān)注
2文章
48瀏覽量
11088
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
FPGA復(fù)位的8種技巧

復(fù)位電路的設(shè)計(jì)問(wèn)題

STM32復(fù)位電路用復(fù)位芯片和阻容復(fù)位電路區(qū)別
FPGA同步復(fù)位和異步復(fù)位
電容在復(fù)位電路中的作用(復(fù)位電路具體要怎么設(shè)計(jì))
什么是復(fù)位同步電路 reset synchronizer?
如何排查GD32 MCU復(fù)位是由哪個(gè)復(fù)位源導(dǎo)致的?
GD32 MCU電源復(fù)位和系統(tǒng)復(fù)位有什么區(qū)別
異步復(fù)位異步釋放會(huì)有什么問(wèn)題?FPGA異步復(fù)位為什么要同步釋放呢?

為什么需要復(fù)位電路?漫談復(fù)位reset

同步復(fù)位和異步復(fù)位到底孰優(yōu)孰劣呢?
復(fù)位電路的復(fù)位條件和復(fù)位過(guò)程
對(duì)于芯片中的復(fù)位信號(hào)我們通常會(huì)有哪些特殊處理?
異步電機(jī)與同步電機(jī)的區(qū)別和應(yīng)用
異步復(fù)位同步撤離是什么意思?如何做到異步復(fù)位同步撤離呢?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論