 村田超聲波傳感器的基本知識、最新進展、以及在ADAS中的的應用
村田超聲波傳感器的基本知識、最新進展、以及在ADAS中的的應用
新一代汽車是未來市場的一大支柱,消費者關注的不僅僅是高性能的電動汽車和混合動力車,近年來,智慧出行概念以及新一代智能網聯汽車也備受關注。
所謂智能網聯汽車,是指通過搭載先進裝置收集車體狀態和路面狀態的各種信息,融合通訊技術來提高駕駛安全性的汽車類型。
也就是說,未來的汽車要能夠眼觀六路、耳聽八方。
推動智能網聯、駕駛全自動化的核心技術被簡稱為V2X:
車輛間通訊(V2V:Vehicle to Vehicle)
車輛與基礎設施通過網絡實現互相通信(V2I: Vehicle to Infrastructure)
V2X技術構建高效的交通系統,能快速獲得即時路況,更能有效地防止交通事故等,實現最高階的完全自動化駕駛(ADAS)。
視頻1. ADAS發展的五個階段 上面這段視頻介紹自動駕駛的不同發展階段,無論是“Level 0”全人工駕駛泊車,還是高階的完全自動化駕駛“Level 5”(未來無人“車隊”智慧出行商業模式),總是出現超聲波傳感器的身影。 其實,超聲波傳感器輔助駕駛員泊車(PAS)的歷史比車載攝像機還早一些。而現在,已實用的輔助駕駛全自動泊車,就是充分發揮超聲波傳感器和攝像機組合。 小QUIZ: 你知道停車輔助系統(PAS)中必不可少的超聲波傳感器使用了村田的哪兩個技術嗎?
停車輔助系統(PAS)
必不可少的超聲波傳感器
使用了村田的
傳感技術和
壓電陶瓷處理技術
下面就為你介紹村田超聲波傳感器的基本知識、最新進展、以及在ADAS中的越來越重要的應用。
1
什么是超聲波傳感器?
超聲波通常是指頻率超過人類聽覺系統的低頻可聽范圍(0 Hz至20 kHz)的聲波。
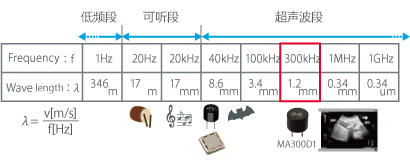
其中:
v:音速346m/s (@25℃)
f:頻率
λ:波長
超聲波的發聲原理是利用壓電陶瓷具有根據電壓方向膨脹和收縮的特征,將電信號轉換為陶瓷振動,通過陶瓷的反復膨脹和收縮讓空氣振動,并發出超聲波。
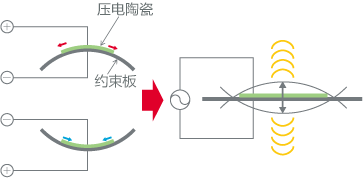
實際使用中,超聲波傳感器將電信號施加到超聲波換能器(發射器),通過膨脹和收縮壓電陶瓷,發射超聲波;然后,再由接收器接收超聲波并轉換為用于分析的電信號并加以各種應用。

2
超聲波的特性
為什么利用分析超聲波信號就能檢測物體的距離、檢測物體是否存在、以及檢測物體移動? 這是由聲波的特性所決定的。因為聲波的傳播速度因介質而異,并且,聲波還具有通過介質的聲阻抗來反射和透射的特性。比如,
音速會隨著彈性模量的增加而增加。音速=彈性模量/密度,液體和固體中的音速比氣體更快;
空氣中的音速受溫度的影響。空氣中的音速C=331.5+0.6T [m/s],其中,C是空氣中的音速,T是氣溫(℃);
由于聲阻抗Zo=ρ?C(其中ρ是介質密度、C是介質中的音速),所以,當介質的聲阻抗差較大時,反射增加,當聲阻抗差較小時,發生透射。
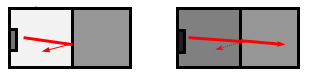
聲波在不同介質界面發生反射與透射
不同物體由于組成材料不同,都具有其各自固有的、不同的聲阻抗和音速。也就是說,介質中的音速、聲阻抗是表示聲音傳播容易程度的數值。反之,通過發射和收集這些參數,就能用來判斷聲波說碰到的“障礙物”界面的空間情況。
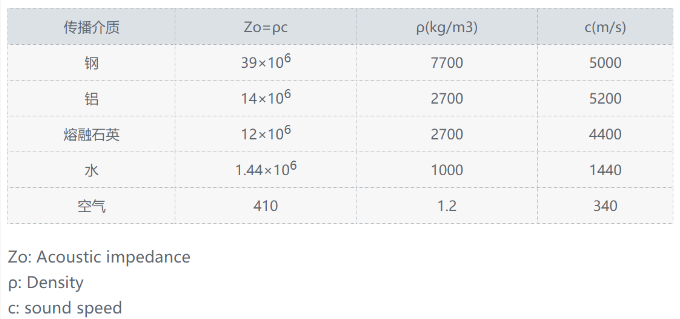
各種介質中的音速和聲阻抗
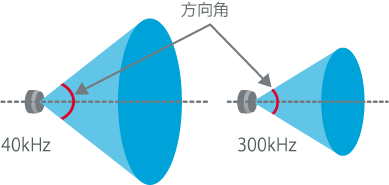
當然,實際將聲波應用在探測中,還必須對其方向性、分辨率和頻率衰減有更詳細的了解和建模。 ◆方向性 超聲波傳感器具有從頂部表面開始的圓錐形方向性,將方向性定義為從正面聲壓到-6dB。與光學傳感器相比,方向性更寬,但是具有頻率越高則方向性越尖銳的特征。
◆分辨率:頻率越高則分辨率越高。 ◆衰減:頻率越高則衰減越大,到達距離越短。
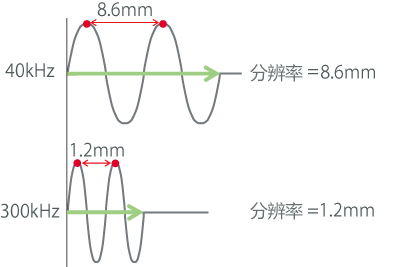
超聲波具有傳播速度因傳播介質而異、方向性和分辨率因頻率而異的特性。這些性能會影響測量距離、精度和檢測范圍。
3
超聲波的應用
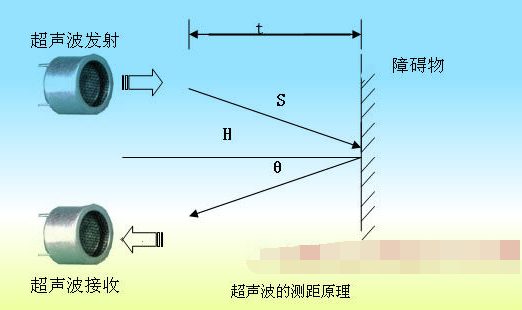
由于超聲波的傳播速度因介質而異,導致在介質之間發生超聲波透射或反射。可以主要通過使用這種反射來檢測物體的存在、狀態和距離。 比如,距離可以通過測量超聲波反射時間來計算:測量從發射開始到接收到反射波為止的時間,然后:時間x音速=到物體的距離(往返)。
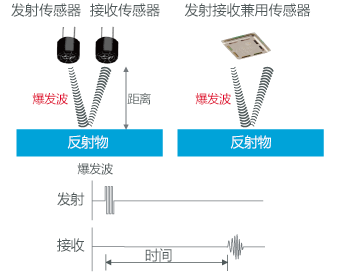
超聲波檢測距離的原理示意 由于不受顏色的影響,因此,即使是透明玻璃和亞克力,也可以作為反射介質,不用識別反射材料的顏色等物理表觀性質。這是超聲波傳感與攝像機在車載應用中的一個顯著區別。 應用相同傳播原理,通過識別是否有反射波可以檢測物體是否存在。因此,可以用無接觸方式檢測物體是否存在,可以在方向性范圍內大范圍檢測是否存在物體。 超聲波還可以通過聲波的波動檢測運動物體。 這是因為移動物體對波產生多普勒效應,反射波和直達波頻率不再相同。當發射和接受分別使用不同的傳感器時,反射波和直達波的合成信號產生變化,利用這個聲場變化就能檢測到運動。 下面,我們看看超聲波傳感器在汽車上的應用。
視頻2. 村田三端子超聲波傳感器提升ADAS體驗
4
汽車PAS應用
超聲波傳感器是最早的輔助駕駛應用。汽車的停車輔助系統(PAS)使用超聲波傳感器測量車輛與障礙物(例如墻壁)的距離,并將接近程度通知駕駛員。
PAS系統工作原理大致分為以下三步:
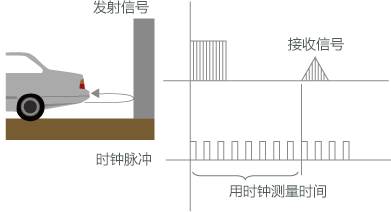
發射脈沖信號,超聲波從障礙物反射,根據到接收到反射波為止的時間測量距離。
發射脈沖信號時,將發送時鐘脈沖,并使用時鐘測量時間。
反射時間(s) x 音速(340m/s)=到障礙物的距離(往返)
PAS應用所需的特性,不僅是要能夠即時檢測到后方的墻壁等大面積的障礙,還需要判斷“緣石”的影響;另外,車載超聲波傳感器要盡量以一個裝置去覆蓋最大的面積,以減少裝置數量; 最后,PAS系統還需要能夠檢測到極端靠近的距離,這對所使用的超聲波傳感器的方向性能提出更高要求,即垂直方向上較窄,在水平方向上較寬,而余響時間更短。
5
汽車ADAS應用
自動駕駛Level 3是ADAS技術的關鍵環節(視頻1)。從ADAS Level3開始,車輛就被真正“交給”了軟件、算法、和傳感器,產品和技術的性能、可靠性和精度舉足輕重。而實際上,現有的行業技術能力仍可能帶來誤差和不精準,不能避免意料之外的路況造成的事故。
而當ADAS進入Level 4(高階自動駕駛),駕駛員將很少參與駕駛過程,車輛進入全自動的巡航狀態,ADAS需要實時監測車輛的周圍環境,使用各種傳感器,比如雷達、激光雷達、攝像機、超聲波傳感器。
此時,不僅對單個傳感器的性能和品質有非常高的要求,還需要進行軟件/算法的組合,通過組合、優化、綜合分析各種傳感器的數據,擴大檢測范圍,縮短盲區,提高自主駕駛的安全性。
村田的傳感技術和壓電陶瓷處理技術,很早即應用在停車輔助系統(PAS),村田的超聲波傳感器在距離車輛幾米范圍內發揮監測作用,早已用于自動停車系統,包括低速自動駕駛。
進入高端自動駕駛時代,為了提高安全性,汽車行業對超聲波傳感器的要求也越來越高,不僅需要提高產品本身的可靠性,擴大檢測范圍(特別是汽車周圍近距離),而且,為了快速檢測汽車周圍情況,還需要通過Coding技術實現多個超聲波探頭同時檢測周圍環境。 為了應對市場需求,實現超聲波傳感器優異的耐久性,穩定的近距離檢測,村田近年來從產品的構造,制程開始進行改善。目標是,單個超聲波探頭的近距離檢測,從目前的25cm縮短到10cm以下。
村田在實現10cm以下的檢測上使用了主動阻尼技術,大大提高短距離檢測能力。
主動阻尼技術提高短距離檢測能力(請參考視頻2)
通過抑制超聲波發射后的余震時間,可以檢測到10cm以下距離處反射回來的回波信號。
村田近距離超聲波傳感器產品目前的實驗結果示例
在不久的將來,村田計劃向市場提供這種技術的產品。
原文標題:關于ADAS中的超聲波傳感器,想知道的都在這兒~
文章出處:【微信公眾號:村田中文技術社區】歡迎添加關注!文章轉載請注明出處。
-
傳感器
+關注
關注
2548文章
50689瀏覽量
752028 -
超聲波
+關注
關注
63文章
2990瀏覽量
138237 -
adas
+關注
關注
309文章
2168瀏覽量
208525
原文標題:關于ADAS中的超聲波傳感器,想知道的都在這兒~
文章出處:【微信號:murata-eetrend,微信公眾號:murata-eetrend】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論