") 電池SOC 估算方法中卡爾曼濾波器法
電池SOC 估算方法中卡爾曼濾波器法
本期主要介紹的是電池SOC 估算方法中的第三種方法的剩余部分——卡爾曼濾波器法。我們一起來學(xué)習(xí)吧!
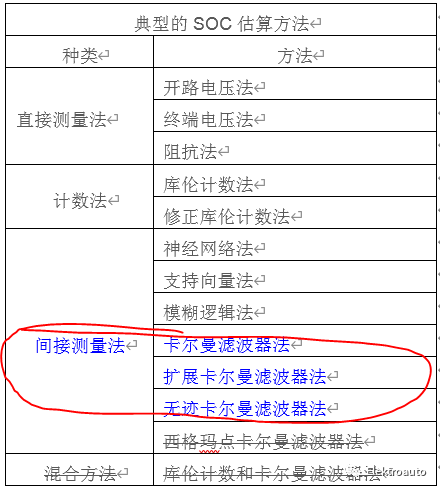
還是先上圖簡單說明下本期文章主要介紹的SOC估算方法(藍(lán)字部分為本期主要講述方法):

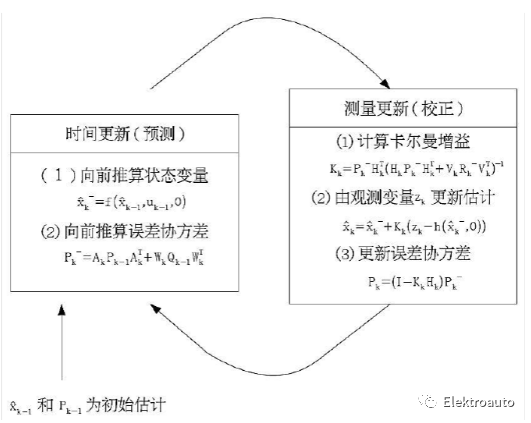
卡爾曼濾波器卡爾曼濾波器(Kalman Filter- KF)是一種公認(rèn)的可以用來估算動態(tài)線性系統(tǒng)的內(nèi)部狀態(tài)的技術(shù)。基本上,KF 是一組遞歸方程,它由兩部分組成:
預(yù)測步驟:用于預(yù)測系統(tǒng)的輸出;
系統(tǒng)狀態(tài)、誤差和修正步驟:基于系統(tǒng)的輸出來修正當(dāng)前狀態(tài)的估算值。
KF 濾波過程如下圖所示:
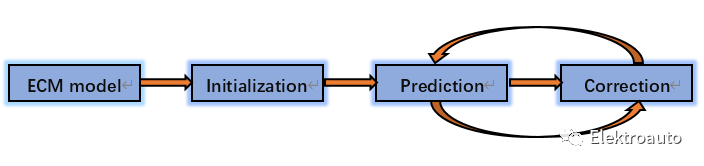
為了使用KF 來估算電池SOC,電池的狀態(tài)空間模型使用ECM 來搭建。考慮到系統(tǒng)噪聲和觀察噪聲,搭建了離散狀態(tài)空間模型。由于OCV(由二階RC ECM中的電壓源來表示)和電池的SOC 具有非線性關(guān)系,并且KF 算法只適用于線性系統(tǒng),所以線性化的方法作為輔助部分應(yīng)該具有可以接受的精度。作為線性化過程的結(jié)果,我們可以把離散的狀態(tài)空間模型方程簡化為更簡單的條件。可測量值和系統(tǒng)狀態(tài)變量之間的廣義誤差(比如:SOC),使用輸出方程來計(jì)算KF。然后將卡爾曼增益調(diào)整為更新的系統(tǒng)變量(SOC)。 由于電池系統(tǒng)的高度非線性特性和電池模型的不匹配,KF 方法可能會輸出不準(zhǔn)確的結(jié)果。通常來說,當(dāng)電流作為輸入時(shí),終端電壓會被作為輸出,這時(shí)候的電池SOC 就被看成是隱藏的狀態(tài),這個隱藏狀態(tài)就是通過KF/EKF/UKF/PF來估算的。
擴(kuò)展卡爾曼濾波器擴(kuò)展卡爾曼濾波器(Extended Kalman Filter- EKF)是KF 的改進(jìn)版本,它使用狀態(tài)空間模式來估算非線性動態(tài)系統(tǒng)的內(nèi)部狀態(tài)。簡單來說,就是根據(jù)以前的數(shù)據(jù)來預(yù)測系統(tǒng)未來的狀態(tài)。當(dāng)它被用來估算SOC 的時(shí)候,它使用了先進(jìn)的電池電芯模型并且需要相對比較高的計(jì)算能力。
EKF 由兩個方程式組成:
第一個方程是由使用ECM的參數(shù)構(gòu)造的矩陣,以及系統(tǒng)狀態(tài)(SOC)矩陣、可測輸入矩陣和不可測的過程噪聲;
第二個方程是測量方程,它展示了根據(jù)系統(tǒng)的狀態(tài)向量,可測量的輸入矩陣和測量噪聲得出的輸出電壓。
我們可以使用適當(dāng)?shù)能浖ぞ邅砉浪鉙OC。(MATLAB-Simulink)
在某些EKF 方法中,建立一個內(nèi)部濾波器來調(diào)整SOC,一個外部濾波器用來調(diào)整電池模型。
根據(jù)SOC 和電芯的模型,內(nèi)部濾波器使用測量的電流值來預(yù)估相應(yīng)的電壓。SOC通過測量的電壓值和預(yù)估的電壓值對比后進(jìn)行調(diào)整。因此,系統(tǒng)的反饋是電壓,輸出是SOC。在通過長時(shí)間的監(jiān)測外加的電流和電壓后,外部的濾波器會逐步地調(diào)整系統(tǒng)模型的參數(shù)。通過這種方法,我們可以實(shí)時(shí)地檢測和模型化電芯的老化和其他生命周期的影響。為了從EKF 的方法中得到更好的結(jié)果,我們必須建立一個精確的電池模型,并且視為非線性時(shí)變動態(tài)系統(tǒng)。最常用的模型是Shepherd Mode,Unnewehr Model,Nernst Model,Linear Model,Thevenin Model 和RC Model。
EKF 模型不僅可以用來在線估算電池SOC 和跟蹤電池充電狀態(tài)參數(shù),還可以用來識別電池模型的參數(shù)。
無跡卡爾曼濾波器由于鋰離子電池系統(tǒng)的SOC 具有高度的非線性特性,所以EKF 方法可能會產(chǎn)生一個很大的誤差,因?yàn)楸平€性函數(shù)是一節(jié)或者二階泰勒級數(shù)的展開。除了上述的缺點(diǎn)之外,EKF 方法還必須計(jì)算Jacobian Matrix(雅克比矩陣),并且如果系統(tǒng)包含非高斯噪聲,那么產(chǎn)生的結(jié)果可能是不可接受的。因此我們建立無跡卡爾曼濾波器(Unscented Kalman Filter- UKF)來提高KF 和EKF 方法的精度。由于UKF 也計(jì)算非高斯噪聲,并且不用計(jì)算雅克比矩陣,因此更適用于估算電池SOC。
在這種方法中,電池的SOC 被選為狀態(tài)向量的元素。在建議的UKF 方法中的兩個子模型是過程模型和測量模型,它是用來形容電池SOC 和電芯狀態(tài)(比如:電流、終端電壓、溫度)之間的關(guān)系的。
以上就是本期對SOC估算算法里的卡爾曼濾波器法的簡單介紹,下期文章將繼續(xù)為大家?guī)硪陨瞎浪惴椒ǖ膬?yōu)缺點(diǎn)總結(jié)以及簡單的卡爾曼濾波算法的實(shí)現(xiàn)(只為學(xué)習(xí)了解KF 原理使用)。我們下期再見啦! 為了防止有的小伙伴沒有看到系列文章的前幾篇,特附上前面原文鏈接: BMS算法設(shè)計(jì)之電池SOC介紹(一) BMS算法設(shè)計(jì)之SOC估算方法(二) BMS算法設(shè)計(jì)之SOC估算方法(三) 如果有不同的看法歡迎掃描下方的二維碼關(guān)注本公眾號,我們期待著和大家一同交流。 參考資料:知網(wǎng)、Energy期刊、相關(guān)書籍等
免責(zé)聲明:本文章中部分圖片來源于網(wǎng)絡(luò),內(nèi)容是由小編閱讀大量書籍和期刊總結(jié)整理而成,免費(fèi)分享知識,如涉及版權(quán)問題,請與我們聯(lián)系,第一時(shí)間做刪除處理。
原文標(biāo)題:BMS算法設(shè)計(jì)之SOC估算方法(四)
文章出處:【微信公眾號:汽車電子硬件設(shè)計(jì)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
soc
+關(guān)注
關(guān)注
38文章
4122瀏覽量
217940 -
bms
+關(guān)注
關(guān)注
106文章
974瀏覽量
65742 -
電池
+關(guān)注
關(guān)注
84文章
10461瀏覽量
129010
原文標(biāo)題:BMS算法設(shè)計(jì)之SOC估算方法(四)
文章出處:【微信號:QCDZYJ,微信公眾號:汽車電子工程知識體系】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
卡爾曼濾波器的特性及仿真

emi濾波器是什么濾波器
貝葉斯濾波和卡爾曼濾波的區(qū)別
卡爾曼濾波的優(yōu)缺點(diǎn)有哪些
高通濾波器和低通濾波器判別方法
卡爾曼濾波是什么 卡爾曼濾波與目標(biāo)追蹤技術(shù)分析

什么是低通濾波器?低通濾波器有什么作用?

高通濾波器、低通濾波器、帶通濾波器怎樣測幅頻特性?
卡爾曼濾波算法c語言實(shí)現(xiàn)方法

5g濾波器調(diào)試方法
5g濾波器調(diào)試方法有哪些
卡爾曼濾波算法的基本原理
卡爾曼濾波五個公式
卡爾曼濾波的原理和C代碼






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論