 在Keil C51軟件中51單片機的中斷服務和外設驅動程序的開發
在Keil C51軟件中51單片機的中斷服務和外設驅動程序的開發
在嵌入式應用中,使用RTOS的主要原因是為了提高系統的可靠性,其次是提高開發效率、縮短開發周期。
μC/OS-II是一個占先式實時多任務內核,使用對象是嵌入式系統,對源代碼適當裁減,很容易移植到8“32位不同框架的微處理器上。但μC/OS-II僅是一個實時內核,它不像其他實時操作系統(如嵌入式Linux)那樣提供給用戶一些API函數接口。在μC/OS-II實時內核下,對外設的訪問接口沒有統一完善,有很多工作需要用戶自己去完成。串口通信是單片機測控系統的重要組成部分,異步串行口是一個比較簡單又很具代表性的中斷驅動外設。本文以單片機中的串口為例,介紹μC/OS—II下編寫中斷服務程序以及外設驅動程序的一般思路。
1 μC/OS-II的中斷處理及51系列單片機中斷系統分析
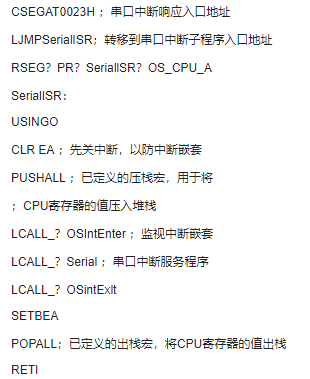
μC/OS-II中斷服務程序(ISR)一般用匯編語言編寫。以下是中斷服務程序的步驟。
保存全部CPU寄存器;調用OSIntEnter()或OSIntNesting(全局變量)直接加1;
執行用戶代碼做中斷服務;
調用0SIntExit();
恢復所有CPU寄存器;
執行中斷返回指令。
μC/OS-II提供兩個ISR與內核接口函數;OSIntEnter()和OSIntExit()。OSIntEnter()通知μC/OS—II核,中斷服務程序開始了。事實上,此函數做的工作是把一個全局變量OSIntNesting加1,此中斷嵌套計數器可以確保所有中斷處理完成后再做任務調度。另一個接口函數OSIntExit()則通知內核,中斷服務已結束。根據相應情況,退回被中斷點(可能是一個任務或者是被嵌套的中斷服務程序)或由內核作任務調度。
用戶編寫的ISR必須被安裝到某一位置,以便中斷發生后,CPU根據相應的中斷號運行準確的服務程序。許多實時操作系統都提供了安裝和卸載中斷服務程序的API接口函數,但μC/OS—II內核沒有提供類似的接口函數,需要用戶在對CPU的移植中自己實現。這些接口函數與具體的硬件環境有關,接下來以51單片機下的中斷處理對此詳細說明。
51單片機的中斷基本過程如下:CPU在每個機器周期的S5P2時刻采樣中斷標志,而在下一指令周期將對采樣的中斷進行查詢。如果有中斷請求,則按照優先級高低的原則進行處理。響應中斷時,先置相應的優先級激活觸發器于相應位,封鎖同級或低級中斷,然后根據中斷源類別,在硬件控制下,將中斷地址壓入堆棧,并轉向相應的中斷向量入口單元。通常在入口單元處放一跳轉指令,轉向執行中斷服務程序.當執行中斷返回指令RETI時,把響應中斷時所置位的優先級激活觸發器清零后,從堆棧中彈出被保護的斷點地址,裝入程序計數器PC,CPU返回原來被中斷處繼續執行程序。
在移植的過程中,采用Keil C51作為編譯環境。KeilC5l集成C編譯和匯編器。中斷子程序用匯編語言編寫,放到移植μC/0S—II后的OS_CPU_A.ASM匯編文件中。下面是以串行口中斷為例的移植中斷服務子程序代碼。
2 串口驅動程序
筆者已在5l單片機上成功移植了μC/0S-II內核,移植過程在此不再討論。這里重點分析μC/0S—II內核下串口驅動程序編寫。
由于串行設備存在外設處理速度和CPU速度不匹配的問題,所以需要一個緩沖區.向串口發送數據時,只要把數據寫到緩沖區中,然后由串口逐個取出往外發。從串口接收數據時,往往等收到若干個字節后才需要CPU進行處理,所以這些預收的數據可以先存于緩沖區中。實際上,單片機的異步串口中只有兩個相互獨立、地址相同的接收、發送緩沖寄存器SBUF。在實際應用中,需要從內存中開辟兩個緩沖區,分別為接收緩沖區和發送緩沖區。這里把緩沖區定義為環形隊列的數據結構。
μC/OS-II內核提供了信號量作為通信和同步的機制,引入數據接收信號量、數據發送信號量分別對緩沖區兩端的操作進行同步。串口的操作模式如下:用戶任務想寫,但緩沖區滿時,在信號量上睡眠,讓CPU運行別的任務,待ISR從緩沖區讀走數據后喚醒此睡眠的任務;同樣,用戶任務想讀,但緩沖區空時,也可以在信號量上睡眠,待外部設備有數據來了再喚醒。由于μC/OS-II的信號量提供了超時等待機制,串口當然也具有超時讀寫能力。
數據接收信號量初始化為0,表示在環形緩沖區中無數據。
接收中斷到來后,ISR從UART的接收緩沖器SBUF中讀入接收的字節(②),放入接收緩沖區(③),然后通過接收信號量喚醒用戶任務端的讀操作(④、①)。在整個過程中,可以查詢記錄緩沖區中當前字節數的變量值,此變量表明接收緩沖區是否已滿。UART收到數據并觸發了接收中斷,但如果此時緩沖區是滿的,那么放棄收到的字符。緩沖區的大小應合理設置,降低數據丟失的可能性,又要避免存儲空間的浪費。
發送信號量初始值設為發送緩沖區的大小,表示緩沖區已空,并且關閉發送中斷。發送數據時,用戶任務在信號量上等待(①)。如果發送緩沖區未滿,用戶任務向發送緩沖區中寫入數據(②)。如果寫入的是發送緩沖區中的第一個字節,則允許發送中斷(②)。然后,發送ISR從發送緩沖區中取出最早寫入的字節輸出至UART(④),這個操作又觸發了下一次的發送中斷,如此循環直到發送緩沖區中最后一個字節被取走,重新關閉發送中斷。在ISR向UART輸出的同時,給信號量發信號(⑤),發送任務據此信號量計數值來了解發送緩沖區中是否有空間。
3 串口通信模塊的設計
每個串行端口有兩個環狀隊列緩沖區,同時有兩個信號量:一個用來指示接收字節,另一個用來指示發送字節。每個環狀緩沖區有以下四個要素:
◇存儲數據(INT8U數組);
◇包含環狀緩沖區字節數的計數器;
◇環狀緩沖區中指向將被放置的下一字節的指針;
◇環狀緩沖區中指向被取出的下一字節的指針。
SerialGetehar()用來獲取接收到的數據,如果緩沖區已空時將任務掛起,接收到字節時,任務將被喚醒,同時從串行口接收字節。SerialPutRxChar()用來將接收的字節放到緩沖區中,如果接收緩沖區已滿,則該字節被丟棄。當字節插入到緩沖區中,SerialPutRxChar()通知數據接收信號量,使之將數據己到的消息傳達給所有等待的任務。為防止掛起應用任務,可以通過調用SceiallsEmPty()去發現環狀隊列中是否有字節。
當需要發送數據給串行端口時,SerialPurChar()等待信號量在初始化發送信號量時應該初始為緩沖區的大小。因此,當緩沖區中沒有更多空間時,SerialPutChar()就掛起任務,只要UART再次發送字節,掛起任務就將恢復。SerialGctChar()被中斷服務程序調用,如果發送緩沖區至少還有一個字節,Seri-a1GetChar()就返回一個從緩沖區發送的字節。如果緩沖區己空,則SerialGetChar()返回Null,這將使調用停止進一步的發送中斷,一直到有數據發送為止。
4 異步串行通信的接口函數
應用任務可以通過如下的幾個函數來控制和訪問UART:SerialCfgPort()、SerialGetChar()、SerialInit()、SerialIsEmpty()、SerialIsFull()和SerialPutChar()。
SerialCfgPort()用于建立串行端口的特征,在為指定端口調用其他服務前,必須先調用該函數,包括確定波特率、比特數、奇偶校驗和停止位等。
SerialGetChar()使應用程序從接收數據的環狀緩沖區中取出數據。
SerialInit()用于初始化整個串口軟件模塊,且必須在該模塊提供的其他任何服務前調用。SeriallInit()將環狀緩沖區計數器的字節數清零,并初始化每個環狀緩沖區的IN和OUT指針,指向數據存儲區的開始處。數據接收信號量初始化為0,表示在環狀緩沖區無數據。用傳送緩沖區大小初始化數據傳送信號量,表示緩沖區已空。
SerialIsEmpty()允許應用程序確定是否有字節從串口接收進來。本函數允許在無數據時避免將任務掛起。
SerialIsFull()允許應用程序確定傳送環狀緩沖區的狀態,本函數可以在緩沖區已滿時避免將任務掛起。
SerialPutChar()允許應用程序向一個串行端口發送數據。
結 語
該串口通信模塊充分利用了實時內核的任務調度功能和信號量機制,系統軟件模塊化,可讀性增強,便于修改和移植,其設計思路和方法可以很好的應用在多種情況下的測控系統中,系統的擴展方便,具有一定的借鑒作用。該串口通信模塊已作為某鐵路供水遠程控制終端的一部分,運行穩定,提高了整個系統的運行效率和實時性。
-
單片機
+關注
關注
6032文章
44514瀏覽量
632971 -
寄存器
+關注
關注
31文章
5317瀏覽量
120003 -
cpu
+關注
關注
68文章
10824瀏覽量
211140
發布評論請先 登錄
相關推薦
Keil C51單片機/arm開發工具 V8.02

Keil C51教程之Keil C51入門使用教程詳細圖解免費下載
C51單片機開發工具Keil.UV4應用程序免費下載
【轉載】配置Keil C51配置開發 STC51單片機過程

單片機C51和stem32程序編譯與仿真操作
單片機軟件安裝Keil C51





 工商網監
工商網監
評論