") 一文詳解伺服電機(jī)與伺服控制器
一文詳解伺服電機(jī)與伺服控制器
伺服的結(jié)構(gòu)是怎樣的?一個(gè)最簡(jiǎn)易的伺服控制單元,就是一個(gè)伺服電機(jī)加伺服控制器,今天就來解析下伺服電機(jī)與伺服控制器。
電機(jī)動(dòng)作的原理
右手螺旋法則(安培定則)——通電生磁
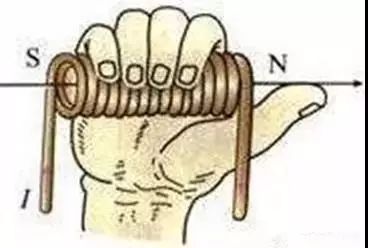
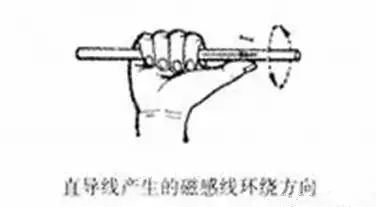
安培定則,也叫右手螺旋定則,是表示電流和電流激發(fā)磁場(chǎng)的磁感線方向間關(guān)系的定則。通電直導(dǎo)線中的安培定則:用右手握住通電直導(dǎo)線,讓大拇指指向電流的方向,那么四指的指向就是磁感線的環(huán)繞方向;通電螺線管中的安培定則:用右手握住通電螺線管,使四指彎曲與電流方向一致,那么大拇指所指的那一端是通電螺線管的N極。
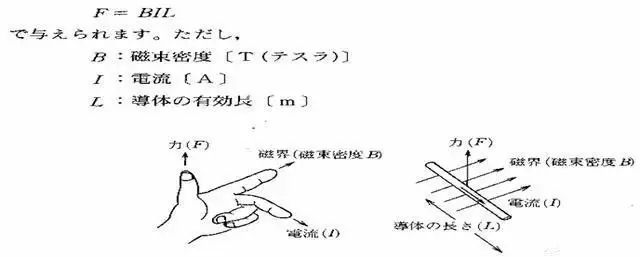
弗來明左手法則——磁生力
確定載流導(dǎo)線在外磁場(chǎng)中受力方向的定則。又稱電動(dòng)機(jī)定則。左手平展,大拇指與其余4指垂直,手心沖著N級(jí),4指為電流方向,大拇指為載流導(dǎo)線在外磁場(chǎng)中受力方向。
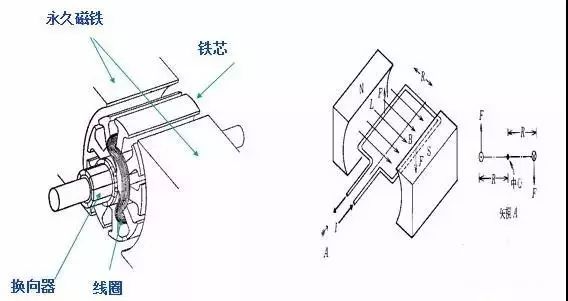
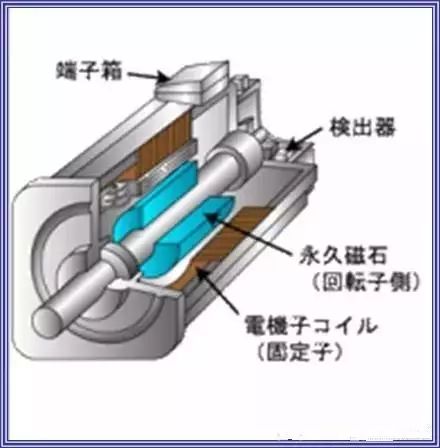
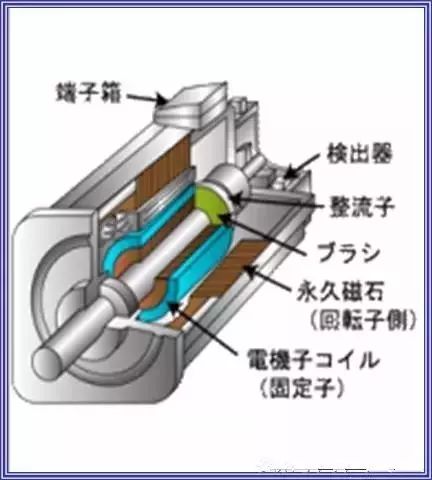
DC伺服馬達(dá)結(jié)構(gòu)
伺服控制單元
※ SERVO 語源自拉丁語,原意為“奴隸”的意思,指經(jīng)由閉環(huán)控制方式達(dá)到一個(gè)機(jī)械系統(tǒng)的位置,扭矩,速度或加速度的控制,是自動(dòng)控制系統(tǒng)中的執(zhí)行單元,是把上位控制器的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。
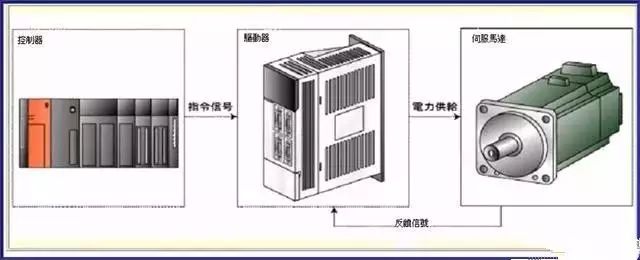
1.控制器:動(dòng)作指令信號(hào)的輸出裝置。
2.驅(qū)動(dòng)器:接收控制指令,并驅(qū)動(dòng)馬達(dá)的裝置。
3.伺服馬達(dá):驅(qū)動(dòng)控制對(duì)象、并檢出狀態(tài)的裝置。
伺服馬達(dá)的種類
伺服馬達(dá)的種類,大致可分成以下三種:
1.同步型:采用永磁式同步馬達(dá),停電時(shí)發(fā)電效應(yīng),因此剎車容易, 但因制程材料上的問題,馬達(dá)容量受限制。〔回轉(zhuǎn)子:永久磁鐵;固定子:線圈〕
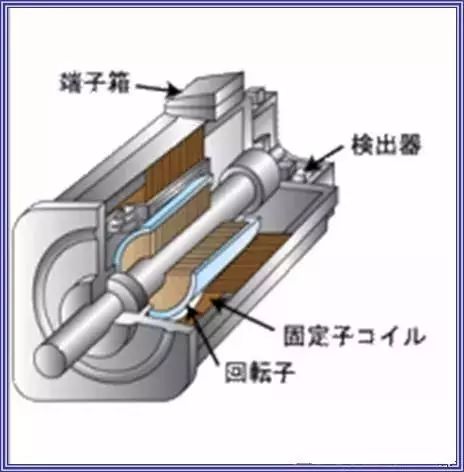
2.感應(yīng)型:感應(yīng)形馬達(dá)與泛用馬達(dá)構(gòu)造相似,構(gòu)造堅(jiān)固、高速時(shí)轉(zhuǎn)矩表現(xiàn)良好,但馬達(dá)較易發(fā)熱,容量(7.5KW以上)大多為此形式。回轉(zhuǎn)子、固定子皆為線圈〕
3.直流型:直流伺服馬達(dá),有碳刷運(yùn)轉(zhuǎn)磨耗所產(chǎn)生粉塵的問題,于無塵要求的場(chǎng)所就不宜使用,以小容量為主。〔回轉(zhuǎn)子:線圈;固定子:永久磁鐵;整流子:磁刷〕
SM 同 步 形 伺 服 馬 達(dá)
※特長(zhǎng)優(yōu)點(diǎn):1. 免維護(hù)。2. 耐環(huán)境性佳。3. 轉(zhuǎn)矩特性佳,定轉(zhuǎn)矩。4. 停電時(shí)可發(fā)電剎車。5. 尺寸小、重量輕。6. 高效率。
※缺點(diǎn):1. AMP較DC形構(gòu)造復(fù)雜。2. MOTOR及AMP必需1:1搭配使用。3. 永久磁石有消磁的可能。
IM 感 應(yīng) 形 伺 服 馬 達(dá)
※特長(zhǎng)優(yōu)點(diǎn):1. 維護(hù)容易。2. 耐環(huán)境性佳。3. 高速時(shí),轉(zhuǎn)矩特性佳。4. 可制做大容量,效率佳。5. 構(gòu)造堅(jiān)固。
※缺點(diǎn):1. 小容量機(jī)種,效率差。2. AMP較DC形構(gòu)造復(fù)雜。3. 停電時(shí),無法動(dòng)態(tài)剎車。4. 隨溫度變動(dòng)影響特性。5. AMP與MOTOR必需1:1使用。
DC 直 流 形 伺 服 馬 達(dá)
※特長(zhǎng)優(yōu)點(diǎn):1. 伺服驅(qū)動(dòng)器構(gòu)造簡(jiǎn)單。2. 停電時(shí)可發(fā)電剎車。3. 體積小、價(jià)格低。4. 效率佳。
※缺點(diǎn):1. 整流子外圍需定期保養(yǎng)。2. 碳刷磨耗產(chǎn)生(碳粉),無法應(yīng)用于要求凊絜的場(chǎng)所。3. 因整流器碳刷的問題,高速時(shí)轉(zhuǎn)矩差。4. 永久磁石有消磁的可能。
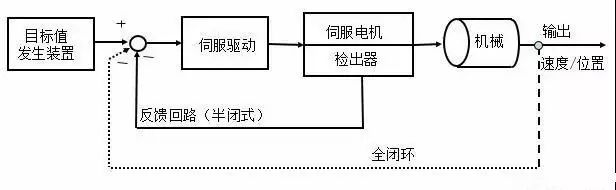
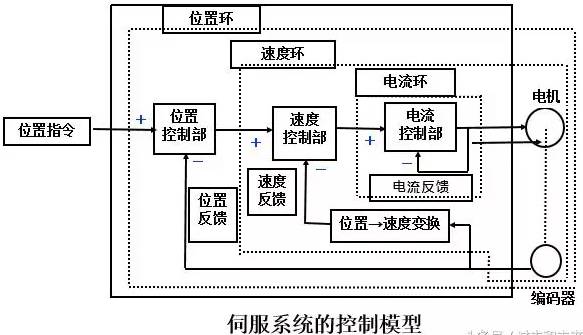
伺服的控制原理
伺服系統(tǒng)的最大特色:透過回饋信號(hào)的控制方式〔可做指令值與目標(biāo)值的比較,因而大幅減少誤差狀況〕。
何謂回饋信號(hào):向控制對(duì)象下達(dá)指令后,正確的追蹤并查明現(xiàn)在值,且隨時(shí)回饋控制內(nèi)容的偏差值、待目標(biāo)物到達(dá)目的地后,回饋位置值,如此反復(fù)動(dòng)作。
控制流程:檢測(cè)機(jī)械本體之位置檢出,回路為封閉系統(tǒng),稱之為全閉回路 。相反,檢測(cè)馬達(dá)軸端之回路系統(tǒng)就稱為半閉回路。
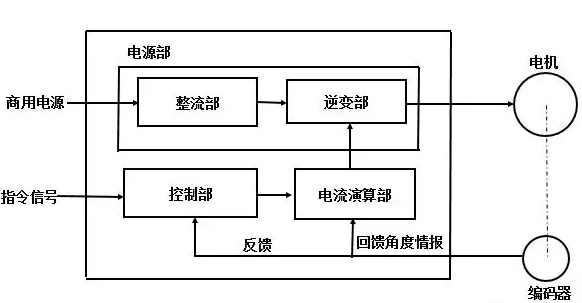
伺服驅(qū)動(dòng)器的內(nèi)部構(gòu)成
整流部:通過整流部,將交流電源變?yōu)橹绷麟娫矗?jīng)電容濾波,產(chǎn)生平穩(wěn)無脈動(dòng)的直流電源。
逆變部:由控制部過來的SPWM信號(hào),驅(qū)動(dòng)IGBT,將直流電源變?yōu)镾PWM波形,以驅(qū)動(dòng)伺服電機(jī)。
控制部分:伺服單元采用全數(shù)字化結(jié)構(gòu),通過高性能的硬件支持,實(shí)現(xiàn)閉環(huán)控制的軟件化,現(xiàn)在所有的伺服已采用(DSP數(shù)字信號(hào)處理)芯片,DSP,能夠執(zhí)行位置、速度、轉(zhuǎn)矩和電流控制器的功能。給出PWM信號(hào)控制信號(hào)作用于功率驅(qū)動(dòng)單元,并能夠接收處理位置與電流反饋,具有通訊接口。
編碼器:伺服電機(jī)配有高性能的轉(zhuǎn)角測(cè)量編碼器,可以精確測(cè)量轉(zhuǎn)子的位置與電機(jī)的轉(zhuǎn)速,
逆變器采用新型電力電子半導(dǎo)體器件,目前,伺服控制系統(tǒng)的輸出器件越來越多地采用開關(guān)頻率很高的新型功率半導(dǎo)體器件,主要有大功率晶體管(GTR)、功率場(chǎng)效應(yīng)管(MOSFET)和絕緣門極晶體管(IGPT)等。這些先進(jìn)器件的應(yīng)用顯著地降低了伺服單元輸出回路的功耗,提高了系統(tǒng)的響應(yīng)速度,降低了運(yùn)行噪聲。
尤其值得一提的是,最新型的伺服控制系統(tǒng)已經(jīng)開始使用一種把控制電路功能和大功率電子開關(guān)器件集成在一起的新型模塊,稱為智能控制功率模塊(Intelligent Power Modules,簡(jiǎn)稱IPM)。這種器件將輸入隔離、能耗制動(dòng)、過溫、過壓、過流保護(hù)及故障診斷等功能全部集成于一個(gè)不大的模塊之中。其輸入邏輯電平與TTL信號(hào)完全兼容,與微處理器的輸出可以直接接口。它的應(yīng)用顯著地簡(jiǎn)化了伺服單元的設(shè)計(jì),并實(shí)現(xiàn)了伺服系統(tǒng)的小型化和微型化。
-
控制器
+關(guān)注
關(guān)注
112文章
15874瀏覽量
175325 -
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2003瀏覽量
57298
原文標(biāo)題:工業(yè)機(jī)器人伺服結(jié)構(gòu)和原理
文章出處:【微信號(hào):robotqy,微信公眾號(hào):機(jī)械自動(dòng)化前沿】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一般的伺服電機(jī)多少錢_松下伺服電機(jī)價(jià)格
關(guān)于伺服電機(jī)、驅(qū)動(dòng)器、控制器的一些原理詳解
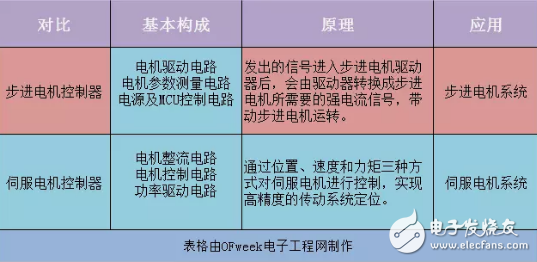
關(guān)于步進(jìn)電機(jī)控制器與伺服電機(jī)控制器的對(duì)比淺析
運(yùn)動(dòng)控制器控制伺服電機(jī)采用的指令和伺服電機(jī)調(diào)試的6個(gè)步驟說明
伺服電機(jī)控制器 VS 步進(jìn)電機(jī)控制器,有啥不一樣?
伺服控制器是伺服電機(jī)不可缺少的一部分
伺服控制器是怎么控制伺服電機(jī)的,原理是什么
伺服電機(jī)的工作原理 伺服電機(jī)的特點(diǎn)
伺服控制器是什么_伺服控制器用途
伺服控制器怎么調(diào)_伺服控制器和伺服驅(qū)動(dòng)器的區(qū)別
異步伺服電機(jī)如何配合伺服控制器精確控制電機(jī)軸?
基于FPGA的步進(jìn)電機(jī)伺服控制器設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論