") 點云匹配與ICP算法基本思想
點云匹配與ICP算法基本思想
點云匹配
圖像配準目的在于比較或融合。針對同一對象在不同條件下獲取的圖像,因為激光掃描光束受物體遮擋的原因,不可能通過一次掃描完成對整個物體的三維點云的獲取。因此需要從不同的位置和角度對物體進行掃描。三維匹配的目的就是把相鄰掃描的點云數(shù)據(jù)拼接在一起。三維匹配重點關(guān)注匹配算法,常用的算法有最近點迭代算法 ICP和各種全局匹配算法。
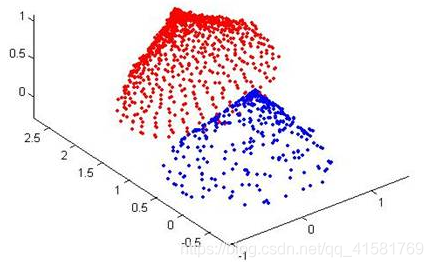
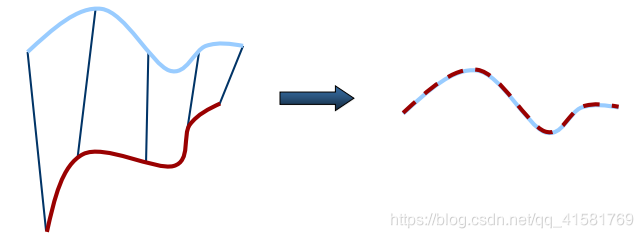
ICP(Iterative Closest Point迭代最近點)算法是一種點集對點集配準方法。如下圖所示,PR(紅色點云)和RB(藍色點云)是兩個點集,該算法就是計算怎么把PB平移旋轉(zhuǎn),使PB和PR盡量重疊。
ICP算法基本思想:
三維點云匹配問題的目的是找到P和Q變化的矩陣R和T,對于 ,,利用最小二乘法求解最優(yōu)解使:
最小時的R和T。
先對平移向量T進行初始的估算,具體方法是分別得到點集P和Q的中心:
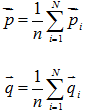
在計算轉(zhuǎn)換之前,從兩個點集中的每個點減去相應(yīng)的質(zhì)心。

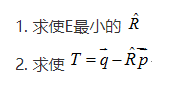
則上述最優(yōu)化目標函數(shù)可以轉(zhuǎn)化為:

最優(yōu)化問題分解為:
目標函數(shù)E(R,t)的優(yōu)化是ICP算法的最后一個階段。在求得目標函數(shù)后,采用什么樣的方法來使其收斂到最小,也是一個比較重要的問題。求解方法有基于奇異值分解的方法、四元數(shù)方法等。
ICP算法優(yōu)點:
可以獲得非常精確的配準效果
不必對處理的點集進行分割和特征提取
在較好的初值情況下,可以得到很好的算法收斂性
ICP算法的不足之處:
在搜索對應(yīng)點的過程中,計算量非常大,這是傳統(tǒng)ICP算法的瓶頸
標準ICP算法中尋找對應(yīng)點時,認為歐氏距離最近的點就是對應(yīng)點。這種假設(shè)有不合理之處,會產(chǎn)生一定數(shù)量的錯誤對應(yīng)點
-
算法
+關(guān)注
關(guān)注
23文章
4601瀏覽量
92673 -
ICP
+關(guān)注
關(guān)注
0文章
69瀏覽量
12763 -
點云
+關(guān)注
關(guān)注
0文章
58瀏覽量
3787
原文標題:點云匹配介紹與ICP算法
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
ICP元素分析
手寫圖像模板匹配算法在OpenCV中的實現(xiàn)

什么是三維點云分割
使用語義線索增強局部特征匹配

激光雷達點云數(shù)據(jù)包含哪些信息
友思特方案 基于三維點云實現(xiàn)PCB裝配螺絲視覺檢測

信號分析的基本思想是什么
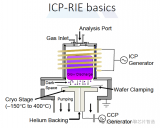
ICP-RIE機臺的原理是什么樣的?
如何提取、匹配圖像特征點
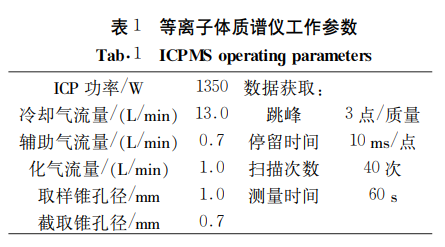
封閉壓力酸溶 ICP-MS法同時測定地質(zhì)樣品中 47個元素的評價
MINI54使用ICP和keil下載關(guān)機電流不同是為什么?
騰訊云和華為云的ingress路徑匹配規(guī)則把我繞暈了

STM32控制中常見的PID算法總結(jié)

天線匹配怎么調(diào)試諧振點電壓
OpenCV邊緣模板匹配算法原理詳解






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論