 掃地機器人正在使用的避障技術有哪些
掃地機器人正在使用的避障技術有哪些
現如今越來越多的家庭開始選擇使用掃地機器人來完成地面的清潔。
然而在使用過程當中,很多用戶都會發現多數掃地機器人的避障能力,以及避障能力所影響到的清潔效率往往參差不齊,有的掃地機器人經常會被地面上的障礙擋住,或者因為路線規劃的有問題而在桌椅板凳下無腦亂撞,影響掃地效率。
由此,一些掃地機器人稍弱的避障能力成為制約用戶體驗的重要痛點,引發過用戶“智障不避障”、人工智能成了“人工智障”的吐槽。
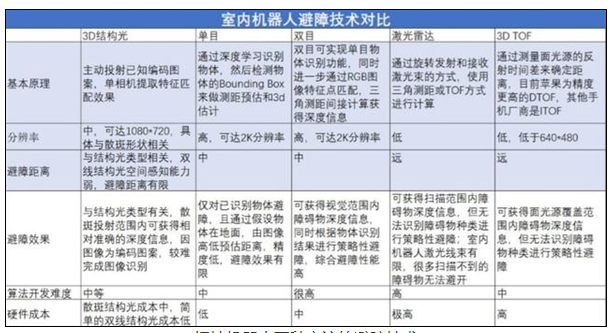
目前來看,被掃地機器人應用過或是正在使用的避障技術無非以下幾種:、3D 結構光避障、單目視覺避障、雙目視覺避障、激光雷達避障、3D TOF 避障,這些技術各自的特性以及相互之間的差異如下表所所示。
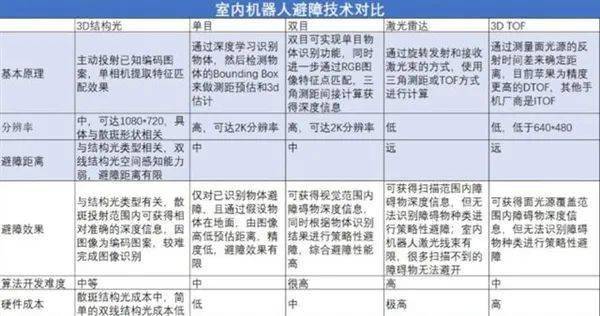
掃地機器人五種主流的避障技術
1、先說3D結構光方案,其原理是采用紅外光源,發射出來的光經過一定的編碼投影在物體上,這些圖案經物體表面反射回來時,隨著物體距離的不同會發生不同的形變,圖像傳感器將形變后的圖案拍下來。
隨后,通過計算拍下來的圖案里的每個像素的變形量,來得到對應的視差,進而得到深度值。不過結構光方案測距范圍受光斑圖案影響,避障范圍較小。強光環境下表現差,容易受光線影響。
2、3D TOF算是大家比較熟悉的方案了,它被iPad Pro用于實現AR玩法。它的工作原理是紅外光源發射高頻光脈沖到物體上,接著接收從物體反射回去的光脈沖,通過探測光脈沖的飛行(往返)時間來來計算被測物體離相機的距離。
然而3D ToF的劣勢對于掃地機器人而言太過致命——分辨率低,以致于圖像信息不易輔助避障,并不太適合用于掃地機器人。
3、激光雷達避障的原理是發射激光到物體表面,然后接收物體的反射光信號。而且激光避障的精度、反饋速度、抗干擾能力和有效范圍都要明顯優于紅外和超聲波。劣勢在于單束 LIDAR 通過旋轉可以掃描一個面的數據(LDS),無法完成對三維世界的感知。
即便是造價昂貴、不適于掃地機器人的多束激光組成陣列雷達,也只可獲得部分范圍內的三維地圖。顯然不能僅僅依靠激光雷達。
4、單目視覺識別系統的掃地機器人已經十分多見。單目較多單一的照片只具有二維信息,猶如2D電影,并無直接的空間感,只有靠我們自己依靠“物體遮擋、近大遠小”等生活經驗腦補,故單一的攝像頭獲取到的信息及其有限,并不能直接得到我們想要的效果。
類比到機器視覺中,單個攝像頭的圖片信息無法獲取到場景中每個物體與鏡頭的距離關系,即缺少第三個維度。現實生活中的場景極度復雜,單個攝像頭發生視覺誤算的概率非常大,可能會計算錯物體的實際距離。單目產品缺乏立體視覺,無法獲得第三個維度的信息,也就是景深信息。
所以搭載單個攝像頭的掃地機把所有物體都識別成二維物體,并不是三維立體,它只能對預先訓練好的物體進行估算,但實際家庭環境千差萬別,不可能對所有會造成卡困物體都進行訓練。所以相比較單目掃地機器人,我們更需要雙目掃地機器人的出現。
5、雙目
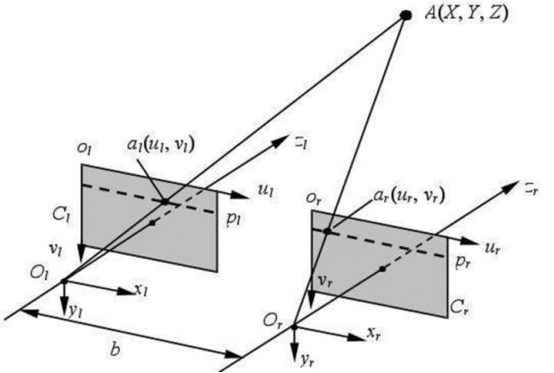
雙目技術原理
石頭科技近期推出的石頭掃地機器人T7 Pro采用的是LDS+雙目方案,將以上五種方案之中的兩種結合在一起。單說視覺部分,與單目相比,它的優勢在于能夠避障未識別過的物體,可以還原物體的景深信息。更好地采集的環境信息(測距避開通用障礙物,單目無此特性)。
而且結合 AI 物體識別算法,還能精準獲取的障礙物屬性信息,以此實現掃地機的主動智能避障,對不同障礙物采用不同的避障策略,評估避讓距離,以兼顧清掃覆蓋度和避障成功率。目前石頭掃地機器人T7 Pro已經支持體重秤、風扇/吧臺椅底座、鞋子、插線板、線團、“粑粑”等6 類物體。
值得一提的是,石頭掃地機器人T7 Pro可以實現全天候的避障,為了做到沙發底下,床底下,晚上等昏暗環境也能正常識別,其使用紅外光補光(紅外是不可見光,不會打擾用戶)。
石頭在攝像頭內部把IR-cut filter換成了RGB+IR雙通的濾波片。
白天強光下,紅外補光燈不打開,攝像頭內部的 Sensor 主要接收可見光;夜晚暗光下,紅外補光燈自動打開,攝像頭內部的 Sensor 主要接收紅外光。由此無論是白天還是夜間,避障、脫困都有了更加顯著的改善。
遇到障礙,搭載雙目系統的石頭掃地機器人T7 Pro不再會“橫沖直撞”,而是精準的描邊,保證清掃面積的同時讓自己能夠順利通過,不被卡死。
編輯:hfy
-
人工智能
+關注
關注
1791文章
46863瀏覽量
237589 -
激光雷達
+關注
關注
967文章
3940瀏覽量
189601 -
掃地機器人
+關注
關注
20文章
779瀏覽量
53369 -
3D ToF
+關注
關注
0文章
14瀏覽量
3312
發布評論請先 登錄
相關推薦
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
掃地機器人十大排名!了解掃地機器人哪個牌子好
掃地機器人如何選購?
掃地機器人方案
原來掃地機器人是這樣工作的!
智能掃地機器人解決方案
如何選擇好的掃地機器人
我們拆了一款Tof+AI避障的掃地機
掃地機器人實現避障原理
盤點掃地機器人五大主流的避障技術及相關作用






 工商網監
工商網監
評論