 linux系統和驅動中按鍵驅動的編寫詳解
linux系統和驅動中按鍵驅動的編寫詳解
引言
隨著深度學習和5G的應用,對FPGA的功能要求越來越多。因此近幾年FPGA大廠紛紛將自己的器件集成了更多的內核,比如賽靈思的zynq系列就集成了arm,GPU,PCIE,射頻處理模塊等等,用于滿足各種各樣的需求。出身FPGA的工程師們也必須擁抱這些變化,不僅僅要精通FPGA開發,還需要了解其他方面的知識。比如基于zynq的開發者,就需要了解arm,linux驅動以及linux系統。做深度學習加速的還需要了解深度學習網絡以及網絡壓縮等知識。學習這些知識會讓你的眼界更加開闊,會站得高看得遠,在開始一項任務的時候不再是盲人摸象,而是高瞻遠矚,把握全局。
這是我介紹linux系統和驅動的第4篇文章,如有不恰當的地方歡迎指正,因為本人也是處于學習入門階段。三人行,必有我師焉。討論的多了,問題也就清晰了。這一篇主要介紹按鍵驅動的編寫,了解中斷的處理過程,以及設備樹的修改。
1. vivado工程搭建
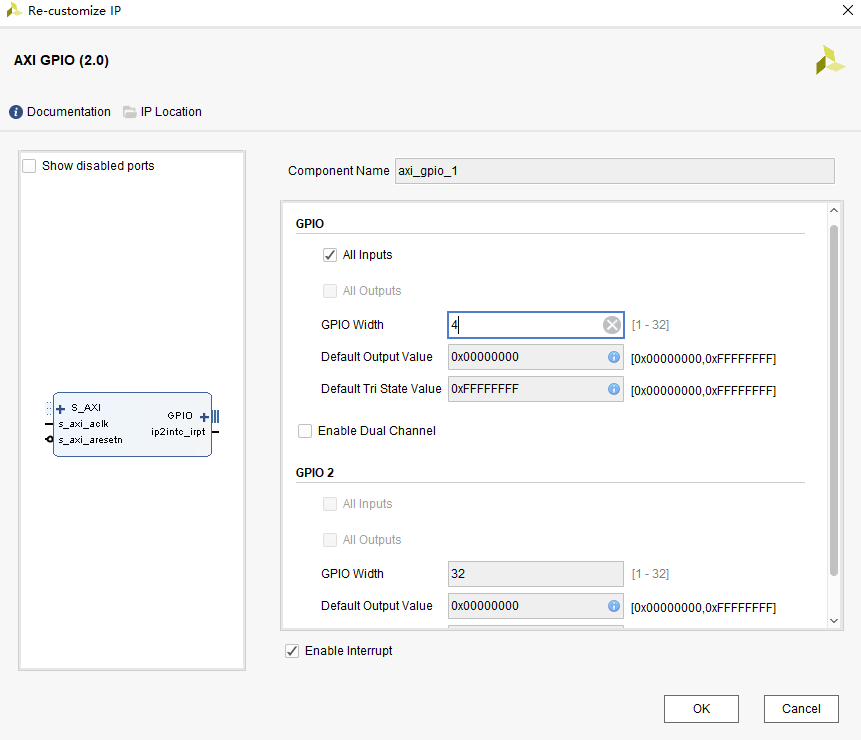
工程搭建很簡單,就是配置完zynq核的外設后,增加一個axi_gpio模塊,作為外部按鍵的接口。雖然按鍵并不是直接連接到arm的IO上,但是axi_gpio也被映射到zynq系統的內存空間中,linux驅動通過讀寫key對應的映射內存來控制和檢測。要檢測到key被按下我們必須開啟中斷,因此axi_gpio模塊設置如下圖。Address editor是gpio的對應的內存空間。Zynq已經為不同外設類型分配了可選的內存映射,通常工程建立完后,由軟件工具自行分配就好了。如果一些外設內存有沖突,是無法生成hdf的。

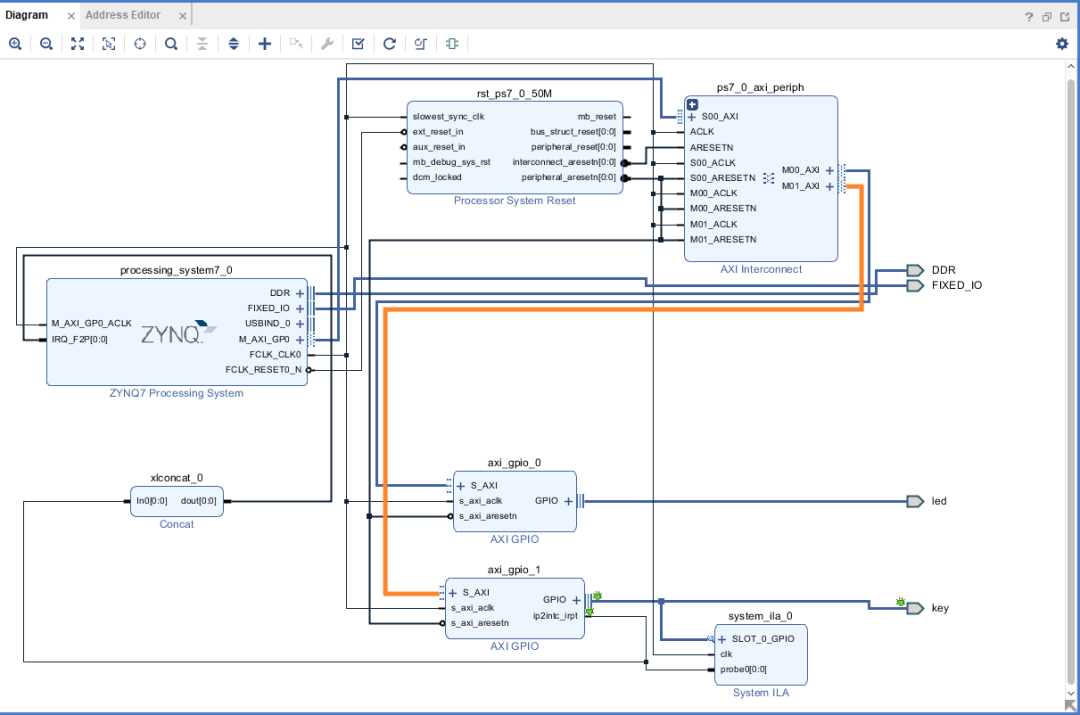
配置完成后,進行管腳約束,然后綜合實現,生成bit文件。再導出hdf文件,打開SDK來生成fsbl,u-boot還使用前幾篇介紹驅動中的u-boot。U-boot通常不會因為驅動的新增而修改。但是由于增加了key按鍵,我們需要去設備樹中修改對應的配置。
具體如何修改設備樹,可以到linux驅動文件夾Documentation/devicetree中去尋找對應的外設文件,其中有設備樹修改的介紹。Gpio的修改可以到gpio文件夾下的gpio-zynq.txt查看。其基本形式為:
gpio@e000a000 { #gpio-cells = <2>;
compatible = "xlnx,zynq-gpio-1.0";
clocks = <&clkc 42>;
gpio-controller;
interrupt-parent = <&intc>;
interrupts = <0 20 4>;
interrupt-controller;
#interrupt-cells = <2>;
reg = <0xe000a000 0x1000>; };
其中compatible主要是用于linux驅動去匹配設備樹中相應的節點,后面我們會介紹,這個名字和那一塊程序有關。主要是配置中斷,其中interrupts-cell指定了interrupts有多少個屬性。Interrupts的第一個屬性是中斷類型,第二個是中斷號,最后一個表示觸發類型:高電平觸發、低電平觸發、上升沿觸發和下降沿觸發四種類型。Interrupt-parent是中斷所屬的中斷控制器。我們在SDK中產生了設備樹,我們看到按鍵的相應節點位于amba_pl節點下,其中amba_pl是PL端的總線節點,而amba是PS端的總線節點,修改pl.dtsi中的gpio內容:

我們改了compitable的內容,同時要關注inerrupts,xlnx,all-inputs,xlnx,gpio-width這些屬性。Gpio-width是寬度,all-inputs是表示為輸入。
設備樹修改完后就可以編譯設備樹文件,然后用fsbl,u-boot,設備樹來制作boot.bin了。放到SD卡,啟動linux系統。接下來進入關鍵環節,key驅動的編寫。
2. 按鍵驅動代碼剖析
對于一個剛剛入門的人來說,其實了解了驅動的基本框架就好了。每個驅動都按照它的框架進行編寫和修改。能理解驅動的各個模塊功能,在驅動調試或者編寫中就能有的放矢。一個簡單的驅動的構成也很復雜,代碼也很多,篇幅有限,我只介紹主要部分。
1)platform框架
Platform是一種虛擬的平臺,提供了驅動和具體硬件交互的接口。Platform_device類似于虛擬的總線,IIC,LCD,GPIO等外設都可以看做platform_device,通過它可以遍歷所有的總線設備,而對應的驅動就是platform_driver。基本流程是:先注冊platform_device,再注冊platform_driver,然后匹配設備和驅動,最后注冊整個驅動。
在linux3以前的版本,需要定義platform_device結構體,然后通過platform_device_register函數來注冊設備。但是linux3.0以后出現了設備樹,內核函數of_platform_default_populate_init會在內核啟動后遍歷設備樹,自動注冊每個節點對應的設備。因此只需要修改設備樹參數就行了。首先看這個結構體:
static const struct of_device_id key_of_match[] __devinitdata={
{.compatible="xlnx,gpio-keys",},
{/*end of list*/},
};
這實際上定義了設備的匹配號,compatible就是在設備樹節點axi-gpio中對應的節點匹配名稱。我們只要讓compitable和設備樹中對應節點的值匹配上就可以將節點對應的設備注冊到總線上了。
platform_driver用于對設備的搜索和配置,主要就是去解析設備樹,根據設備樹中節點信息來填充設備結構體對應信息或者直接對設備完成配置。
static struct platform_driver key_driver={
.driver={
.name=DRIVER_NAME,
.owner=THIS_MODULE,
.of_match_table=key_of_match,
},
.probe=key_probe,
.remove=key_remove,
};
我們主要關注其三個變量,of_match_table就是of_device_id結構體定義的,用來匹配節點。Probe函數用來解析節點,配置設備。Remove主要是釋放在probe中使用的資源等。
編寫key驅動主要就是去填充probe和remove兩個函數。
來看probe函數是如何查找到設備的一些屬性的,比如我們要確定key鍵的數量,那么我們可以這樣來做:
if(of_property_read_u32(node, "xlnx,gpio-width", &width)){
printk(KERN_ERR "get the gpio-width/n");
}
通過匹配“xlnx,gpio-width”來獲得key的位寬,這個屬性就在設備中定義的。
如果我們要操作key,需要獲得key設備的內存映射空間,這個可以通過函數platform_get_resource函數來完成。
mem=platform_get_resource(pdev, IORESOURCE_MEM, 0);
if(!mem){
printk(KERN_ERR "get memory resource/n");
return -ENODEV;
}
第一個參數pdev是platform_device結構體,在進入probe函數之前就已經被注冊了,其指向的就是key對應的設備。第二個參數是類型,主要有IORESOURCE_MEM, IORESOURCE_IRQ等。最后一個參數是號碼,指示platform_device結構體中不同的資源類型,即IORESOURCE類型。
以上獲得的mem就是在設備樹中由reg指定的內存映射:
reg = <0x41210000 0x10000>;
中斷的獲得可以通過函數:
r_irq=irq_of_parse_and_map(node, 0);
if(!r_irq){
printk(KERN_ERR "get interrupt/n");
}
其中device_node就是設備節點,在platform_device注冊的時候,含有該節點,所以可以通過該結構體獲得。第二個參數表示一個設備樹節點有多個中斷時的索引。
通過設備樹獲得了硬件信息后,我們將其填充到key_device中,key_device定義如下:
struct key_dev{
struct cdev dev;
struct work_struct work;
int irq;
int major;
unsigned long start_addr;
unsigned long size;
void __iomem *baseaddr;
int width;
int inout;
int key_prs;
};
其中irq為中斷號,cdev是字符設備結構體,因為key等屬于字符設備。填充如下:
lp->start_addr=mem->start;
lp->size=mem->end-mem->start;
lp->irq=r_irq;
lp->width=width;
2)中斷處理
在platform中我們談到了對中斷號的獲取,那么取得了中斷號之后如何來檢測中斷事件呢?中斷處理過程可以被分成兩部分:頂半部和底半步。頂半部主要處理硬件上比較緊急的事物,比如檢測中斷,底半部用于處理中斷產生之后需要進行的事務處理。在底半部處理過程中不會耽誤檢測下一個中斷。這兩個部分不是絕對的,也可以只有一個部分。
驅動中首先需要定義一個中斷函數,用于中斷產生后進行的操作。然后申請中斷,實現函數:
err=request_irq(k_dev->irq,key_interrupt, IRQF_SHARED|IRQF_TRIGGER_RISING, DRIVER_NAME, k_dev);
第一個是中斷號,第二個為中斷處理函數,第三個參數為中斷產生類型,上升沿下降沿一類,第四個為名字,可以命名中斷,最后一個是設備結構體。
釋放中斷就通過free_irq(unsigned int irq, void *dev_id)來完成。
實現中斷底半部處理機制主要有tasklet,工作隊列,軟中斷和線程化irq。中斷機制較為復雜,任何一種機制都可以讓你竭盡腦汁。入門者還是循序漸進,所以我也只用了一種簡單的方法。類似鎖機制,我們定義一個事件:
static DECLARE_WAIT_QUEUE_HEAD(press_queue);
然后在中斷函數中喚醒這個事件,在其他函數中可以通過等待這個事件來進行中斷處理。我們的中斷函數為:
static irqreturn_t key_interrupt(int irq, void *dev_id) { struct key_dev *dev=dev_id; dev->key_prs++; printk(KERN_INFO "interruptted/n"); wake_up_interruptible(&press_queue); return IRQ_HANDLED; }
而等待該事件放在key_read函數中:
ssize_t key_read(struct file *filp, char __user *buf, size_t count, loff_t *fops)
{
int err;
struct key_dev *dev=filp->private_data;
wait_event_interruptible(press_queue, event_press);
event_press=0;
err=copy_to_user(buf, &dev->key_prs, count);
return err ? -EFAULT : 0;
}
3)文件結構
Linux一切皆文件,任何驅動最終都被封裝為一個文件,用戶空間通過讀寫文件來操作驅動。文件操作包括打開,關閉,讀和寫等。我們不做具體介紹,簡單列出文件結構體為:
struct file_operations key_fops={
.owner=THIS_MODULE,
.open=key_open,
.read=key_read,
.release=key_close,
};
總結
對以上進行總結就是:
1) 首先進行設備樹節點屬性修改;
2) 填充platform框架下的probe,remove等函數,并定義of_device_id和platform_driver結構體;
3) 申請中斷,釋放中斷,編寫中斷函數等;
4) 填充文件結構,編寫open,close,read等函數;
編輯:hfy
-
FPGA
+關注
關注
1626文章
21678瀏覽量
602047 -
Linux
+關注
關注
87文章
11232瀏覽量
208962 -
5G
+關注
關注
1353文章
48380瀏覽量
563463 -
深度學習
+關注
關注
73文章
5493瀏覽量
121001
發布評論請先 登錄
相關推薦


《Linux設備驅動開發詳解》第9章、Linux設備驅動中的異步通知與異步IO



Linux驅動開發-編寫按鍵驅動





 工商網監
工商網監
評論