 淺談機器人操作系統的演進升級
淺談機器人操作系統的演進升級
自20世紀80年代以來,軍用機器人逐漸得到廣泛應用,美軍的 “劍”、“魔爪”,俄軍的“平臺”、“阿爾戈”等機器人在走向硝煙彌漫的戰場后聲名大噪,助力一線作戰部隊效果顯著。如今,人們通常熟知這些戰爭“怪物”,而對于控制這些軍用機器人的“幕后英雄”——機器人操作系統,卻鮮有關注。
一、應運而生,演進升級
本世紀初,伴隨著機器人領域的快速發展和復雜化升級,程序代碼的復用性和模塊化需求日趨強烈,機器人行業中硬件的非標準化生產、軟件的編程代碼不通用等問題漸次凸顯,從實用性角度來看,機器人發揮作用的關鍵在于具備適應多樣復雜任務與環境的能力,而這一任務并非一己之功能夠完成的。歸結起來,機器人行業的發展應用需要可靠通用的軟件與標準化高效生產的硬件,由此,機器人操作系統應運而生。
機器人操作系統是編寫機器人軟件的靈活框架,是用于機器人的一種開源操作系統或次級操作系統,提供了一系列工具程序和庫用于獲取、建立、編寫和運行多機整合的程序和工具,提供的功能包括硬件抽象描述、共用功能執行、設備驅動、函數庫、可視化工具、消息傳遞和軟件包管理等等,其設計目標在于提高機器人研發代碼的復用率,簡化多種機器人平臺之間創建復雜性和魯棒性機器人行為的任務量。
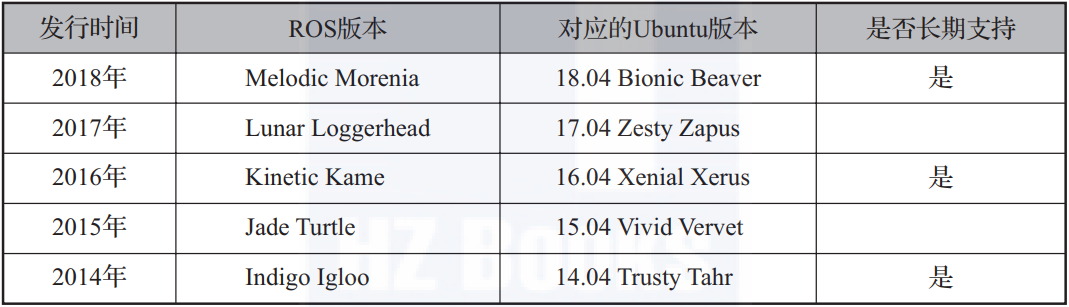
當前最通用的機器人三大操作系統為Ubuntu系統、Android系統和ROS(Robot Operating System)系統,其中Android系統使用率最高,而ROS系統則成為機器人研發領域的事實標準。相比于其它系統,ROS系統適用于協作式機器人軟件開發,具有點對點設計、多語言支持、精簡與集成、工具包豐富、免費且開源等優點,因此在諸多大學和研究機構被廣泛應用,已成為學術界指定的創新驗證平臺,并衍生出了ROS-I、ROS-A、ROS-DoE、ROS-M等多個版本,其中ROS-M是ROS系統的軍用版,主要應用在無人機領域。與其他操作系統相比,ROS系統的分布式和模塊化有效降低了人機交互機器人的開發難度,與未來機器人智能化、人機交互的發展趨勢相吻合,可能將成為最專業、最全面、功能最強大的機器人開發平臺。
二、聚焦實戰,基座創新
機器人操作系統是開發軍用機器人的基礎平臺。軍用機器人是用于完成以往由人員承擔軍事任務的自主式、半自主式或人工遙控的機械電子裝置,而機器人操作系統則運行在機器人之間,是管控機器人的軟件體系。操作系統使得每一位機器人設計師都能使用同樣的平臺進行機器人軟件開發,正因如此,開發新的操作系統直接關系機器人的更新換代。一直以來,世界主要軍事強國都將軍用機器人作為研究重點,五角大樓每年在軍用機器人領域投入數十億美元,當前美軍在此領域的開發與應用已涵蓋陸、海、空、天等各軍兵種,是世界上唯一具有綜合開發、試驗驗證和實戰應用能力的軍隊。俄羅斯則正在執行《2025年前未來軍用機器人技術裝備研發》綜合專項計劃,逐步構建軍用機器人技術系統,根據俄軍相關發展規劃,2025年前俄軍武器庫中機器人的比例將達到約30%。隨著現代戰爭日益呈現出從信息化向智能化演進的大趨勢,軍用機器人的應用必將越來越廣泛。自20世紀60年代以來,機器人先后經歷了三代演進:從“遙控操作器”到“程序執行器“,再到智能機器人,在這一創新過程中,機器人操作系統的更新升級扮演了重要角色。ROS系統誕生于2007年的斯坦福大學,在全球開發者的共同支持下,現已包含2000多個機器人平臺的常用軟件包。據不完全統計,僅2017年5月全球就有70000多個獨立IP下載了900萬次ROS程序包,且ROS開發者社區中的1840位成員一共寫出了1000萬行代碼。
由此可見,機器人操作系統并不是一個陳舊不變的框架,而是處于不斷開發與完善過程之中。目前,全球致力于開發智能機器人產品的公司數不勝數,但從基底意義上關注機器人操作系統研究開發的卻是鳳毛麟角,我國目前主要有三大智能機器人操作系統:Turing OS 系統、用于小i機器人的操作系統iBotOS以及ROOBO人工智能機器人系統。以上機器人操作系統側重于機器人的系統性、決策力等不同面,由此可見智能機器人的開發并非像ROS系統那樣是“大一統”的局面。此外,機器人操作系統的完善不僅需要海量的硬件適配,也需要海量的開發者參與,這也是機器人開發創新的重點所在。總之,機器人操作系統的出現實現了從底層設備控制到高層數據管理的有效集成,對于軍用機器人的創新發展具有基礎性價值。
機器人操作系統是實現智能化作戰的技術支撐。伴隨著智能化武器裝備的發展與應用,未來戰爭的“智能化”氣息撲面而來,“鋼鐵戰士”不再只是科幻電影中的虛構形象,而日漸成為各國軍方關注的重點,當前機器人已被用于偵察、排雷、防化、保障及直接攻擊等各個領域。作為控制機器人的軟件體系,機器人操作系統是機器人之間相互理解并遵守規則的保證,也是多機器人及異構機器人之間協同行動的平臺,如同一根鏈條將機器人置于共同框架之下。
與計算機操作系統不同的是,機器人操作系統通過資源管理與行為管理相結合的架構,負責機器人觀察-判斷-決策-行動的全過程,機器人操作系統的完善是增強機器人的自主性、生存性與對抗性的關鍵所在,如2014年美國iRobot公司開發了一項用于提升機器人應急處置自主性的新操作系統,通過與Android程序相配套,軍用機器人具備了更強的自主思考能力。再比如針對異構多機器人的協同規劃與決策問題,德國人工智能研究中心(DFKI)在“分布式機器人系統集成式任務規劃”(IMPERA)中使用了標準化、模塊化的任務規劃架構,有效彌補了各個機器人分支在信息處理和問題求解方面的局限性,增強了機器人團體自主判斷及決策的合理性與準確性。在未來智能化戰爭時代,機器人將取代或協同部分人類參戰已成大勢所趨,而內嵌的機器人操作系統則直接規約著機器人的作戰模式,是競逐雙方需要搶占的技術高地。
三、智能導向深度融合
在機器人應用與發展過程中,機器人操作系統發揮了重要作用。與計算機操作系統的演進過程相類似,機器人操作系統也面臨著瓶頸與挑戰。以往的機器人操作系統主要解決了機器人的運動控制問題,未來則需要構建一個廣義的操作系統,在驅動本體的支持下,為加強機器人的語言、視覺、聽覺、行動等各方面的表現進行補充與升級,完善部件驅動、環境感知、行為管理、數據傳輸等功能,從而增強機器人可視控制、模擬仿真、數據傳輸和深度學習的能力。
編輯:hfy
-
機器人
+關注
關注
210文章
28205瀏覽量
206532 -
操作系統
+關注
關注
37文章
6738瀏覽量
123190 -
運動控制
+關注
關注
4文章
565瀏覽量
32825 -
ROS
+關注
關注
1文章
276瀏覽量
16967 -
深度學習
+關注
關注
73文章
5492瀏覽量
120977
發布評論請先 登錄
相關推薦
請問能分享ROS機器人操作系統的一些資料嗎?
微軟宣布Window10將正式引入機器人操作系統
機器人操作系統(ROS)是一種用于機器人開發的元操作系統
機器人操作系統ROS詳細介紹
主流機器人有哪些操作系統詳細資料大盤點

ROS機器人操作系統





 工商網監
工商網監
評論