 機器視覺的下一個階段可能就是機器學習
機器視覺的下一個階段可能就是機器學習
將機器視覺系統連接到物聯網可以創建強大的網絡功能。能夠從攝像機中識別出對象,可以使本地節點更加智能并具有更大的自治權,從而減少了中央服務器上的處理負荷,并可以實現更加分布式的控制體系結構。從而提供了更有效的操作,而所需的外部輸入少得多。
機器視覺在過去十年中取得了長足的進步。能夠檢測視頻幀內邊緣和移動的最新算法,以及與圖像傳感器,可編程邏輯,微控制器和圖形處理單元(GPU)相關的硅技術的進步,已幫助將其帶入了廣泛的嵌入式領域應用程序。可以下載到FPGA的更復雜的設計與新的開發環境(例如OpenCV)一起使用,以使嵌入式系統設計人員可以更輕松地訪問機器視覺。
機器視覺的這種不斷增長的擴散正在與將工業系統連接到物聯網(IoT)的趨勢融合。隨著傳感器變得越來越智能化(部分地由支持的計算機視覺算法驅動),因此生成的數據為工業系統的運行提供了寶貴的見解。反過來,這又開辟了監視設備的新方式,將自主機器人系統(如無人機)連接到物聯網基礎設施。
轉向機器視覺的部分原因是帶寬考慮,而另一個主要動機是使工業操作的更多部分自動化的前景。機器視覺的關鍵應用之一是檢查系統。在過去的十年中,帶有CMOS圖像傳感器的高性能相機系統的價格已大幅下降,從而可以在制造過程中更高分辨率地檢查電路板和系統。這些相機模塊與FPGA結合在一起,可以增加處理和決策的能力。這使攝像機可以對接收到的數據做出相應的響應,從而減少了通過網絡發送視頻的需求,并提高了整體操作效率。
將檢查設備的機器視覺元素連接到物聯網,可為正在對工廠性能進行分析的企業系統提供更多數據。機器視覺可以提供適合此類企業系統的抽象級別的信息,而不是原始數據。這顯著降低了服務器和整個網絡的帶寬開銷-企業系統正在處理來自物聯網的數百萬個數據點,因此服務器負載的任何減少都將有助于做出更及時的決策。
機器視覺攝取量的增加也為自動化工廠中的機器人制導系統打開了市場。因此,檢查機器可以基于從機器視覺系統獲得的結果,繞開中央企業服務器并直接與工廠中的其他設備進行通信。這樣可以提高效率,并再次減少網絡和服務器上的負載。機器視覺還被用于控制自動化設備,特別是在物料搬運中。這涵蓋了從自動機器人控制系統到工廠周圍物料轉移到倉庫中用于識別產品的自動揀選機的所有內容。
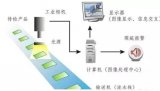
對于自主式物料搬運機器人,機器視覺就像在地板上確定一條線從一個位置到另一個位置一樣簡單。但是,它也可用于檢測途中的人員或障礙物,從而使工廠操作員和機器人可以安全高效地協同工作。如前所述,產品揀選現在也采用了機器視覺,通過條形碼識別物品,然后對齊機械手以捕獲特定物品并將其放入籃子。攝像機和隨之而來的本地處理都是必不可少的,并且作為廣泛的物聯網的一部分,拾取器/自主機器人也受到不斷監控。
隨著無人機越來越依賴于機器視覺,這種情況甚至擴展到了空中。事實證明,無人機是在難以到達的區域(例如,石油管道和天然氣設施)進行檢查的一種高效方法。除了允許無人機識別并接近特定目標區域外,以便可以對其進行更仔細地檢查之外,機器視覺還被用于防撞目的-通過將攝像頭系統連接至目標區域,避免固定障礙物甚至其他無人機。
然后是監視市場。越來越多地使用機器視覺在這里具有巨大的意義。無需每秒反饋百萬位的視頻數據供操作員查看,而是可以在本地處理視頻并觸發警報,而無需任何人工干預。在FPGA上運行的機器視覺算法越來越精確。結果,它們更好地區分了入侵者,動物或樹上的葉子(例如)的移動,從而使操作員可以同時支持更多數量的監視節點。此外,監控攝像機本身可以指示其他機器響應警報。自主地面和空中車輛(如無人機)的組合可能會改變監視的整個方式。成像系統不是安裝在固定的攝像機上,而是安裝在機載飛行器上,該機在飛行過程中會不斷監視該區域。這些無人機隨后在電池電量耗盡時返回充電基地,并派出其他無人機代替它們。這意味著可以提供恒定的監視范圍。更高級的機器視覺算法能夠識別潛在威脅,然后召集其他空中和地面飛船到該地區以進一步監視情況-所有這些都無需操作員參與。相同類型的情況同樣適用于農業應用,其中空運飛機上的機器視覺算法可以監視農作物的狀況,并在出現問題時將操作員(或自動拖拉機)引導至目標區域響應動作的形式。
此處概述的應用程序已通過底層硬件和軟件技術的進步而實現。機器視覺算法的結構越來越復雜,可以將它們下載到最新的FPGA和GPU。這些設備一次可以處理8或16個通道,支持每秒60幀的速率。它們還可以與OpenCV等高級軟件結合使用。
最初,OpenCV最初主要專注于研究和原型制作,近年來已越來越多地用于從云到移動的各種平臺上的已部署產品中。最新版本OpenCV 3.1已發布。以前的版本3.0是一項重大改進,將OpenCV提升到現代C ++標準,并合并了對3D視覺和增強現實的擴展支持。新的3.1版本引入了針對重要功能的改進算法,例如校準,光流,圖像濾波,分割和特征檢測。
未來的可能性
在機器視覺之后,機器學習是顯而易見的下一階段。計算機視覺算法能夠提供對靜止圖像和視頻內容的確定性分析,但是機器學習正在應用其他神經網絡方法來“教”系統尋找什么。例如,最新版本的OpenCV現在支持用于機器學習的深度神經網絡。
FPGA和GPU性能的提高為機器學習開辟了新的機會。這依賴于訓練階段,在該階段中,神經網絡顯示了許多不同的圖像,這些圖像標記有感興趣的對象,通常由實驗室或云中的大型服務器系統處理。它產生一系列權重和偏差數據,然后將其應用于嵌入式設計中實現的同一網絡。這個“推理引擎”使用這些權重來評估它正在查看的新數據是否包含那些對象。例如,最新的監控攝像頭正在使用神經網絡機器學習算法來超越傳統功能(例如監視和記錄),并提供其他視頻分析功能(例如人群密度監視,立體視覺,面部識別,人員計數和行為分析)。然后可以將該本地處理交付到物聯網中,從而集成到云中更廣泛的分析軟件中。
編輯:hfy
-
傳感器
+關注
關注
2548文章
50709瀏覽量
752111 -
物聯網
+關注
關注
2904文章
44296瀏覽量
371405 -
機器視覺
+關注
關注
161文章
4347瀏覽量
120125 -
可編程邏輯
+關注
關注
7文章
514瀏覽量
44072 -
無人機
+關注
關注
228文章
10353瀏覽量
179681
發布評論請先 登錄
相關推薦
適用于機器視覺應用的智能機器視覺控制平臺

【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
什么是機器視覺opencv?它有哪些優勢?
機器視覺的應用實例解析
深度學習在工業機器視覺檢測中的應用
分析 丨AI算法愈加復雜,但是機器視覺的開發門檻在降低
機器視覺軟件有哪些 機器視覺軟件的優點
技術科普 | 機器視覺5大關鍵技術及其常見應用







 工商網監
工商網監
評論