 基于UGN3503霍爾器件的數字指南針設計案例
基于UGN3503霍爾器件的數字指南針設計案例
本文介紹了用兩個UGN3503型霍爾器件設計制作的數字指南針的設計目的、系統結構和工作原理,以及各主要器件的使用方法。本系統包括UGN3503型霍爾器件、TLC0832 A/D轉換器、單片機控制、液晶顯示四部分,實現了對地磁信息的采集、放大,經過模數轉換和單片機處理,最終顯示出用文字表示的當前所處方位。
現在機器人的控制有了很大的發展,尤其遙控機器人,但是還不能象人有自己的探索。基本上是放上攝像頭人工控制,所以很大程度上沒有獨立工作能力,離開人和GPS還是不能工作。我們開發本系統是為了在一個惡劣的環境下為一個數字化系統提供一個原始的參考數據,或充當機器人的一個廉價的測控工具。
本著這個目的,本系統主要功能有:
1、地磁放大功能:通過內置磁鐵對地磁場的反應,實現對地磁信息的放大。
2、系統輔助定位功能:通過本設備提供的串行口,既可以嵌入系統,為系統的空間定位提供參考數據;又可以作為外設,提供臨時性測算。
本系統的輸出方式可以采用液晶顯示和語音輸出兩種方式,語音輸出可為盲人提供方便。
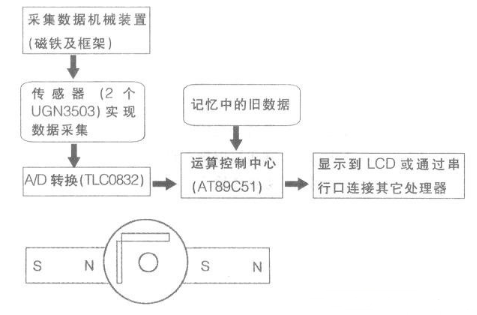
整個系統的方框圖如上圖所示。
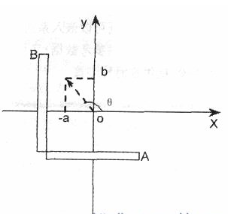
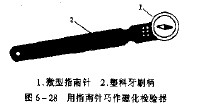
我們將互相垂直的兩個霍爾器件固定于框架底部(如下圖所示),在兩個小磁鐵條的N極和S極之間夾一個中空的塑料圓筒使其剛好將兩霍爾器件套入而沒有接觸。圓筒頂部封口,從其頂部圓心處引一根塑料軸,固定于框架底部,使圓筒可繞中心軸自由轉動。
通過這種方法,小磁條便可在地球磁場的作用下指示方向,由于此兩磁鐵之間的磁場強度比地球磁場強很多,因此霍爾器件能夠探測到其周圍磁場的變化,從而實現了對地磁信號的放大。
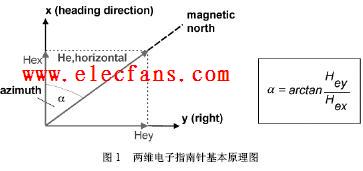
如圖所示霍爾器件A探測x方向的磁場,B探測y方向的磁場。設某一時刻磁場方向如右圖所示,A、B探測到的磁場分別為-a和b。則單片機通過處理此二數據便可得到方位角θ的值,從而判定當前方位。右圖中虛線箭頭所指方向為磁場方向,即地磁南極方向,×軸正方向即為觀察者面對的方向。
目前市面上有多種霍爾器件,但大多數靈敏度較低,考慮到地磁的磁感應強度較為微弱,我們慎重選用了UGN3503型霍爾器件。此霍爾器件靈敏度較高,而且低噪輸出。由于此器件采集到的信息是連續變化的模擬量,不能被單片機直接處理,必須把這些模擬量轉換成數字量后才能夠輸入到單片機中進行處理,因此我們選用了A/D轉換器TLC 0832。TLC0832是串行通訊的8腳2路A/D轉換器件,在功能上和體積上都有優勢。我們還可以把51改成2051進一步縮小體積。而且串行通訊可以把它跟3503做到一起,這樣數據傳輸不受距離限制。此轉換器與處理器接口兼容性較好,同時又可以單機操作。在5V電壓供應下,可以輸入0~5V范圍內電壓。TLC0831有單一輸入頻道;TLC0832已經具有多重輸入頻道。連續的輸出被配置到接口標準變化寄存器或微處理器。LCD液晶顯示采用LCD1602。此液晶顯示模塊為2行輸出,每行16個字符。
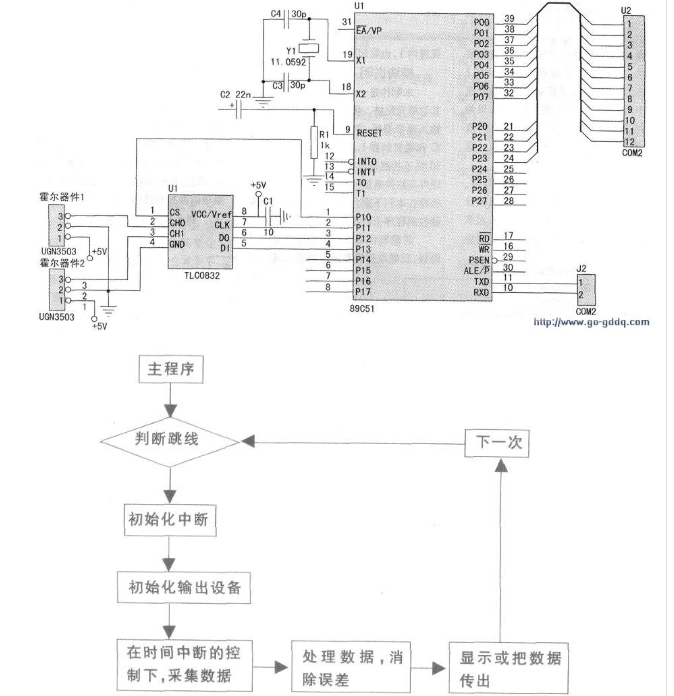
整個系統電路圖如上圖所示。
考慮到在實際應用時,磁場可能會由于外界抖動而在某一時間或某一位置產生不穩定的狀況,我們在數據處理時,采取了在若干個數據間段點中取其平緩過渡數據的設計方法。單片機最后通過跳線選擇處理結果輸出方式。系統程序流程圖如下圖所示。
目前,大多數設備還不具備簡單的方向識別功能。對于較復雜、較高檔的設備,其所用定位設備專用性較強,一般不易于其它設備兼容,且設計結構較為復雜,費用較高。我們設計的小型方向定位器,可以滿足一些小型的,對方向精度要求不高的設備需要。由于該設備開發成本較低,因此把該儀器應用于一些簡單設備中后,可以在較小提高成本的條件下,為設備增加一項較為顯著的功能,提高其性價比。
編輯:hfy
-
定位器
+關注
關注
2文章
164瀏覽量
17453 -
數字化系統
+關注
關注
0文章
12瀏覽量
6639 -
遙控機器人
+關注
關注
0文章
17瀏覽量
9226 -
霍爾器件
+關注
關注
1文章
21瀏覽量
6839
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論