") 汽車電子高分辨率雷達合適雷達MCU的匹配方案
汽車電子高分辨率雷達合適雷達MCU的匹配方案
恩智浦的 MCU 產(chǎn)品在性能和功耗之間達到了良好平衡,可用于硬件加速的高分辨率雷達系統(tǒng),打造更安全、更智能的汽車。
俗話說“汽車賣的就是安全性”,現(xiàn)在這句話比任何時候都更加正確。在全球新車評價規(guī)范(NCAP)的引領(lǐng)下,行業(yè)對汽車安全的監(jiān)管不斷加強,旨在盡可能降低駕駛員和乘客的安全風險,提高消費者對先進高科技安全功能的意識。在從當前一代的 L2 級別汽車演進到全自動化的 L5 級別汽車的過程中,安全問題成為消費者和汽車 OEM 最關(guān)注的頭等大事, 汽車安全系統(tǒng)的誤差容限變得越來越小。
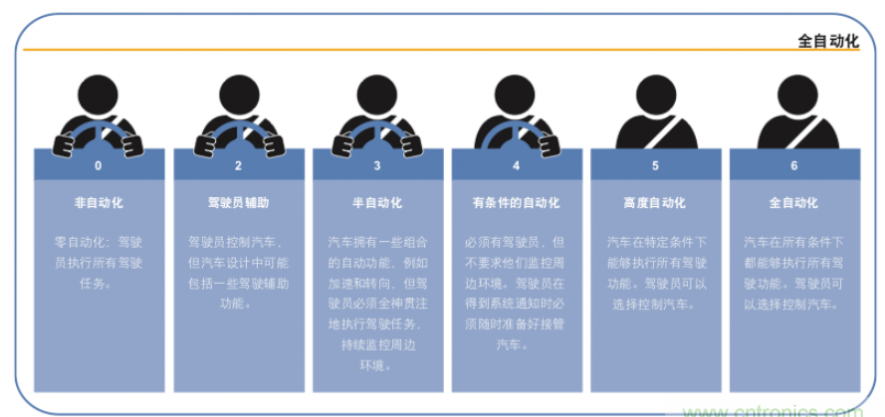
圖 1,汽車工程師學會(SAE)自動化級別
(資料來源:美國國家高速交通安全管理局(NHTSA))
汽車 OEM 和一級供應(yīng)商正在努力滿足這些不斷提高的要求,同時推動安全功能成本的下降,以達到消費者樂于接受的價位,增強各自的競爭優(yōu)勢,同時加快整體的市場接受度。在汽車傳感器級別上,必須充分考慮攝像頭、雷達、激光雷達技術(shù)的相對優(yōu)勢和劣勢,謹慎的在它們之間達到性價比平衡。
這三種技術(shù)都展示了它們對汽車安全應(yīng)用的獨特價值,但其中沒有任何一種技術(shù)能夠獨自全面地實現(xiàn)自動駕駛或高級駕駛輔助系統(tǒng)(ADAS)功能。但是如果涉及到成本,那么激光雷達傳感器的成本仍然是非常高昂的,只有在 L4 和 L5 級別的汽車上,這種技術(shù)對于履行必要法律責任和達到最低保險條件才變得不可或缺。除了降低車載激光和光學系統(tǒng)的成本之 外,機械旋轉(zhuǎn)式的 LiDAR 系統(tǒng)還需要不斷演進,消除因移動組件導致的可靠性難題。
在可以預(yù)見到的未來,雷達和攝像頭傳感器將是汽車安全應(yīng)用的理想組合,其具有經(jīng)濟性、可靠性和組合功能,幫助打造更安全、更智能的下一代汽車。雖然攝像頭傳感器對于目標識別和分類至關(guān)重要,但其缺陷是低光照和惡劣天氣會限制它們的效率,而雷達傳感器不會受到這些因素的影響,可以提供高精度的汽車周圍物體的相對距離和速度信息,這是攝像頭傳感器所無法做到的。
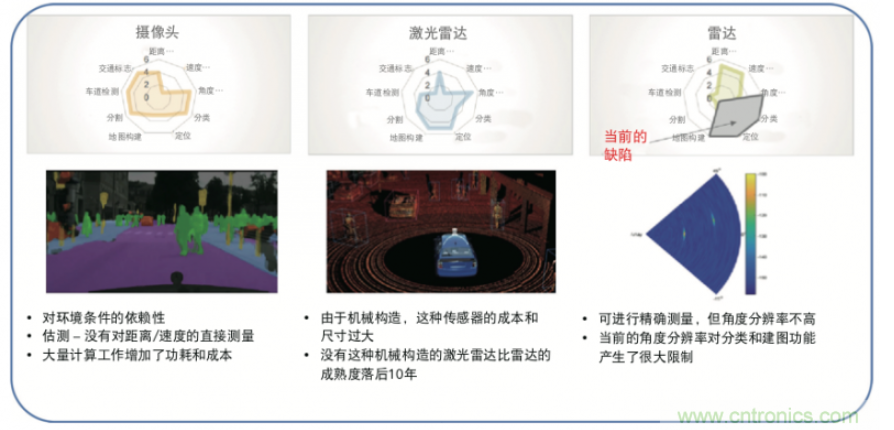
圖 2,當今自動駕駛系統(tǒng)的傳感器功能
攝像頭和雷達傳感器在處理器層面有一點類似之處:它們都會產(chǎn)生很大的計算工作負載。隨著像素大小縮減,像素密度增加,攝像頭的圖像分辨率可以不斷提高。但是,要提高雷達傳感器的分辨率,對底層處理平臺的需求將呈現(xiàn)指數(shù)級增長。
在本文中,我們將評估一些推動汽車產(chǎn)業(yè)持續(xù)創(chuàng)新的技術(shù)趨勢、挑戰(zhàn)和機遇,以及高級汽車安全功能對高分辨率雷達日益增加的依賴性。

圖 3,雷達場景
高分辨率雷達的高速處理
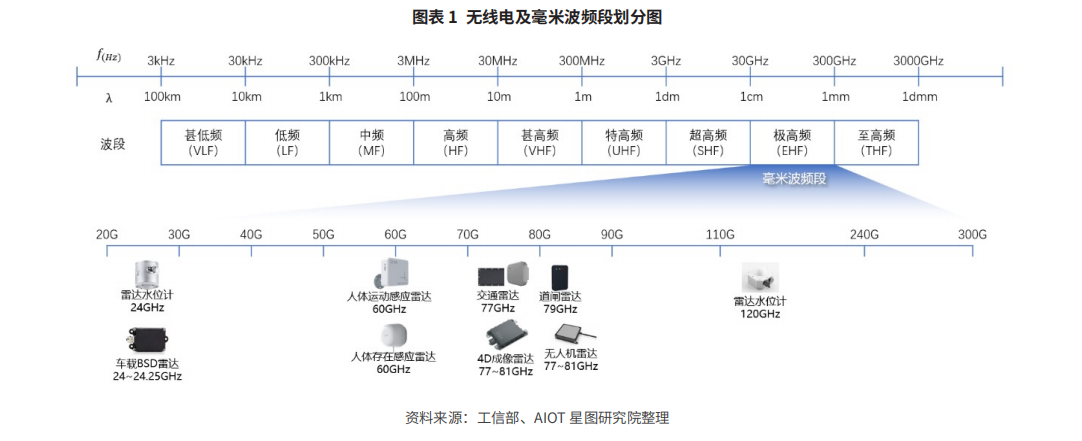
隨著 24 GHz 頻段變得越來越擁擠,監(jiān)管機構(gòu)在逐步淘汰用于該頻段的汽車雷達,同時開放了毫米波(mmW) 77GH 頻段 (76-81GHz)以供汽車雷達使用,充分發(fā)揮調(diào)頻連續(xù)波(FMCW)雷達的作用。這對于可用頻率的擴展實現(xiàn)了多達 5GHz 的掃頻帶寬,而以前的 24GHz 窄帶雷達的帶寬僅限 200MHz,兩者在可用頻率帶寬上存在很大差異。
這一變化使得距離分辨率提高了 25 倍,距離分辨率決定了物體之間相隔多遠才能被辨別為不同的目標,在有緊密聚集的鄰近目標的環(huán)境下,可以實現(xiàn)更好的檢測和跟蹤功能。要基于已知運動模式和兩個“目標”類別的屬性來實現(xiàn)更高階的自動決策,能夠辨別多個目標(例如汽車和行人)的能力顯得至關(guān)重要。
汽車雷達是經(jīng)過整體優(yōu)化來計算距離、速度 / 多普勒效應(yīng)、水平波達角和俯仰角等參數(shù)。如果底層處理平臺性能和 / 或存儲器受到限制,為了讓雷達以更高的分辨率來測量其中某個參數(shù),那就需要在其他參數(shù)方面做出犧牲。
雷達功能
測量
與被測目標的距離
相對徑向速度
水平波達角
雷達截面積(被測目標尺寸)
圖 4,雷達功能
汽車供應(yīng)商堅定不移地致力于提高雷達分辨率。但是,在多個參數(shù)之間進行權(quán)衡仍然是一個嚴峻挑戰(zhàn),特別是在角度分辨率方面,它是辨別相鄰車道汽車的一項關(guān)鍵指標,也是自適應(yīng)巡航控制(ACC)和自動緊急制動(AEB)應(yīng)用中不可或缺的功能。要能夠在大型目標周圍檢測和分辨出鄰近的行人,這會對傳感器的水平分辨率有很高的要求。
此外,高分辨雷達能夠精確地測量隧道、橋梁和標志桿,以及給汽車留出相應(yīng)的凈空余地,同時這種能力也可以用于檢測道路上的小型障礙物。這種新功能對俯仰角檢測的分辨率提出了更嚴格的要求,需要具有真正 2D 角度測量功能(水平方向角和俯仰角)的傳感器。
制造商可以利用多入多出(MIMO)技術(shù)實現(xiàn)這個目標。在這種技術(shù)中,N 個物理發(fā)射天線和 M 個物理接收天線形成 N x M 虛擬接收天線陣。這種方法的優(yōu)勢是不會給系統(tǒng)增加過多的額外成本,但在角度分辨率方面實現(xiàn)了顯著改進,同時盡可能地減少發(fā)射雷達的啁啾序列的數(shù)量。由于啁啾序列減少,就可以加快掃描速度,消除一些影響傳感器延遲的劣化效應(yīng),從而增強目標檢測敏捷性,縮短 ADAS 響應(yīng)時間。
另外還存在“距離走動”效應(yīng),在這種效應(yīng)中,運行中的目標在啁啾序列中會跨越距離分辨單元,從而導致模糊的多普勒測量,降低檢測和跟蹤精確度。通過產(chǎn)生更快的啁啾頻率,可以抑制這些效應(yīng),但提高啁啾頻率需要更快的采樣率,目的是保持最大 FFT 探測距離。更高的采樣率會加大底層處理器的存儲帶寬的壓力,并需要更快的多普勒 FFT 處理能力,從而對板載存儲器容量產(chǎn)生了很大需求,另外還有其他一些不利因素。
虛擬天線陣列的 MIMO 波束成形對處理器性能提出了要求,從根本上需要高性能的處理平臺,擁有充足的存儲器、帶寬和信號處理能力,這樣才能實現(xiàn)上文所述的角度分辯率的提升。
雷達具有兩個主要功能模塊
射頻傳感器(射頻“前端”)
天線
信號產(chǎn)生和發(fā)射
信號接收和信號調(diào)節(jié)
模數(shù)采樣
計算(雷達 MCU)
將采樣信號轉(zhuǎn)換為頻率信息
識別“目標”
計算 1)距離,2)相對徑向速度,3)目標角度
高級功能,例如分類和跟蹤
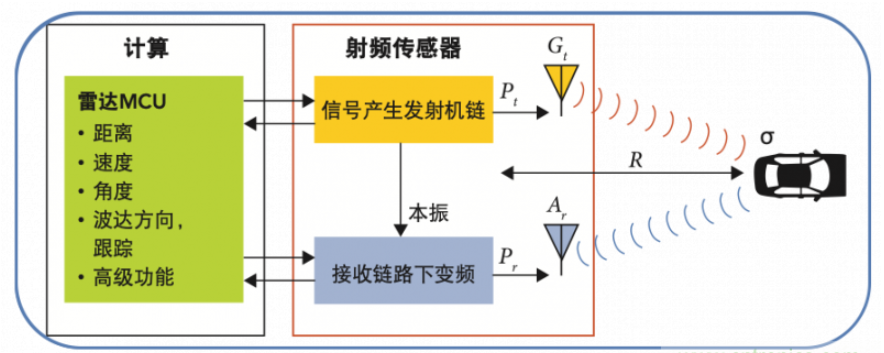
圖 5,雷達的功能模塊
雷達傳感器信號鏈引入的所有新自動決策功能都會增加計算工作負載。隨著汽車制造商部署功能更強大的雷達傳感器系統(tǒng),以滿足日趨嚴格的全球安全標準,對算力的需求只會一路增加。例如,全球 NCAP 標準預(yù)期將在 2020 年制定和實施 針對高級雷達驅(qū)動功能的嚴格安全等級要求。這些安全要求涉及到眾多功能,從十字路口自動緊急制動,遮擋物分類, 到低光照條件下的行人檢測等等。
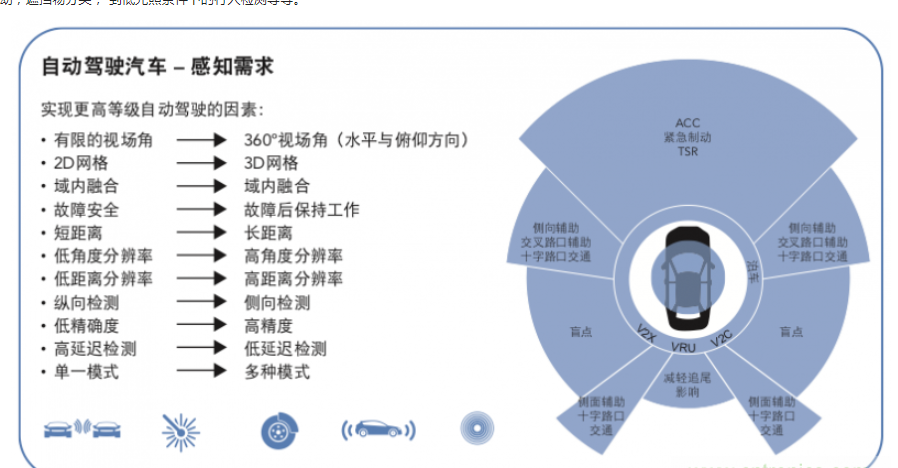
圖 6,自動駕駛汽車感知需求
在處理層,對基于雷達的主動安全功能倚重日益增加,這就使得當今汽車雷達處理器的性能成為關(guān)注的焦點。對汽車雷達處理器性能的關(guān)注,揭示了不同競爭產(chǎn)品之間的關(guān)鍵架構(gòu)差異。OEM 和一級供應(yīng)商必須認識到這些差異,從而確保盡可能高效地利用所有可用的雷達處理能力,增強 ADAS 響應(yīng),最大程度上保護駕駛員和乘客的安全。
出眾的性能和卓越的性能功耗比
對于每種汽車傳感器應(yīng)用而言,性能功耗比都是一個至關(guān)重要的考慮因素。無論是燃油動力,新能源,還是混動考慮到雷達相關(guān)的 RF 功率輸出,受限的安裝位置,散熱出口,對于一個使用多個雷達發(fā)射器的車輛來說,熱管理的限制是十分明顯的。隨著車載傳感器網(wǎng)絡(luò)的密度日益增加,系統(tǒng)設(shè)計師可用的氣流冷卻口減少,散熱和熱管理因素讓實現(xiàn)高性能功耗比變得更為嚴峻。
因此,在傳感器以內(nèi),僅通過簡單地增加高功耗通用處理器內(nèi)核數(shù)量,來滿足日益增加的雷達性能要求,并非明智的做法。雷達傳感器處理流要求開發(fā)者對每瓦特性能指標,高性能功耗比,給予高度關(guān)注,而正是在這個領(lǐng)域,恩智浦在業(yè)內(nèi)樹立了明顯優(yōu)勢。
作為車載毫米波雷達領(lǐng)域的技術(shù)和市場領(lǐng)導者,恩智浦的高度集成式雷達處理器能為客戶提供可擴展的硬件和軟件兼容產(chǎn)品系列,如 S32R27 和 S32R37 雷達 MCU。這些器件集成了高效的專用硬件加速器,即恩智浦專有的雷達信號處理加速器(SPT),與傳統(tǒng) DSP(依據(jù)恩智浦基準測試和公開發(fā)布的競爭產(chǎn)品信息)相比,每瓦特性能得到了顯著改進。另外,恩智浦雷達產(chǎn)品支持更遠的探測距離,更高的距離和角度分辨率和精度,這將顯著提升基于雷達的主動安全應(yīng)用的性能,如防撞、變道輔助、自動緊急制動等。
恩智浦的 S32R27 和 S32R37 是基于 Power Architecture 的 32 位 MCU,其設(shè)計目的是通過提供獨特的信號處理加速,結(jié)合性能強大的多核架構(gòu),實現(xiàn)先進的雷達信號處理功能,滿足新型波束成形和快速調(diào)頻調(diào)制雷達系統(tǒng)的高性能計算要求。
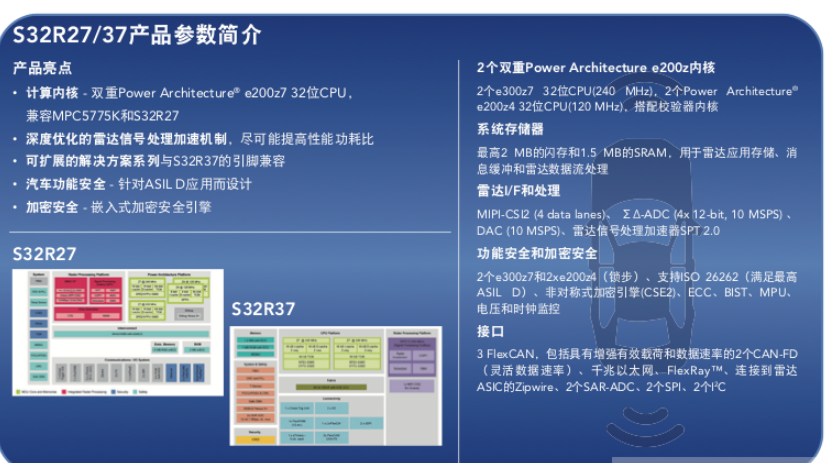
圖 7,恩智浦雷達器件的產(chǎn)品參數(shù)簡介
恩智浦汽車雷達 MCU 目標應(yīng)用
恩智浦 S32R27 和 S32R37——中 - 短距雷達,包括側(cè)視和車身環(huán)繞感知、變道 / 車道保持輔助(LCA、LKA)、盲點檢測(BSD)、后方交通穿行提示(RTCA)。
恩智浦 S32R27 的其他功能——長距雷達,包括前向防撞預(yù)警、自適應(yīng)巡航控制(ACC)、自動緊急制動(AEB)、行人保護。
恩智浦的 SPT 支持高性能雷達信號處理,采用性能強大的專用引擎,集成了信號處理功能,提供各種必需的硬件模塊, 可為工程師提供幫助,具有以下特性:
硬件加速,用于快速傅立葉變換(FFT)、直方圖統(tǒng)計、2D 峰值搜索、矢量運算
用于信號處理操作的高級別命令
用于 DMA 數(shù)據(jù)傳輸?shù)臄?shù)據(jù)壓縮 / 解壓
SPT 是高度優(yōu)化的雷達處理子系統(tǒng)的一部分,采用先進的高性能主機總線和外設(shè)總線。系統(tǒng)總線主接口用于 SRAM 和 ORAM 之間的快速數(shù)據(jù)傳輸,而外設(shè)接口的用途則是設(shè)置配置、獲取狀態(tài)信息、SPT 基本控制、觸發(fā)中斷,提供出色的汽車雷達處理性能。SPT 可編程直接存儲器訪問(PDMA)是支持數(shù)據(jù)流傳入和傳出 SPT 內(nèi)核的關(guān)鍵要素。恩智浦非常重視汽車雷達應(yīng)用領(lǐng)域,依托自身對系統(tǒng)的深入理解,為必要的方面進行優(yōu)化,同時為客戶提供足夠的靈活性。
未來愿景
保障駕駛員、乘客和行人安全的措施事關(guān)重大,每一毫秒的汽車響應(yīng)時間都極為關(guān)鍵。市場對更高分辨率雷達傳感器的需求日益增加,需要利用它們來實現(xiàn)先進的汽車安全功能,由于性能要求,底層處理平臺必須在計算敏捷性和能效之間達到良好平衡。
恩智浦推出了全面的汽車雷達 MCU 產(chǎn)品組合,結(jié)合業(yè)界領(lǐng)先的 SPT 硬件加速功能,構(gòu)建了可擴展、簡化、高度集成的獨特解決方案,專為提高雷達分辨率和增強傳感器數(shù)據(jù)融合而設(shè)計,幫助打造下一代更安全、更智能的汽車。恩智浦將繼續(xù)銳意創(chuàng)新,開發(fā)專門的專利技術(shù),跟上不斷發(fā)展的 L3 以上級別要求,讓一級供應(yīng)商能夠構(gòu)建性能出眾的雷達解決方案。
編輯:hfy
-
汽車傳感器
+關(guān)注
關(guān)注
3文章
188瀏覽量
20729 -
adas
+關(guān)注
關(guān)注
309文章
2168瀏覽量
208523 -
雷達傳感器
+關(guān)注
關(guān)注
3文章
286瀏覽量
34448
發(fā)布評論請先 登錄
相關(guān)推薦
使用DM642 DSP和THS8200驅(qū)動器的高分辨率視頻

物聯(lián)網(wǎng)中的高分辨率精確距離測量方案_毫米波雷達
利用高分辨率捕獲(HRCAP)進行單線數(shù)據(jù)傳輸
高分辨率音頻和傳統(tǒng)音頻區(qū)別
什么是高分辨率示波器?它有哪些優(yōu)勢?
Moritex 5X 高分辨率遠心鏡頭 助力晶圓檢測

ADS1283高分辨率模數(shù)轉(zhuǎn)換器數(shù)據(jù)表
機載單光子激光雷達系統(tǒng)用于實現(xiàn)高分辨率3D成像

高管洞察:高分辨率音樂需要高分辨率揚聲器

高分辨率音頻和普通音頻之間的區(qū)別

高分辨率分流放大器AD8219應(yīng)用筆記





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論