") 什么是RTK?GPS與RTK有什么區(qū)別
什么是RTK?GPS與RTK有什么區(qū)別
一、什么是RTK
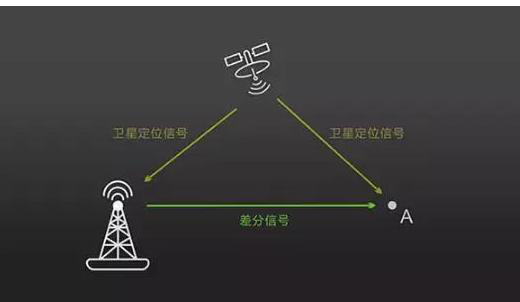
實(shí)時(shí)動態(tài)差分法(Real-time kinematic,RTK)又稱為載波相位差分技術(shù)。這是一種新的常用的GPS測量方法。以前的靜態(tài)、快速靜態(tài)、動態(tài)測量都需要事后進(jìn)行解算才能獲得厘米級的精度,而RTK是能夠在野外實(shí)時(shí)得到厘米級定位精度的測量方法,它能實(shí)時(shí)提供觀測點(diǎn)的三維坐標(biāo),并達(dá)到厘米級的高精度。與偽距差分原理相同,由基準(zhǔn)站通過數(shù)據(jù)鏈實(shí)時(shí)將其載波觀測量及站坐標(biāo)信息一同傳送給用戶站。用戶站接收GPS衛(wèi)星的載波相位 與來自基準(zhǔn)站的載波相位,并組成相位差分觀測值進(jìn)行實(shí)時(shí)處理,能實(shí)時(shí)給出厘米級的定位結(jié)果。實(shí)現(xiàn)載波相位差分GPS的方法分為兩類:修正法和差分法。前者與偽距差分相同,基準(zhǔn)站將載波相位修正量發(fā)送給用戶站,以改正其載波相位,然后求解坐標(biāo)。后者將基準(zhǔn)站采集的載波相位發(fā)送給用戶臺進(jìn)行求差解算坐標(biāo)。前者為準(zhǔn)RTK技術(shù),后者為真正的RTK技術(shù)。
二、GPS與RTK
RTK技術(shù)是建立在實(shí)時(shí)處理上述基準(zhǔn)站與用戶站的載波相位基礎(chǔ)上的,采用了載波相位動態(tài)實(shí)時(shí)差分方法,是GPS應(yīng)用的重大里程碑,它的出現(xiàn)為工程放樣、地形測圖,各種控制測量帶來了新曙光,極大地提高了外業(yè)作業(yè)效率。
常規(guī)的GPS測量方法,如靜態(tài)、快速靜態(tài)、動態(tài)測量都需要事后進(jìn)行解算才能獲得厘米級的精度,而RTK是能夠在野外實(shí)時(shí)得到厘米級定位精度的測量方法,它采用了載波相位動態(tài)實(shí)時(shí)差分(Real - time kinematic)方法,是GPS應(yīng)用的重大里程碑,它的出現(xiàn)為工程放樣、地形測圖,各種控制測量帶來了新曙光,極大地提高了外業(yè)作業(yè)效率。
高精度的GPS測量必須采用載波相位觀測值,RTK定位技術(shù)就是基于載波相位觀測值的實(shí)時(shí)動態(tài)定位技術(shù),它能夠?qū)崟r(shí)地提供測站點(diǎn)在指定坐標(biāo)系中的三維定位結(jié)果,并達(dá)到厘米級精度。在RTK作業(yè)模式下,基準(zhǔn)站通過數(shù)據(jù)鏈將其觀測值和測站坐標(biāo)信息一起傳送給流動站。流動站不僅通過數(shù)據(jù)鏈接收來自基準(zhǔn)站的數(shù)據(jù),還要采集GPS觀測數(shù)據(jù),并在系統(tǒng)內(nèi)組成差分觀測值進(jìn)行實(shí)時(shí)處理,同時(shí)給出厘米級定位結(jié)果,歷時(shí)不到一秒鐘。流動站可處于靜止?fàn)顟B(tài),也可處于運(yùn)動狀態(tài);可在固定點(diǎn)上先進(jìn)行初始化后再進(jìn)入動態(tài)作業(yè),也可在動態(tài)條件下直接開機(jī),并在動態(tài)環(huán)境下完成周模糊度的搜索求解。在整周末知數(shù)解固定后,即可進(jìn)行每個(gè)歷元的實(shí)時(shí)處理,只要能保持四顆以上衛(wèi)星相位觀測值的跟蹤和必要的幾何圖形,則流動站可隨時(shí)給出厘米級定位結(jié)果。
RTK技術(shù)的關(guān)鍵在于數(shù)據(jù)處理技術(shù)和數(shù)據(jù)傳輸技術(shù),RTK定位時(shí)要求基準(zhǔn)站接收機(jī)實(shí)時(shí)地把觀測數(shù)據(jù)(偽距觀測值,相位觀測值)及已知數(shù)據(jù)傳輸給流動站接收機(jī),數(shù)據(jù)量比較大,一般都要求9600的波特率,這在無線電上不難實(shí)現(xiàn)。
GPS接收機(jī)如何分類
GPS衛(wèi)星發(fā)送的導(dǎo)航定位信號,是一種可供無數(shù)用戶共享的信息資源。對于陸地、海洋和空間的廣大用戶,只要用戶擁有能夠接收、跟蹤、變換和測量GPS信號的接收設(shè)備,即GPS信號接收機(jī)。可以在任何時(shí)候用GPS信號進(jìn)行導(dǎo)航定位測量。根據(jù)使用目的的不同, 用戶要求的GPS信號接收機(jī)也各有差異。目前世界上已有幾十家工廠生產(chǎn)GPS接收機(jī), 產(chǎn)品也有幾百種。這些產(chǎn)品可以按照原理、用途、功能等來分類。
按接收機(jī)的用途分類
導(dǎo)航型接收機(jī)
此類型接收機(jī)主要用于運(yùn)動載體的導(dǎo)航,它可以實(shí)時(shí)給出載體的位置和速度。這類接收機(jī) 一般采用C/A碼偽距測量,單點(diǎn)實(shí)時(shí)定位精度較低,一般為±25mm,有SA影響時(shí)為±100mm。這類接收機(jī)價(jià)格便宜,應(yīng)用廣泛。根據(jù)應(yīng)用領(lǐng)域的不同,此類接收機(jī)還可以進(jìn)一步分為:車載型--用于車輛導(dǎo)航定位;航海型--用于船舶導(dǎo)航定位;航空型--用于飛機(jī)導(dǎo)航定位。由于飛機(jī)運(yùn)行速度快,因此,在航空上用的接收機(jī)要求能適應(yīng)高速運(yùn)動。星載型--用于衛(wèi)星的導(dǎo)航定位。由于衛(wèi)星的速度高達(dá) 7km/s以上,因此對接收機(jī)的要求更高。
測地型接收機(jī)
測地型接收機(jī)主要用于精密大地測量和精密工程測量。定位精度高。儀器結(jié)構(gòu)復(fù)雜,價(jià)格較貴。
授時(shí)型接收機(jī)
這類接收機(jī)主要利用GPS衛(wèi)星提供的高精度時(shí)間標(biāo)準(zhǔn)進(jìn)行授時(shí),常用于天文臺及無線電通訊中時(shí)間同步。
按接收機(jī)的載波頻率分類
單頻接收機(jī)
單頻接收機(jī)只能接收L1載波信號,測定載波相位觀測值進(jìn)行定位。由于不能有效消除 電離層延遲影響,單頻接收機(jī)只適用于短基線(<15km)的精密定位。雙頻接收機(jī) 雙頻接收機(jī)可以同時(shí)接收L1,L2載波信號。利用雙頻對電離層延遲的不一樣,可以消除電離層 對電磁波信號的延遲的影響,因此雙頻接收機(jī)可用于長達(dá)幾千公里的精密定位。
按接收機(jī)通道數(shù)分類
GPS接收機(jī)能同時(shí)接收多顆GPS衛(wèi)星的信號,為了分離接收到的不同衛(wèi)星的信號,以實(shí)現(xiàn)對衛(wèi)星信號的跟蹤、處理和量測,具有這樣功能的器件稱為天線信號通道。根據(jù)接收機(jī)所具有的通道種類可分為:多通道接收機(jī) 序貫通道接收機(jī) 多路多用通道接收機(jī) 按接收機(jī)工作原理分類
碼相關(guān)型接收機(jī)
碼相關(guān)型接收機(jī)是利用碼相關(guān)技術(shù)得到偽距觀測值。
平方型接收機(jī)
平方型接收機(jī)是利用載波信號的平方技術(shù)去掉調(diào)制信號,來恢復(fù)完整的載波信號 通過相位計(jì)測定接收機(jī)內(nèi)產(chǎn)生的載波信號與接收到的載波信號之間的相位差,測定偽距觀測值。
混合型接收機(jī)
這種儀器是綜合上述兩種接收機(jī)的優(yōu)點(diǎn),既可以得到碼相位偽距,也可以得到載波相位觀測值。
干涉型接收機(jī)
這種接收機(jī)是將GPS衛(wèi)星作為射電源,采用干涉測量方法,測定兩個(gè)測站間距離。
RTK技術(shù)如何應(yīng)用
1.各種控制測量 傳統(tǒng)的大地測量、工程控制測量采用三角網(wǎng)、導(dǎo)線網(wǎng)方法來施測,不僅費(fèi)工費(fèi)時(shí),要求點(diǎn)間通視,而且精度分布不均勻,且在外業(yè)不知精度如何,采用常規(guī)的GPS 靜態(tài)測量、快速靜態(tài)、偽動態(tài)方法,在外業(yè)測設(shè)過程中不能實(shí)時(shí)知道定位精度,如果測設(shè)完成后,回到內(nèi)業(yè)處理后發(fā)現(xiàn)精度不合要求,還必須返測,而采用RTK來進(jìn)行控制測量,能夠?qū)崟r(shí)知道定位精度,如果點(diǎn)位精度要求滿足了,用戶就可以停止觀測了,而且知道觀測質(zhì)量如何,這樣可以大大提高作業(yè)效率。如果把RTK用于公路控制測量、電子線路控制測量、水利工程控制測量、大地測量、則不僅可以大大減少人力強(qiáng)度、節(jié)省費(fèi)用,而且大大提高工作效率,測一個(gè)控制點(diǎn)在幾分鐘甚至于幾秒鐘內(nèi)就可完成。
2.地形測圖 過去測地形圖時(shí)一般首先要在測區(qū)建立圖根控制點(diǎn),然后在圖根控制點(diǎn)上架上全站儀或經(jīng)緯儀配合小平板測圖,現(xiàn)在發(fā)展到外業(yè)用全站儀和電子手簿配合地物編碼,利用大比例尺測圖軟件來進(jìn)行測圖,甚至于發(fā)展到最近的外業(yè)電子平板測圖等等,都要求在測站上測四周的地形地貌等碎部點(diǎn),這些碎部點(diǎn)都與測站通視,而且一般要求至少2-3人操作,需要在拼圖時(shí)一旦精度不合要求還得到外業(yè)去返測,現(xiàn)在采用RTK時(shí),僅需一人背著儀器在要測的地形地貌碎部點(diǎn)呆上一二秒種,并同時(shí)輸入特征編碼,通過手簿可以實(shí)時(shí)知道點(diǎn)位精度,把一個(gè)區(qū)域測完后回到室內(nèi),由專業(yè)的軟件接口就可以輸出所要求的地形圖,這樣用RTK僅需一人操作,不要求點(diǎn)間通視,大大提高了工作效率,采用RTK配合電子手簿可以測設(shè)各種地形圖,如普通測圖、鐵路線路帶狀地形圖的測設(shè),公路管線地形圖的測設(shè),配合測深儀可以用于測水庫地形圖,航 海海洋測圖等等。
3.放樣程放樣是測量一個(gè)應(yīng)用分支,它要求通過一定方法采用一定儀器把人為設(shè)計(jì)好的點(diǎn)位在實(shí)地給標(biāo)定出來,過去采用常規(guī)的放樣方法很多,如經(jīng)緯儀交會放樣,全站儀的邊角放樣等等,一般要放樣出一個(gè)設(shè)計(jì)點(diǎn)位時(shí),往往需要來回移動目標(biāo),而且要2-3人操作,同時(shí)在放樣過程中還要求點(diǎn)間通視情況良好,在生產(chǎn)應(yīng)用上效率不是很高,有時(shí)放樣中遇到困難的情況會借助于很多方法才能放樣,如果采用RTK技術(shù)放樣時(shí),僅需把設(shè)計(jì)好的點(diǎn)位坐標(biāo)輸入到電子手簿中,背著GPS接收機(jī),它會提醒你走到要放樣點(diǎn)的位置,既迅速又方便,由于GPS是通過坐標(biāo)來直接放樣的,而且精度很高也很均勻,因而在外業(yè)放樣中效率會大大提高,且只需一個(gè)人操作。
三、無人機(jī)中的RTK
最近幾年無人機(jī)市場可以說的上是非常火爆的,無人機(jī)公司也是數(shù)不勝數(shù)。無人機(jī)的應(yīng)用場合也是非常之多的,農(nóng)業(yè)、物流、安防、巡航、測繪、航拍等等都得到了非常好的應(yīng)用。同時(shí)無人機(jī)市場也催生了許多的配套設(shè)備的發(fā)展。RTK在工業(yè)無人機(jī)上的應(yīng)用就是一個(gè)很好的例子,他的精準(zhǔn)性可以說的上是相當(dāng)完美,在固定解狀態(tài)定位精度是可以達(dá)到厘米級的。在這里就不對RTK系統(tǒng)如何去工作來做解析了,我們這里主要講的是如何去應(yīng)用這個(gè)系統(tǒng)。
RTK的全名是叫載波相位差分,其應(yīng)用依賴于基站的差分信號。再在接收機(jī)上求差解算坐標(biāo)位置。這種解算出來的數(shù)據(jù)定位精度可以到達(dá)厘米級,當(dāng)然這個(gè)是相對基站的定位精度,因?yàn)榛精@取自身的坐標(biāo)屬于單點(diǎn)位置,而單點(diǎn)位置本身就存在誤差。
RTK一旦進(jìn)入到固定解在這里面是有很多的數(shù)據(jù)可以利用,不止是位置哦,還有高度也是可以用的。不過對RTK的數(shù)據(jù)的可靠性還是非常重要的,因?yàn)榛旧鲜忻嫔系腞TK系統(tǒng)對數(shù)據(jù)的可靠性都是99.99%,還有就是中間差分?jǐn)?shù)據(jù)鏈突然斷掉了,這些都是需要去考慮的。所以還是有比用利用RTK中的一些數(shù)據(jù)來進(jìn)行判別,比如固定解的標(biāo)志,位置方差等等,大家有興趣可以自己去發(fā)掘,這個(gè)也是需要很多實(shí)驗(yàn)才能夠得出的。
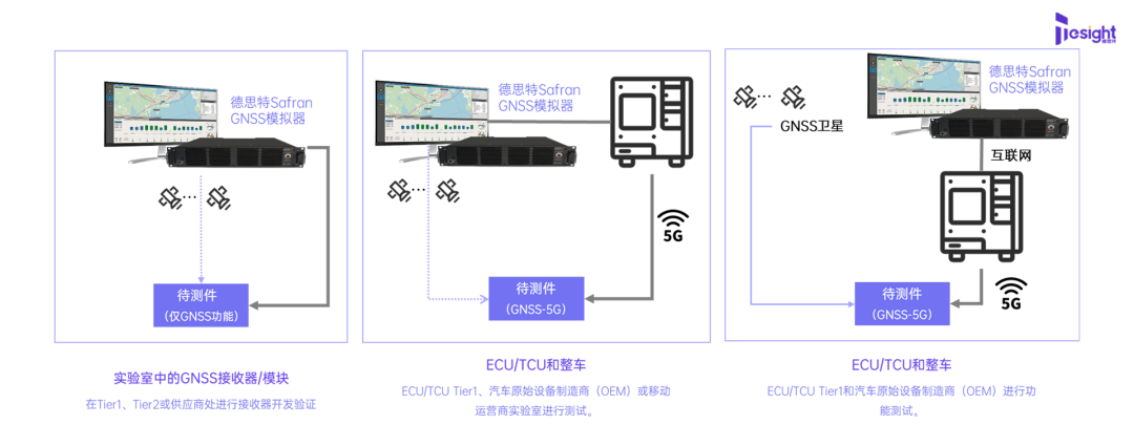
我這里就不對這些個(gè)方案進(jìn)行詳細(xì)去描述,我這里只貼出幾張圖片,具體的如何去應(yīng)用可以有很多的功能可以去開發(fā)的。這里我們貼出兩個(gè)參考方案,一個(gè)是基于普通無線的方式,這個(gè)主要是考慮移動性強(qiáng),設(shè)計(jì)簡單,缺點(diǎn)是基站無線覆蓋范圍小。還有一個(gè)是基于GSM網(wǎng)絡(luò)方案,這個(gè)方案應(yīng)用性強(qiáng),但是這個(gè)就類似于手機(jī)基站了,這個(gè)覆蓋范圍廣(但是這個(gè)也不能太廣了最好是<60km),缺點(diǎn)是維護(hù)成本高,開發(fā)周期長。
無線方案就比較簡單,一個(gè)基站+一個(gè)無線模塊就可以解決。
這個(gè)主要是把差分?jǐn)?shù)據(jù)通過網(wǎng)絡(luò)發(fā)送到服務(wù)器再分發(fā)到移動站終端,這個(gè)從長期的角度上來看是比較靠譜的,畢竟省了基站,而且這種差分?jǐn)?shù)據(jù)也是可以應(yīng)用在很多的場合的。這個(gè)就對很多無人機(jī)應(yīng)用的場合就提出了要求,就是需要好的網(wǎng)絡(luò)才能通信順暢,不過未來的發(fā)展全面覆蓋網(wǎng)絡(luò)應(yīng)該問題也不大。
RTK在無人機(jī)上的應(yīng)用在一定程度上是非常重要的,畢竟這個(gè)是在天上飛,一旦有差池就掉下來,那樣損失就大了。目前很多領(lǐng)域的無人機(jī)都要求精準(zhǔn)定位,比如農(nóng)業(yè)無人機(jī)就要求在噴灑的時(shí)候不漏噴、不重噴,那么這就需要RTK系統(tǒng)了,也有很多的無人機(jī)的電子羅盤很容易受到干擾,比如電力巡航就可以采用定位定向的RTK系統(tǒng)了。
審核編輯黃宇
-
gps
+關(guān)注
關(guān)注
22文章
2884瀏覽量
166038 -
定位
+關(guān)注
關(guān)注
5文章
1303瀏覽量
35339 -
測量
+關(guān)注
關(guān)注
10文章
4768瀏覽量
111132 -
無人機(jī)
+關(guān)注
關(guān)注
228文章
10340瀏覽量
179626 -
RTK
+關(guān)注
關(guān)注
8文章
127瀏覽量
37471
發(fā)布評論請先 登錄
相關(guān)推薦
巍泰技術(shù) UWB 信標(biāo)系統(tǒng)定位技術(shù)與 GPS/RTK/RFID/WiFi 等技術(shù)優(yōu)勢對比

工地UWB+北斗RTK人員定位系統(tǒng)方案的原理、特點(diǎn)、功能及應(yīng)用

GNSS RTK差分基準(zhǔn)站是什么?RTK差分基站應(yīng)用在哪些領(lǐng)域?

GPS/北斗RTK差分定位系統(tǒng)的技術(shù)原理以及應(yīng)用領(lǐng)域
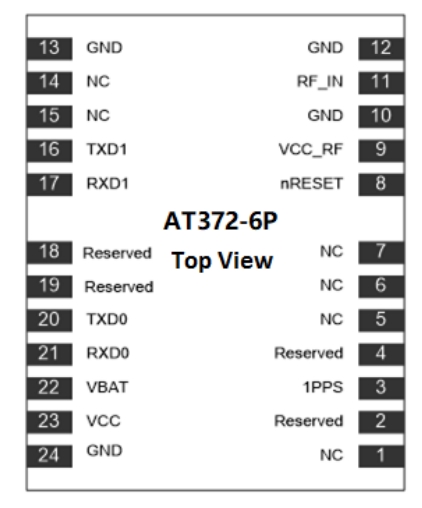
AT372-6P杭州中科微GNSS單頻RTK高精度定位模塊datasheet
北斗RTK高精度定位技術(shù)原理、技術(shù)優(yōu)勢及應(yīng)用領(lǐng)域

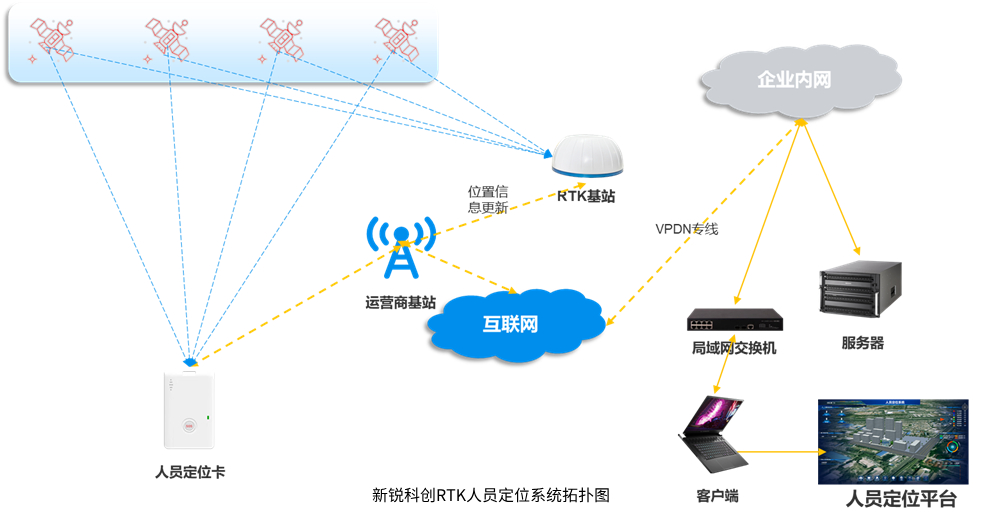
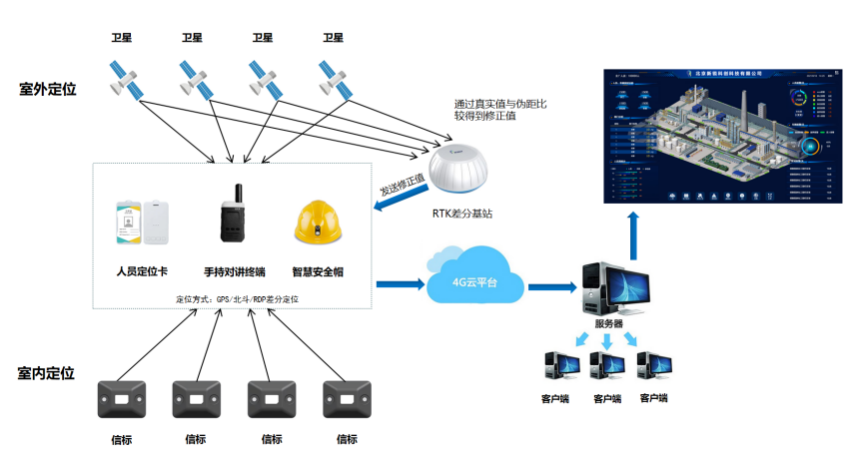
化工廠室外GPS 北斗RTK差分人員定位系統(tǒng)解決方案
北斗RTK高精度定位系統(tǒng)介紹
室外定位:高精度北斗RTK定位技術(shù)
5分鐘讀懂GPS-RTK實(shí)時(shí)動態(tài)技術(shù),建議收藏!
北斗RTK手持終端DMR對講+單北斗定位短報(bào)文功能

什么是RTK?RTK的原理是什么?RTK對于無人機(jī)來說有什么用?
RTK、PPP與RTK-PPP?一文帶您認(rèn)識高精定位及如何進(jìn)行高精定位GNSS測試!(二)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論