") 對比CAN總線和RS485總線
對比CAN總線和RS485總線
CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡稱,是由研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國BOSCH公司開發(fā)了的,并最終成為國際標(biāo)準(zhǔn)(ISO11898)。是國際上應(yīng)用最廣泛的現(xiàn)場總線之一。 在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計算機控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機械車輛設(shè)計的J1939協(xié)議。近年來,其所具有的高可靠性和良好的錯誤檢測能力受到重視,被廣泛應(yīng)用于汽車計算機控制系統(tǒng)和環(huán)境溫度惡劣、電磁輻射強和振動大的工業(yè)環(huán)境。
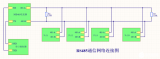
rs-485采用半雙工工作方式,支持多點數(shù)據(jù)通信。rs-485總線網(wǎng)絡(luò)拓?fù)湟话悴捎媒K端匹配的總線型結(jié)構(gòu)。即采用一條總線將各個節(jié)點串接起來,不支持環(huán)形或星型網(wǎng)絡(luò)。 rs-485采用平衡發(fā)送和差分接收,因此具有抑制共模干擾的能力。加上總線收發(fā)器具有高靈敏度,能檢測低至200mv的電壓,故傳輸信號能在千米以外得到恢復(fù)。 有些rs-485收發(fā)器修改輸入阻抗以便允許將多達(dá)8倍以上的節(jié)點數(shù)連接到相同總線。rs-485最常見的應(yīng)用是在工業(yè)環(huán)境下可編程邏輯控制器內(nèi)部之間的通信。
CAN總線和RS485總線應(yīng)用概述
以往,PC與智能設(shè)備通訊多借助RS232、RS485、以太網(wǎng)等方式,主要取決于設(shè)備的接口規(guī)范。但RS232、RS485只能代表通訊的物理介質(zhì)層和鏈路層,如果要實現(xiàn)數(shù)據(jù)的雙向訪問,就必須自己編寫通訊應(yīng)用程序,但這種程序多數(shù)都不能符合ISO/OSI的規(guī)范,只能實現(xiàn)較單一的功能,適用于單一設(shè)備類型,程序不具備通用性。
在RS232或RS485設(shè)備聯(lián)成的設(shè)備網(wǎng)中,如果設(shè)備數(shù)量超過2臺,就必須使用RS485做通訊介質(zhì),RS485網(wǎng)的設(shè)備間要想互通信息只有通過“主(Master)”設(shè)備中轉(zhuǎn)才能實現(xiàn),這個主設(shè)備通常是PC,而這種設(shè)備網(wǎng)中只允許存在一個主設(shè)備,其余全部是從(Slave)設(shè)備。而現(xiàn)場總線技術(shù)是以ISO/OSI模型為基礎(chǔ)的,具有完整的軟件支持系統(tǒng),能夠解決總線控制、沖突檢測、鏈路維護等問題。現(xiàn)場總線設(shè)備自動成網(wǎng),無主/從設(shè)備之分或允許多主存在。在同一個層次上不同廠家的產(chǎn)品可以互換,設(shè)備之間具有互操作性。
現(xiàn)在的總線格式很多,CAN相對于其他的總線有什么特點?首先,就比較一下大家耳熟能詳?shù)?85總線, 485總線只是一種電平標(biāo)準(zhǔn),并不是什么新的協(xié)議,與232差不多,當(dāng)然這么說不是很恰當(dāng),但是有助于大家理解。
CAN總線PK RS485總線
CAN(Controller Area Network)屬于現(xiàn)場總線的范疇,它是一種有效支持分布式控制或?qū)崟r控制的串行通信網(wǎng)絡(luò)。較之目前RS-485基于R線構(gòu)建的分布式控制系統(tǒng)而言,基于CAN總線的分布式控制系統(tǒng)在以下方面具有明顯的優(yōu)越性:
1)CAN控制器工作于多主方式,網(wǎng)絡(luò)中的各節(jié)點都可根據(jù)總線訪問優(yōu)先權(quán)(取決于報文標(biāo)識符)采用無損結(jié)構(gòu)的逐位仲裁方式競爭向總線發(fā)送數(shù)據(jù),且CAN協(xié)議廢除了站地址編碼,而代之以對通信數(shù)據(jù)進行編碼,這可使不同的節(jié)點同時接收到相同的數(shù)據(jù),這些特點使得CAN總線構(gòu)成的網(wǎng)絡(luò)各節(jié)點之間的數(shù)據(jù)通信實時性強,并且容易構(gòu)成冗余結(jié)構(gòu),提高系統(tǒng)的可靠性和系統(tǒng)的靈活性。而利用RS-485只能構(gòu)成主從式結(jié)構(gòu)系統(tǒng),通信方式也只能以主站輪詢的方式進行,系統(tǒng)的實時性、可靠性較差。
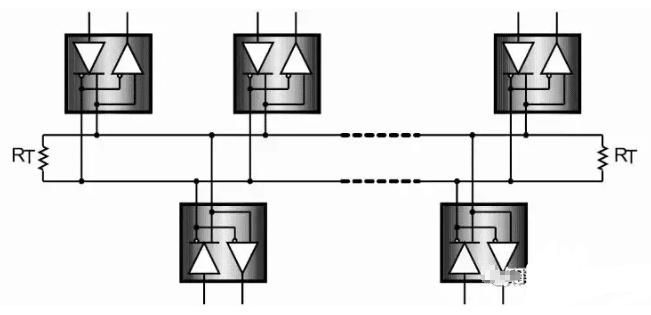
2)CAN總線通過CAN控制器接口芯片82C250的兩個輸出端CANH和CANL與物理總線相連,而CANH端的狀態(tài)只能是高電平或懸浮狀態(tài),CANL端只能是低電平或懸浮狀態(tài)。這就保證不會出現(xiàn)像在RS-485網(wǎng)絡(luò)中,當(dāng)系統(tǒng)有錯誤,出現(xiàn)多節(jié)點同時向總線發(fā)送數(shù)據(jù)時,導(dǎo)致總線呈現(xiàn)短路,從而損壞某些節(jié)點的現(xiàn)象。而且CAN節(jié)點在錯誤嚴(yán)重的情況下具有自動關(guān)閉輸出功能,以使總線上其他節(jié)點的操作不受影響,從而保證不會出現(xiàn)象在網(wǎng)絡(luò)中,因個別節(jié)點出現(xiàn)問題,使得總線處于“死鎖”狀態(tài)。
3)CAN具有完善的通信協(xié)議,可由CAN控制器芯片及其接口芯片來實現(xiàn),從而大大降低了系統(tǒng)的開發(fā)難度,縮短了開發(fā)周期,這些是只僅僅有電氣協(xié)議的RS-485所無法比擬的。
審核編輯黃宇
-
CAN
+關(guān)注
關(guān)注
57文章
2662瀏覽量
462427 -
通信
+關(guān)注
關(guān)注
18文章
5875瀏覽量
135304 -
總線
+關(guān)注
關(guān)注
10文章
2817瀏覽量
87696 -
汽車
+關(guān)注
關(guān)注
12文章
3267瀏覽量
36823
發(fā)布評論請先 登錄
相關(guān)推薦
如何解決RS485總線沖突和支線問題?

CAN總線驅(qū)動器代替RS485總線驅(qū)動器是否可行?
RS485通信協(xié)議詳解(硬件干貨)
為什么有的RS485總線兩端必須安裝有源終端電阻?
RS485和CAN總線電纜超過多長才需安裝終端電阻?
RS485集線器工作原理是什么?RS485集線器具有什么功能?
RS-485典型配網(wǎng)結(jié)構(gòu) RS485總線優(yōu)缺點
什么情況下在RS485總線上要增加終端電阻?
RS485總線在連接時為什么要屏蔽接地?
RS485總線連接采用什么樣的線纜呢?多臺RS485設(shè)備如何連接呢?
RS232、RS485和CAN究竟能傳輸多遠(yuǎn)距離?
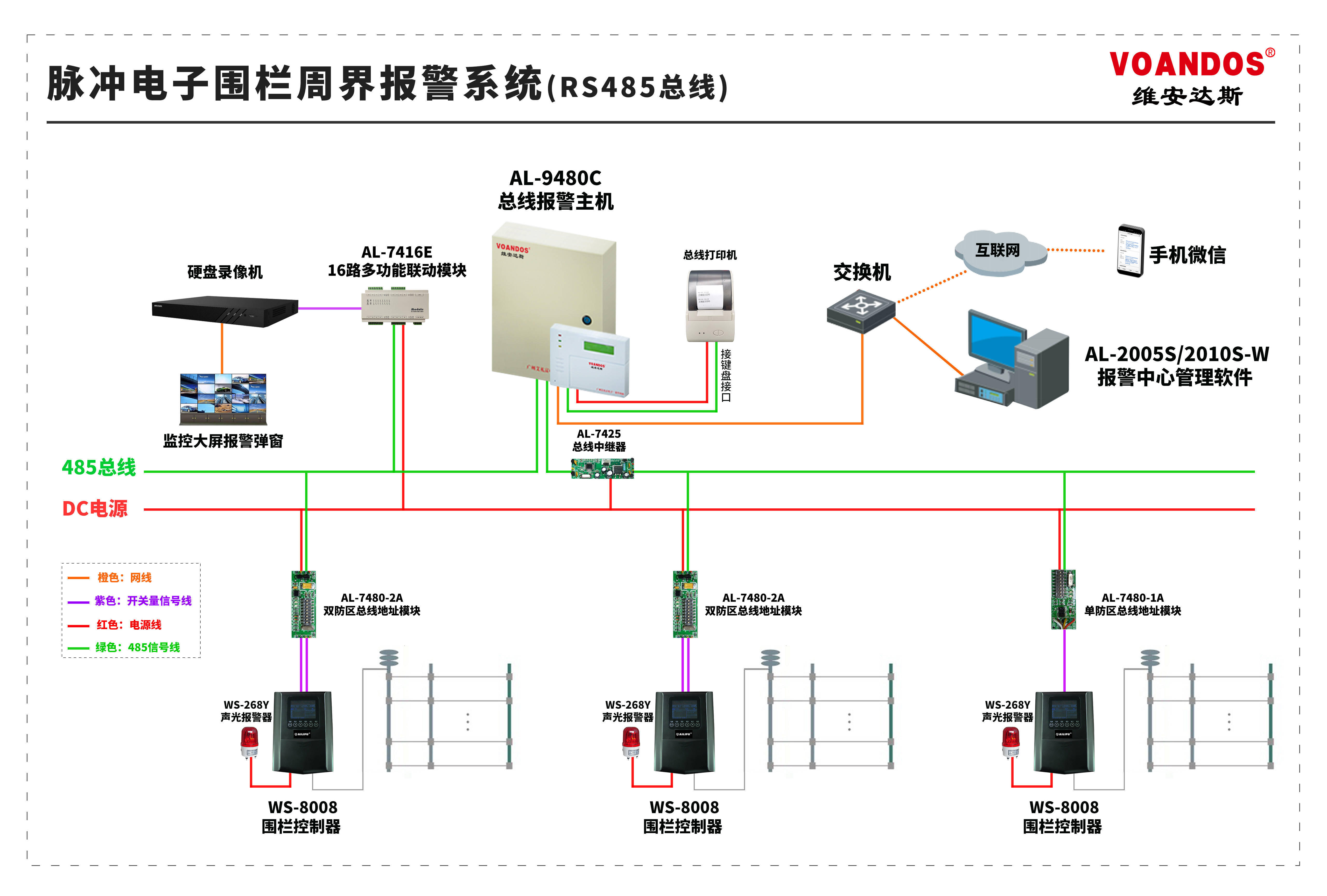
電子RS485總線脈沖電子圍欄周界報警系統(tǒng)應(yīng)用方案

RS-232總線與CAN-Modbus網(wǎng)絡(luò)的連接技術(shù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論