 一文教你傳感器的3種常用算法處理
一文教你傳感器的3種常用算法處理
在傳感器使用中,我們常常需要對傳感器數據進行各種整理,讓應用獲得更好的效果,以下介紹幾種常用的簡單處理方法:
1.加權平滑:平滑和均衡傳感器數據,減小偶然數據突變的影響;
2.抽取突變:去除靜態和緩慢變化的數據背景,強調瞬間變化;
3.簡單移動平均線:保留數據流最近的K個數據,取平均值;
01
加權平滑
使用算法如下:
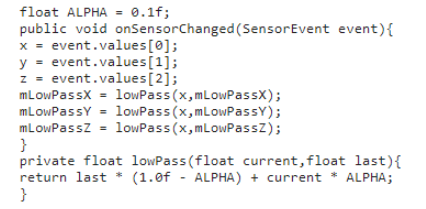
(新值) = (舊值)*(1 - a) + X * a其中a為設置的權值,X為最新數據,程序實現如下:
float ALPHA = 0.1f;
public void onSensorChanged(SensorEvent event){
x = event.values[0];
y = event.values[1];
z = event.values[2];
mLowPassX = lowPass(x,mLowPassX);
mLowPassY = lowPass(x,mLowPassY);
mLowPassZ = lowPass(x,mLowPassZ);
}
private float lowPass(float current,float last){
return last * (1.0f - ALPHA) + current * ALPHA;
}
02
抽取突變采用上面加權平滑的逆算法
實現代碼如下:
public void onSensorChanged(SensorEvent event){
final float ALPHA = 0.8;gravity[0] = ALPHA * gravity[0] + (1-ALPHA) * event.values[0];
gravity[1] = ALPHA * gravity[1] + (1-ALPHA) * event.values[1];
gravity[2] = ALPHA * gravity[2] + (1-ALPHA) * event.values[2];filteredValues[0] = event.values[0] - gravity[0];
filteredValues[1] = event.values[1] - gravity[1];
filteredValues[2] = event.values[2] - gravity[2];
}
03
簡單移動平均線
保留傳感器數據流中最近的K個數據,返回它們的平均值。k表示平均“窗口”的大小;
實現代碼如下:
public class MovingAverage{
private float circularBuffer[]; //保存傳感器最近的K個數據
private float avg; //返回到傳感器平均值
private float sum; //數值中傳感器數據的和
private float circularIndex; //傳感器數據數組節點位置
private int count;public MovingAverage(int k){
circularBuffer = new float[k];
count= 0;
circularIndex = 0;
avg = 0;
sum = 0;
}
public float getValue(){
return arg;
}
public long getCount(){
return count;
}
private void primeBuffer(float val){
for(int i=0;i
circularBuffer[i] = val;
sum += val;
}
}
private int nextIndex(int curIndex){
if(curIndex + 1 >= circularBuffer.length){
return 0;
}
return curIndex + 1;
}
public void pushValue(float x){
if(0 == count++){
primeBuffer(x);
}
float lastValue = circularBuffer[circularIndex];
circularBuffer[circularIndex] = x; //更新窗口中傳感器數據
sum -= lastValue; //更新窗口中傳感器數據和
sum += x;
avg = sum / circularBuffer.length; //計算得傳感器平均值
circularIndex = nextIndex(circularIndex);
}
}
審核編輯黃昊宇
-
傳感器
+關注
關注
2548文章
50740瀏覽量
752144
發布評論請先 登錄
相關推薦
一種改進的無線傳感器網絡非測距定位算法
基于多傳感器的多模型機動目標跟蹤算法設計
一文讀懂傳感器的原理與結構
一篇小短文教你了解工字電感的各項參數
一種多處理器平臺上的傳感器事務調度算法
一文教你怎么測量壓敏電阻的好壞
一種異質多傳感器的異步量測融合算法驗證

一文教你學會如何區分風速傳感器和風量傳感器
淺談傳感器中3種常用算法處理(含實現代碼)
淺析單片機開發中傳感器的數據處理算法





 工商網監
工商網監
評論