 Neuralink公司公布腦機接口技術出新進展
Neuralink公司公布腦機接口技術出新進展
韓國腦科學研究所和大邱慶北科技大學(DGIST)科研團隊發布最新研究成果,他們設計并構建了3D電磁驅動的微米級微型機器人,將小鼠胚胎的顱腦神經細胞附著在其表面,通過體外連接方式,在顯微鏡下精準移動并控制神經細胞,建立針對基礎腦科學領域的人工神經網絡平臺,實現人類通過體外形式利用機器人操控腦神經網絡的夢想。
據悉,該研究成果被發表在頂級科學期刊《科學進展》(Science Advances)雜志上。
本論文通訊作者,韓國大邱慶北科技大學(DGIST)的Hongsoo Choi(音譯“崔宏秀”)教授告訴鈦媒體App,在腦科學研究領域,在體外實現具有高可再現性,形態和功能復雜的神經網絡是諸如人工智能和腦工程等各種基礎研究的重要研究課題。
“這項研究中,通過使用專門制造的微型機器人作為媒介,開發了一個將神經細胞運輸到指定位置的平臺。通過這種方式,可以構建復雜而精確的神經網絡模型,同時將細胞損傷降至最低。另外,通過在以這種方式實現的神經網絡模型中測量由神經細胞發出的生理信號來驗證神經網絡連接的形成。”崔宏秀說。
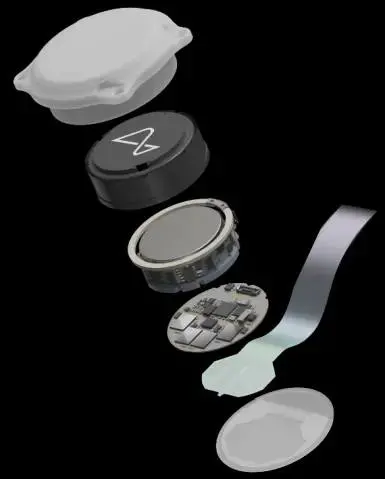
就在不久前的8月29日,埃隆·馬斯克(Elon Musk)聯合創辦的Neuralink公司公布腦機接口(BCI)技術新進展:利用最新發布的手術機器人V2,類似“縫紉機”的效果,將約為一枚硬幣大小的腦機接口設備Link V0.9植入到實驗豬的大腦,實現電波反饋,引發廣泛爭議。
實際上,Neuralink公布技術進展,更多屬于腦機接口(Brain Machine Interface)領域,這只是腦科學技術的其中一個領域。
腦科學被叫做認知科學,也可稱之為神經科學,這是一種探索大腦是如何工作的科學技術。腦科學研究大致可以分為以下三個領域:腦疾病防治研究、腦機接口研究和類腦智能研究。
而崔宏秀團隊發表的這篇論文,更多是在類腦智能研究中人工神經網絡 (Artificial neural network)領域的新技術成果。
“與馬斯克的Neuralink是不同的研究領域,很難直接去比較。”崔宏秀對鈦媒體App表示。
根據論文所述,在實驗開始之前,科研團隊發現,市面上沒有對電磁驅動的微型機器人與(人腦)神經是否可以連接進行相關試驗研究,且大家對這類型研究抱有很高的興趣,這讓團隊找到了新的研究方向,促成了該論文的發布。
崔宏秀教授對鈦媒體App表示,盡管有了研究方向,但這一實驗研究過程是復雜且具有挑戰的。
首先,科研團隊使用基于激光的超精密加工設備,制造出由外部磁場驅動和控制的微米級機器人。
據悉,這一微型機器人高27 μm,寬5 μm,深2 μm,頂部具有縱向微槽,且內置可量突信號傳輸的HD-MEA(離體微電極陣列)芯片,側面還有翻轉指標器(A rollover indicator),以識別微型機器人“排列矩陣”的正確排列順序。
微型機器人的制造過程示意圖
第二步,科研人員培養從小鼠胚胎的大腦中提取的神經細胞,使其附著在所制造的機器人矩陣的表面,觀察神經突(也稱為軸突和樹突)和神經元細胞體(體細胞)的長出情況,看大小是否易于控制。
第三步,科研人員將微型機器人上的這些神經突引導至其逐漸傾斜的末端,從而將它們緩和到周圍的基底上,表征在類似玻璃基板。在玻璃表面上實現500x500 μm的神經簇陣列。經過長時間的實驗與培育,最終細胞成功長到大約40 μm左右。
第四步,通過電荷耦合裝置,科研人員在半球形八個電磁線圈中完成疊加磁場部署環境。
最后一步,通過層層挑戰,在顯微鏡下,科研人員刺激并操縱神經簇(ANC)陣列。發現在體外環境下,神經細胞可以最快10秒內到達所需位置,并在1分鐘內實現與機器的通信連接,且微型機器人的控制精度在幾十μm級別(誤差范圍約為10%)。
通過這五個步驟,科研人員將所需數量的顱腦神經細胞遞送到指定位置,從而展示了顱腦神經網絡的可能性。
這一研究顯示出,腦神經網絡是可以在體外與機器人之間進行連接,人類可以通過微型機器人實現體外腦神經的精準操控,將未知的操縱潛力被激發出來。
科研團隊在論文中表示,新技術以高度可重復的方式提供了自然而簡單的連接環境,利用小鼠胚胎的腦神經細胞,結合腦科學+機器人,通過目標位置的培育和成長,最終精確實現神經連接和調節神經突觸。
崔宏秀教授認為,這項研究的核心是開發基于基礎腦科學領域的人工神經網絡平臺,整個實驗過程更多是在檢驗這一平臺是否順利連接。
當被問及這一研究是否具有局限性時,崔宏秀教授對鈦媒體App表示,由于使用的MEA芯片性能不是十分先進,因此在測量信號傳輸的時候,更多是在2D神經網絡環境中,與更復雜的腦組織3D結構數據并不完全一致。未來,科研團隊將對3D神經網絡的構造、3D神經網絡下測量的神經傳輸信號進行相關實驗和研究。
崔宏秀教授表示,未來他們依然會對人工神經網絡平臺進行深入研究。
“我們希望這項研究成果,為先進的人工神經網絡提供可控的體外模型潛在平臺。特別是在帕金森氏病和強迫癥患者中,利用該技術可以更快做出治療性干預措施,從而幫助他們緩解傷痛。”科研團隊在論文中這樣表示。
崔宏秀教授強調,在體外構造神經網絡是一項重要的研究任務,可以用作各種基礎性研究(如人工智能和腦工程)的平臺。這是實現腦科學技術的終極目標——“模擬大腦”(具有像人一樣智慧的機器)前的重要步驟。
原文標題:科學家利用微米級機器人實現體外腦神經操控,腦科學迎來新突破
文章出處:【微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
機器人
+關注
關注
210文章
28212瀏覽量
206565 -
腦機接口
+關注
關注
8文章
369瀏覽量
21474
原文標題:科學家利用微米級機器人實現體外腦神經操控,腦科學迎來新突破
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
未來已來:Neuralink引領腦機接口新紀元
馬斯克公布首位腦機接口受試者新進展!微美全息(WIMI.US)深入研究開啟智能革命性飛躍!
基于MEMS超聲波方案的“真”無線植入式腦機接口技術
國內腦機接口研究再迎新進展!微美全息(WIMI.US)斬獲V-BCI技術專利助力科技騰飛!
馬斯克腦機接口技術迎來歷史性時刻
馬斯克稱首位腦機接口受試者或已康復
腦機接口,帶火傳感器
馬斯克:人類首次接受腦機接口芯片植入,植入者恢復良好
腦機接口將在十年內實現市場化應用,微美全息(WIMI.US)提前入局穩步推進邁入增長階段

一場走在科技最前沿的頭腦風暴:腦機接口技術的機遇與挑戰






 工商網監
工商網監
評論