 研究人員開發了一種新型的磁力驅動高速軟件機器人
研究人員開發了一種新型的磁力驅動高速軟件機器人
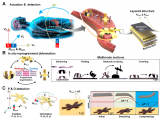
《通訊-材料》最近發表了一篇關于技術研究和開發的論文,研究人員成功地開發了一種新型的磁力驅動高速軟件機器人,它可以行走、游泳、漂浮和捕捉活蠅。
機器人形狀像紙,可以像蟬翼一樣薄。這種材料嵌入在一個小磁鐵中,不需要電驅動,可以根據磁場的變化改變形狀和動作。
在機器人中嵌入微型磁鐵,它能快速響應磁場,達到迄今為止最高的比能量密度,這是在低磁場下高速驅動的關鍵。
在實驗實例中,重23 mg、厚200 um的四臂機器人在3.7mt磁場作用下漂浮;在17 mm×19 mm、80μm厚的水中傳播物體;六臂機器人可捕獲、搬運和釋放直徑為20 mm、厚度為80μm的非磁性物體。
一只花機器人在觸發陷阱后抓住了一只蒼蠅,然后打開了由磁力驅動的八只手臂來釋放它,直徑為25毫米,厚度為200微米。
責任編輯:YYX
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
磁場
+關注
關注
3文章
733瀏覽量
24128 -
機器人
+關注
關注
210文章
27832瀏覽量
204546
原文標題:科學家研發出軟體機器人:薄如蟬翼 會行走 懸浮
文章出處:【微信號:tjrobot,微信公眾號:天津機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
他機器人軟件框架一起使用,如ROS已與OpenRAVE、Orocos和Player集成。正是由于這一特點,探索開發ROS系統的
發表于 07-09 11:38
研究人員提出一種電磁微鏡驅動系統
領域。MEMS微鏡作為一種微光機電系統(MOEMS),已廣泛應用于醫療、汽車、消費和軍事電子等眾多領域。當前,業界對具有廣闊前景的小型激光雷達的需求不斷增長。之前,已有研究開發了大量使用電熱、靜電、壓電和電磁
abb工業機器人的編程語言是什么
編程而設計。RAPID語言具有易學易用、功能強大、靈活性高等特點,廣泛應用于ABB工業機器人的編程和應用開發。 ABB工業機器人編程語言RAPID概述 RAPID語言簡介 RAPID是一種
全球機器人開發領域采用NVIDIA 機器人開發和生產
機器人開發領域的領先企業正在采用NVIDIA Isaac機器人平臺來研究、開發和生產下一代 AI
三星停止自動駕駛研究,開發人員轉到機器人領域
近日,三星電子宣布了一項重要的研發戰略調整。據業內人士透露,三星先進技術研究院(SAIT)已決定停止自動駕駛汽車的研究,并將這一領域的開發人員
一種可實現穩定壓力傳感的新型可拉伸電子皮膚
現有的電子皮膚會隨材料拉伸而降低傳感精度。美國得克薩斯大學奧斯汀分校研究人員開發出一種新型可拉伸電子皮膚,解決了這項新興技術的一個主要難題。
視覺機器人焊接的研究現狀
視覺機器人焊接技術是將計算機視覺與機器人技術相結合,實現自動焊接過程中的實時檢測、跟蹤和控制。這一領域的研究一直處于不斷發展之中,吸引了眾多

LabVIEW的六軸工業機器人運動控制系統
LabVIEW開發六軸工業機器人運動控制系統
本項目開發了一個高效的工業機器人控制系統,重點關注于運動學算法和軌跡規劃算法的實現和測試。La
發表于 12-21 20:03
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
是一個開源免費,架構精簡的機器人操作系統。ROS被設計為盡可能精簡,以便為ROS編寫的代碼可與其他機器人軟件框架一起使用,如ROS已與Ope
發表于 11-30 16:01

小到一個分子!研究人員開發一種微小的壓電電阻器
使用壓阻的電子傳感器在許多設備中都很常見,包括汽車、醫療可穿戴設備和智能手機。現在,澳大利亞的研究人員開發了一種微小的壓電電阻器,小到一個分子,可以實現
一種全新磁控機器人設計制造技術研究
北京航空航天大學陳華偉教授課題組報道了一種全新磁控機器人設計制造技術,針對磁控機器人的原位運動編程和位姿感知需求,通過4D噴涂打印制備一種新的碳-磁薄膜多層材料,實現電熱磁化和電阻應變
發表于 09-26 12:37
?774次閱讀





 工商網監
工商網監
評論