") 帶你重新認(rèn)識(shí)了一下真正的PID
帶你重新認(rèn)識(shí)了一下真正的PID
網(wǎng)上關(guān)于PID算法的文章很多,但是感覺(jué)有必要自己再進(jìn)行一次總結(jié),抽絲剝繭地重新認(rèn)識(shí)了一下PID;
1 前言
2 開(kāi)環(huán)控制
3 閉環(huán)控制
4 PID
4.1 系統(tǒng)架構(gòu)
4.2 理論基礎(chǔ)
4.3 離散化
4.4 偽算法
5 C++實(shí)現(xiàn)
6 總結(jié)
1 前言
控制系統(tǒng)通常根據(jù)有沒(méi)有反饋會(huì)分為開(kāi)環(huán)系統(tǒng)和閉環(huán)系統(tǒng),在閉環(huán)系統(tǒng)的控制中,PID算法非常強(qiáng)大,其三個(gè)部分分別為;
P:比例環(huán)節(jié);
I:積分環(huán)節(jié);
D:微分環(huán)節(jié);
PID算法可以自動(dòng)對(duì)控制系統(tǒng)進(jìn)行準(zhǔn)確且迅速的校正,因此被廣泛地應(yīng)用于工業(yè)控制系統(tǒng)。
2 開(kāi)環(huán)控制
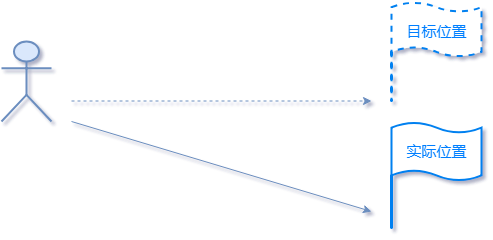
首先來(lái)看開(kāi)環(huán)控制系統(tǒng),如下圖所示,隆哥蒙著眼,需要走到虛線旗幟所表示的目標(biāo)位置,由于缺少反饋(眼睛可以感知當(dāng)前距離和位置,由于眼睛被蒙上沒(méi)有反饋,所以這也是一個(gè)開(kāi)環(huán)系統(tǒng)),最終隆哥會(huì)較大概率偏離預(yù)期的目標(biāo),可能會(huì)運(yùn)行到途中實(shí)線旗幟所表示的位置。
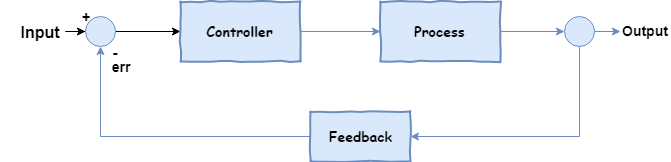
開(kāi)環(huán)系統(tǒng)的整體結(jié)構(gòu)如下所示;

這里做一個(gè)不是很恰當(dāng)?shù)谋扔鳎?/p>
Input:告訴隆哥目標(biāo)距離的直線位置(10米);
Controller:隆哥大腦中計(jì)算出到達(dá)目標(biāo)所需要走多少步;
Process:雙腿作為執(zhí)行機(jī)構(gòu),輸出了相應(yīng)的步數(shù),但是最終仍然偏離了目標(biāo);
看來(lái)沒(méi)有反饋的存在,很難準(zhǔn)確到達(dá)目標(biāo)位置。
3 閉環(huán)控制
所以為了準(zhǔn)確到達(dá)目標(biāo)位置,這里就需要引入反饋,具體如下圖所示;
在這里繼續(xù)舉個(gè)不怎么恰當(dāng)?shù)谋扔鳎宦「缰孬@光明之后,基本可以看到目標(biāo)位置了;
第一步Input:告訴隆哥目標(biāo)距離的直線位置(10米);
第二步Controller:隆哥大腦中計(jì)算出到達(dá)目標(biāo)所需要走多少步;
第三步Process:雙腿作為執(zhí)行機(jī)構(gòu),輸出了相應(yīng)的步數(shù),但是最終仍然偏離了目標(biāo);
第四步Feedback:通過(guò)視覺(jué)獲取到目前已經(jīng)前進(jìn)的距離,(比如前進(jìn)了2米,那么還有8米的偏差);
第五步err:根據(jù)偏差重新計(jì)算所需要的步數(shù),然后重復(fù)上述四個(gè)步驟,最終隆哥達(dá)到最終的目標(biāo)位置。
4 PID
4.1 系統(tǒng)架構(gòu)
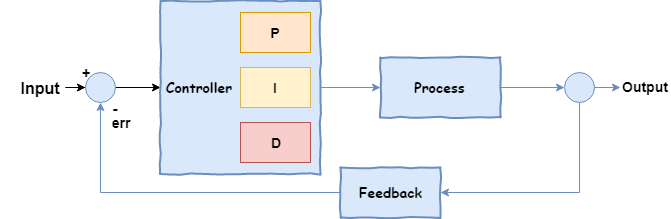
雖然在反饋系統(tǒng)下,隆哥最終到達(dá)目標(biāo)位置,但是現(xiàn)在又來(lái)了新的任務(wù),就是又快又準(zhǔn)地到達(dá)目標(biāo)位置。所以這里隆哥開(kāi)始采用PID Controller,只要適當(dāng)調(diào)整P,I和D的參數(shù),就可以到達(dá)目標(biāo)位置,具體如下圖所示;
隆哥為了最短時(shí)間內(nèi)到達(dá)目標(biāo)位置,進(jìn)行了不斷的嘗試,分別出現(xiàn)了以下幾種情況;
跑得太快,最終導(dǎo)致沖過(guò)了目標(biāo)位置還得往回跑;
跑得太慢,最終導(dǎo)致到達(dá)目標(biāo)位置所用時(shí)間太長(zhǎng);
經(jīng)過(guò)不斷的嘗試,終于找到了最佳的方式,其過(guò)程大概如下圖所示;
這里依然舉一個(gè)不是很恰當(dāng)?shù)谋扔鳎?/p>
第一步:得到與目標(biāo)位置的距離偏差(比如最開(kāi)始是10米,后面會(huì)逐漸變小);
第二步:根據(jù)誤差,預(yù)估需要多少速度,如何估算呢,看下面幾步;
P比例則是給定一個(gè)速度的大致范圍,滿足下面這個(gè)公式;
因此比例作用相當(dāng)于某一時(shí)刻的偏差(err)與比例系數(shù)的乘積,具體如下所示;
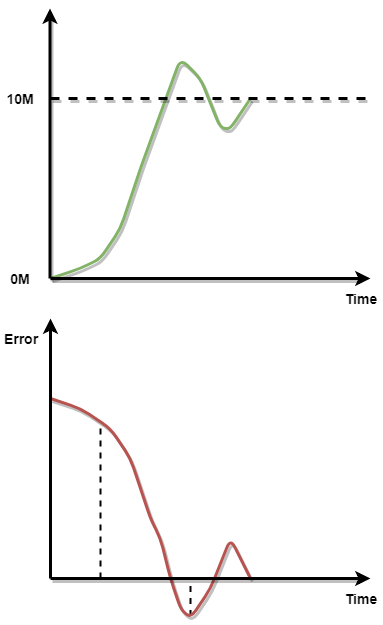
比例作用
綠色線為上述例子中從初始位置到目標(biāo)位置的距離變化;紅色線為上述例子中從初始位置到目標(biāo)位置的偏差變化,兩者為互補(bǔ)的關(guān)系;
I積分則是誤差在一定時(shí)間內(nèi)的和,滿足以下公式;
如下圖所示;
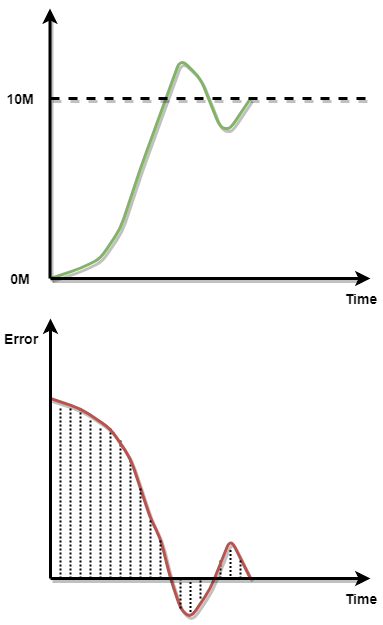
紅色曲線陰影部分面積即為積分作用的結(jié)果,其不斷累積的誤差,最終乘以積分系數(shù)就得到了積分部分的輸出;
D微分則是誤差變化曲線某處的導(dǎo)數(shù),或者說(shuō)是某一點(diǎn)的斜率,因此這里需要引入微分;
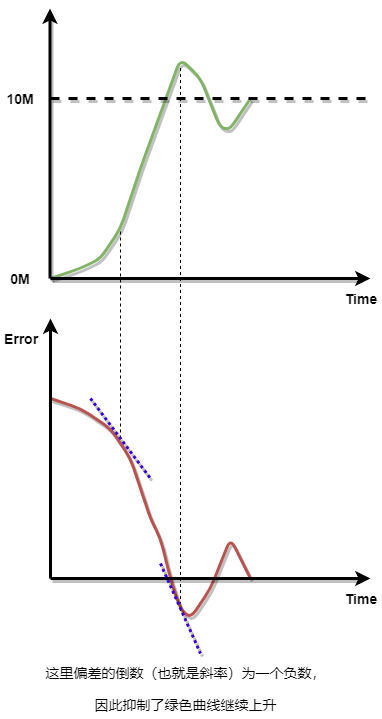
從圖中可知,當(dāng)偏差變化過(guò)快,微分環(huán)節(jié)會(huì)輸出較大的負(fù)數(shù),作為抑制輸出繼續(xù)上升,從而抑制過(guò)沖。
綜上,,分別增加其中一項(xiàng)參數(shù)會(huì)對(duì)系統(tǒng)造成的影響總結(jié)如下表所示;
| 參數(shù) | 上升時(shí)間 | 超調(diào)量 | 響應(yīng)時(shí)間 | 穩(wěn)態(tài)誤差 | 穩(wěn)定性 |
|---|---|---|---|---|---|
| Kp | 減少 | 增加 | 小變化 | 減少 | 降級(jí) |
| Ki | 減少 | 增加 | 增加 | 消除 | 降級(jí) |
| Kd | 微小的變化 | 減少 | 減少 | 理論上沒(méi)有影響 | 小,穩(wěn)定性會(huì)提升 |
4.2 理論基礎(chǔ)
上面扯了這么多,無(wú)非是為了初步理解PID在負(fù)反饋系統(tǒng)中的調(diào)節(jié)作用,下面開(kāi)始推導(dǎo)一下算法實(shí)現(xiàn)的具體過(guò)程;PID控制器的系統(tǒng)框圖如下所示;
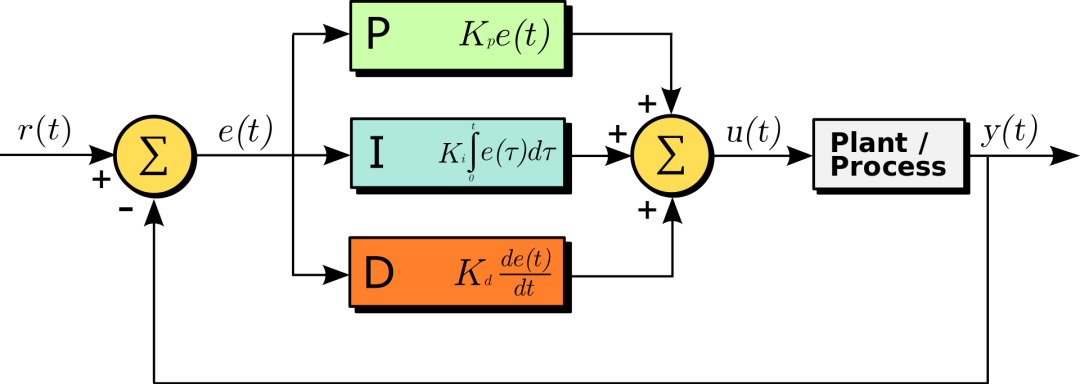
圖片來(lái)自Wiki
因此不難得出輸入和輸出的關(guān)系;
是比例增益;是積分增益;是微分增益;
4.3 離散化
在數(shù)字系統(tǒng)中進(jìn)行PID算法控制,需要對(duì)上述算法進(jìn)行離散化;假設(shè)系統(tǒng)采樣時(shí)間為則將輸入序列化得到;
將輸出序列化得到;
比例項(xiàng):離散化
積分項(xiàng):
微分項(xiàng):
所以最終可以得到式①,也就是網(wǎng)上所說(shuō)的位置式PID:
將式①再做一下簡(jiǎn)化;
最終得到增量式PID的離散公式如下:
4.4 偽算法
這里簡(jiǎn)單總結(jié)一下增量式PID實(shí)現(xiàn)的偽算法;
previous_error:=0//上一次偏差 integral:=0//積分和 //循環(huán) //采樣周期為dt loop: //setpoint設(shè)定值 //measured_value反饋值 error:=setpoint?measured_value//計(jì)算得到偏差 integral:=integral+error×dt//計(jì)算得到積分累加和 derivative:=(error?previous_error)/dt//計(jì)算得到微分 output:=Kp×error+Ki×integral+Kd×derivative//計(jì)算得到PID輸出 previous_error:=error//保存當(dāng)前偏差為下一次采樣時(shí)所需要的歷史偏差 wait(dt)//等待下一次采用 gotoloop
5 C++實(shí)現(xiàn)
這里是增量式PID算法的C語(yǔ)言實(shí)現(xiàn);
pid.cpp
#ifndef_PID_SOURCE_ #define_PID_SOURCE_ #include
pid.h
#ifndef_PID_H_ #define_PID_H_ classPIDImpl; classPID { public: //Kp-proportionalgain //Ki-Integralgain //Kd-derivativegain //dt-loopintervaltime //max-maximumvalueofmanipulatedvariable //min-minimumvalueofmanipulatedvariable PID(doubledt,doublemax,doublemin,doubleKp,doubleKd,doubleKi); //Returnsthemanipulatedvariablegivenasetpointandcurrentprocessvalue doublecalculate(doublesetpoint,doublepv); ~PID(); private: PIDImpl*pimpl; }; #endif
pid_example.cpp
#include"pid.h" #include
編譯并測(cè)試;
g++-cpid.cpp-opid.o #Tocompileexamplecode: g++pid_example.cpppid.o-opid_example
6 總結(jié)
本文總結(jié)了PID控制器算法在閉環(huán)系統(tǒng)中根據(jù)偏差變化的具體調(diào)節(jié)作用,每個(gè)環(huán)節(jié)可能對(duì)系統(tǒng)輸出造成什么樣的變化,給出了位置式和增量式離散PID算法的推導(dǎo)過(guò)程,并給出了位置式算法的C++程序?qū)崿F(xiàn)。
由于作者能力和水平有限,文中難免存在錯(cuò)誤和紕漏,請(qǐng)不吝賜教。
責(zé)任編輯:YYX
-
PID算法
+關(guān)注
關(guān)注
2文章
171瀏覽量
24272 -
PID
+關(guān)注
關(guān)注
35文章
1471瀏覽量
85308 -
開(kāi)環(huán)控制
+關(guān)注
關(guān)注
2文章
29瀏覽量
5113
原文標(biāo)題:簡(jiǎn)易PID算法的快速掃盲
文章出處:【微信號(hào):WW_CGQJS,微信公眾號(hào):傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
最近在網(wǎng)上認(rèn)識(shí)了一位大神,跟著他讓我的生活高了不止一個(gè)檔次
最近在網(wǎng)上認(rèn)識(shí)了一個(gè)大神,跟著他讓我生活提高了不止一個(gè)檔次
電力電子技術(shù)向高頻領(lǐng)域發(fā)展應(yīng)重新認(rèn)識(shí)的概念
電力電子技術(shù)向高頻領(lǐng)域發(fā)展應(yīng)重新認(rèn)識(shí)的幾個(gè)概念
從知識(shí)平臺(tái)角度重新認(rèn)識(shí)集成電路
EMC與地:來(lái)重新認(rèn)識(shí)一下地
vr技術(shù)如何帶你走進(jìn)動(dòng)物的世界
因美國(guó)制裁華為,讓全世界重新認(rèn)識(shí)了華為
或許工業(yè)互聯(lián)網(wǎng)值得被重新認(rèn)識(shí)

虹科帶你來(lái)了解一下汽車以太網(wǎng)和TSN的測(cè)試標(biāo)準(zhǔn)

一文帶你重新認(rèn)識(shí)桌面云
認(rèn)識(shí)一下幾個(gè)常用的門級(jí)電路





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論