") 基于汽車智能駕駛的多光譜激光雷達方案研究
基于汽車智能駕駛的多光譜激光雷達方案研究
作者:宋紹京,陳育偉,胡海江,胡金艷,龔玉梅,邵慧
在汽車智能駕駛系統(tǒng)中,激光雷達由于其獨特的三維成像能力,成為場景探測感知傳感器群組中不可或缺的組成部分。為提升單一波長激光雷達在物性探測分類和狀態(tài)上的性能,借鑒多光譜探測具有物性探測能力的原理,論文對適用于汽車智能駕駛的多光譜激光雷達的波段選擇進行了可行性研究,利用主成分分析法對智能駕駛中典型目標進行光譜計算及分析。
結(jié)合激光光源特性以及光電探測器的特性,綜合多光譜激光雷達波段選擇方法和智能駕駛應(yīng)用場景中典型目標地物光譜特性,以及商用激光雷達的可獲得性,得出了適用汽車智能駕駛的多光譜激光雷達的波長可以選擇 808 nm、905 nm、1 064 nm、1 310 nm,并通過測試驗證了多光譜激光雷達所選波長的有效性。
為了更好地利用激光雷達技術(shù)的環(huán)境觀測能力,國內(nèi)外學者針對融合單波長激光回波信號的強度信息和三維信息對數(shù)據(jù)進行分類開展了大量研究和探索,當前智能駕駛中使用的激光雷達在技術(shù)上的研究主要集中于單一波長方式工作。
為提升激光回波信號的強度信息和三維信息對數(shù)據(jù)進行分類的支持,不斷地提高激光雷達點云密度,但這些研究并不能從根本上解決車載激光雷達單一波長所造成的物性探測能力上的不足,點云密度的增加雖可提高基于點云幾何特征的物體識別能力,但也存在遞減效應(yīng),且?guī)碇T多額外的系統(tǒng)要求:
1)用于場景識別的算法日益復雜化,導致計算硬件需求劇烈增加;
2)激光雷達的功耗、復雜性、體積和成本大大增加,阻礙其大規(guī)模商用;
3)僅依靠三維特征,不足以有效識別復雜場景。因此,雖然激光雷達在三維空間信息獲取方面具有突出優(yōu)點,但由于激光雷達單一波長探測能力的限制,對環(huán)境信息中的物性分類、狀態(tài)等方面的探測能力仍舊有待提高。
光譜成像技術(shù)不僅具有圖像分辨能力,還具有光譜分辨能力,利用光譜成像技術(shù)不僅可以對待檢測目標進行定性和定量分析,而且還能對其進行定位分析。針對目前智能駕駛環(huán)境觀測中激光雷達的應(yīng)用及其技術(shù)特點。
為了更好的挖掘出激光雷達對環(huán)境感知應(yīng)用的潛力,使激光雷達技術(shù)在保留空間高分辨探測能力的同時,兼具對環(huán)境中物體物性感知的能力,因此,借鑒多、高光譜測量具有物性探測能力的原理,開展多光譜激光雷達對環(huán)境物體進行探測的技術(shù)研究將具有重要的研究價值和應(yīng)用前景。
1. 激光雷達波長選擇方法
激光波長的選擇原則為:在波長數(shù)盡可能少的情況下,實現(xiàn)對不同目標分類或同種目標不同狀態(tài)的判別,為多光譜激光雷達的激光器設(shè)置提供依據(jù)。
特征波長的選擇算法經(jīng)過長時間的發(fā)展,目前廣泛使用的主要有主成分分析法(Principal Compo‐nent Analysis,PCA))、偏 最 小 二 乘 算 法(Partial Least Squares,PLS)、嶺 回 歸(Ridge Regression, RR)、逐步回歸(Step Rise Regression,SRA)、多元線性回歸(Multiple Linear Regression,MLR)等算法。
其中主成分分析法和偏最小二乘法是將分析波段內(nèi)的光譜數(shù)據(jù)通過正交變換的方法將原來的多個參數(shù)轉(zhuǎn)換為少數(shù)主成分的多元統(tǒng)計方法,對經(jīng)轉(zhuǎn)換得到的主成分再建立回歸方程,與多元線性回歸、逐步回歸和嶺回歸相比,分析準確度有所提高,偏最小二乘法在確定最佳主成分數(shù)目上存在不足。
而主成分分析算法是將原始波段數(shù)據(jù)的各變量進行正交變換,把原始波段數(shù)據(jù)映射到一個新的空間,在新空間中,原始波段數(shù)據(jù)各變量的大部分信息經(jīng)過變化后被壓縮在較少的幾個波段中,這幾個波段稱之為主成分。
實際上,這些主成分是原始波段數(shù)據(jù)各變量經(jīng)過線性組合后形成的新變量,這些新變量盡可能多地表征了原始變量所包含的特征信息,且新變量之間互不相關(guān),即正交。因此,在新變量即主成分數(shù)目的確定上存在著優(yōu)勢。即便變換后的各主成分的物理意義不明確,但主成分分析法卻很好的實現(xiàn)了波段降維。
如果所探測目標成分的吸收譜線相互之間沒有交叉與重疊,利用主成分分析方法可以取得較理想的結(jié)果。基于智能駕駛應(yīng)用場景中典型目標光譜反射曲線的分析,基本上不存在峰值譜線相互交叉與重疊的情況,因此主成分分析法可以用于確定激光雷達波長的分析。
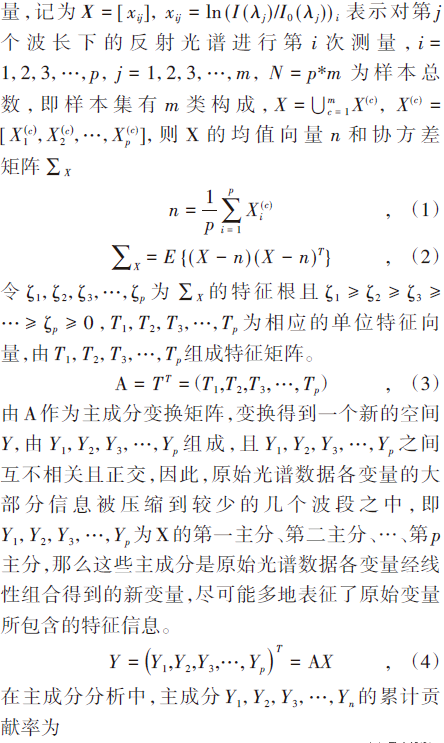
設(shè)對 m 個波長下的反射光譜重復進行 p 次測量,記為 :
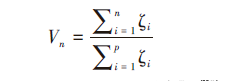
成分累計貢獻率越大,主成分解釋原變量數(shù)據(jù)變化的能力越強,因此該貢獻率是數(shù)據(jù)降維處理的重要指標。如果所選成分太多,會包含過多的測量噪聲;如果所選成分過少,必然會丟失原始光譜數(shù)據(jù)中的部分特征信息。
該指標的選取根據(jù)不同的應(yīng)用,選用的標準亦有所不同,因此選擇累計貢獻率 Vn 大于某一值(經(jīng)驗值 93%)的前 n 個主成分代替原來的光譜,以減小數(shù)據(jù)量,同時又可以很好的實現(xiàn)有效的波段降維,但是該方法變換后的主成分的物理意義不明確。
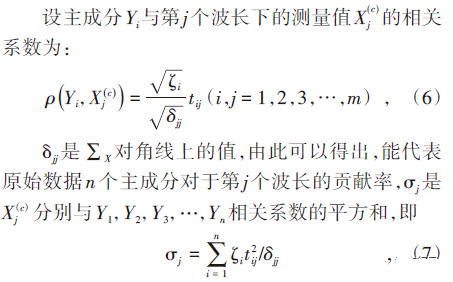
σ的大小反應(yīng)了該波長下有多少信息被映射到了前 n 個主成分中,而在主成分信息中,本身就包含了原始光譜數(shù)據(jù)中的大部分特征信息,也就是說σ 本身也反映了該波長所包含的信息量,因此,通過結(jié)合累計貢獻率和因子載荷 σ 可以確定主成分及相應(yīng)的物理意義。
2. 智能駕駛應(yīng)用場景中典型目標光譜特性測試及分析
智能駕駛應(yīng)用場景隨著用途的不同而有所不同,特定場景的智能駕駛項目主要集中在固定路線、封閉園區(qū)方向上,典型應(yīng)用場景包括園區(qū)通勤、碼頭、礦山、倉儲和物流等方面,這些應(yīng)用場景中的目標相對比較簡單,類別也比較固定。
目前,相比較特定場景下的智能駕駛,通用場景對于 L4 級別的智能駕駛?cè)匀痪哂泻艽蟮奶魬?zhàn),在城市公開道路應(yīng)用場景中的目標各種各樣,類別也比較復雜,但總體而言,針對智能駕駛應(yīng)用場景中的目標可以大致分為人類、植物、道路、建筑、車輛等目標。
研究行人光譜特性,主要研究穿著在人體上的衣服的光譜特性,常見人類所穿衣物多為棉織物和滌綸織物,根據(jù)圖 1(a)所示光譜反射特性曲線可以看出,棉織物在可見光光譜區(qū)間根據(jù)棉織物的顏色不同,會有著比較明顯不同的光譜曲線,但在光譜超過 800 nm 后的近紅外波段里,棉織物的光譜反射特性基本一致的穩(wěn)定在 60%左右,和棉織物的顏色基本上沒有關(guān)系。
從圖 1.( b)中所示光譜反射特性曲線可以看出,未染色和染色的光譜特性曲線差異性特別明顯,但染色后的光譜特性曲線在光譜超過 800 nm 的近紅外波段中的其反射率也基本上穩(wěn)定在 60%左右。
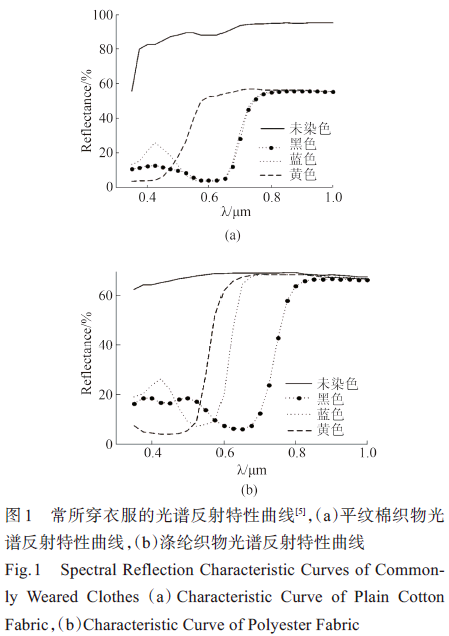
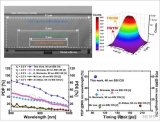
圖 2 中所示為上海典型植物光譜反射特性曲線,其中在可見光的 550 nm 左右有一個反射波峰,在 680 nm 附近有一個吸收波峰,在 680 ~740 nm 之間,紅邊效應(yīng)明顯,各種植物的反射率急速增加。在近紅外區(qū)域,道路兩旁和道路中間作為綠化隔離帶的植物,其反射率基本上處在 35%至 60%之間。
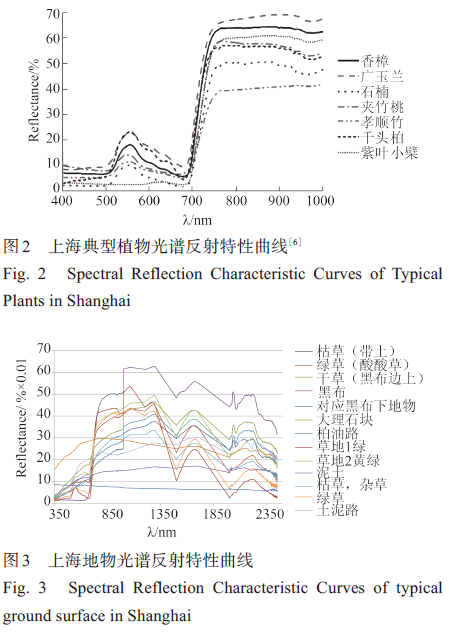
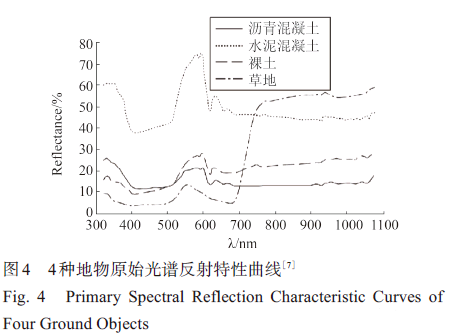
圖 3 中部分曲線為上海本地采集的雜草光譜反射特性曲線,與圖 2 所示上海植物的光譜特性一樣,在 680 nm 處均有一個典型的吸收波峰,紅邊效應(yīng)明顯。
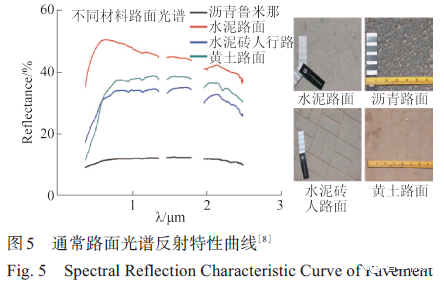
一旦進入近紅外區(qū)域,草類的光譜反射率急速增加,超過 800 nm 后基本上穩(wěn)定在 40%-50% 的反射率范圍內(nèi),圖 4 中所示的草地光譜反射特性曲線和圖 3 中的數(shù)據(jù)基本一致。
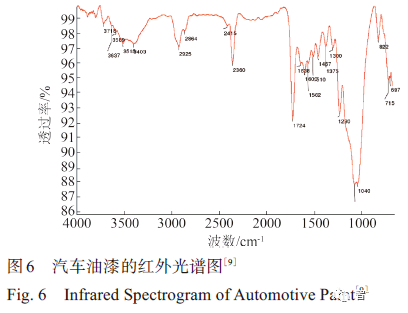
根據(jù)圖 4 和圖 5 所示的瀝青混凝土道路的光譜特性曲線可知,瀝青路面在近紅外區(qū)域內(nèi)光譜反射率基本上維持在 15% 左右。水泥路面在近紅外區(qū)域內(nèi)的光譜反射率基本上維持在 45% 左右。
而裸土土路地面由于各個區(qū)域中的土地成分差異性比較大,因此其光譜反射率也會存在著比較大的差異,從圖 4 和圖 5 中也能看出來光譜的反射率存在著較為明顯的差異。
道路上行駛的機動車和非機動車,在外表面基本上都覆蓋著油漆,不同廠家,不同品牌,它們采用的油漆工藝和成分并不完全一樣,即便是同一廠家同一品牌,不同批次采用的油漆工藝和成分也有可能不一樣。
因此,道路上行駛的車輛的車身油漆的光譜具有不同的特征,但根據(jù)圖 6 所示,車輛在近紅外波段里,其反射率超過 60%.
3. 激光雷達波長及光源的確定
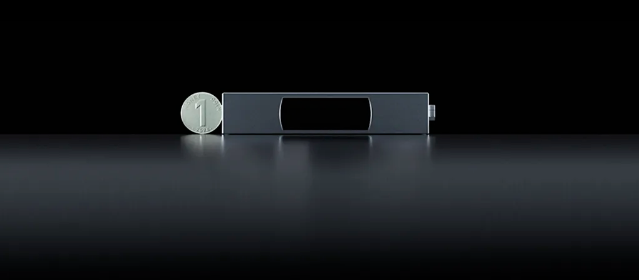
通過對上述智能駕駛應(yīng)用場景中各個目標物體的光譜特性分析,根據(jù)主成分分析法,針對 2 151 個波長,進行了 13 次測量,根據(jù)公式(1)~(4)計算進行波段的選取,再根據(jù)公式(7)計算各自的相對貢獻率,得出前 4 個主成分相對的貢獻率如表 1 所示。
從表 1 可以看出,采用光譜能量空間變換形式進行主成分分析,前 4 個主成分解釋了幾乎 93%以上的光譜能量空間變換信息,從而得出適合智能駕駛激光雷達的敏感波段范圍為 780~850 nm,880~950nm,1 025~1 095 nm,1 285~1 405 nm。
然而多光譜激光雷達波長選擇的最終確定還需要全面考慮以下幾個方面:
(1)從地物探測和識別能力來說主要考慮兩個方面,一方面所選擇的波段組合要保持盡可能多的目標信息量;另外一方面需要進行判別的目標在所選擇的波段組合上類別可分性最強。
(2)對于激光雷達傳感器的光譜波段選擇,需要考慮以下四個因素:
a)激光雷達傳感器的光譜敏感性;
b)研究目標的信息盡可能多地包含在所選光譜波段范圍內(nèi),
c)在選擇的波段范圍內(nèi)是否存在大氣窗口;
d)在選擇的波段范圍對人眼是否有安全影響。
(3)多光譜激光雷達傳感器在考慮所研究目標光譜輻射特性對傳感器光譜波段選擇的影響時,既要考慮研究目標在該波段的光譜特征及該波段對研究目標識別的能力,又要盡可能減小各波段間的相關(guān)性,增加信息量。
在滿足以上 3 方面的基礎(chǔ)上,多光譜激光雷達的波長設(shè)置還需要考慮激光光源特性以及光電探測器的特性,綜合多光譜激光雷達波段選擇方法和智能駕駛應(yīng)用場景中典型目標地物光譜特性分析。
根據(jù)激光光源和大氣影響因素兩個方面的分析,采用 Class I 激光器安全級別,排除掉不適合的波段范圍和波長,最終確定多光譜激光雷達的激光光源可選波長為 808 nm、905 nm、1 064 nm、1 310 nm。
其中 808 nm 的激光二極管為舞臺激光燈中所常用,905 nm 為當前智能駕駛激光雷達(速騰聚創(chuàng),Velo‐dyne)中所用,1 064 nm 為激光切割與焊接中所常用的波長,1 310 nm 為光通信常用波長。
4. 結(jié)論
通過主成分分析法對面向汽車智能駕駛在公開道路復雜應(yīng)用場景中人類、植物、道路,建筑,車輛等目標的光譜數(shù)據(jù)進行計算與分析,考慮面向汽車智能駕駛的激光雷達光源特性及光電特性,綜合目標地物光譜特性和產(chǎn)業(yè)現(xiàn)狀,確定出面向汽車智能駕駛多光譜激光雷達的激光光源可選波長為 808nm、905 nm、1 064 nm、1 310 nm。
該波長組合選擇,在保證對智能駕駛應(yīng)用場景中各類目標物性有效探測進行分類的前提下,光譜通道數(shù)少,提高了光譜識別的效率,在實際系統(tǒng)設(shè)計中具有很大的指導意義,不僅能夠滿足物性分類探測,又能減少系統(tǒng)設(shè)計空間;不僅能節(jié)約系統(tǒng)搭建成本,又能保證數(shù)據(jù)處理和反演的效率。
編輯:hfy
-
光譜
+關(guān)注
關(guān)注
4文章
796瀏覽量
35087 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2457瀏覽量
48654 -
激光雷達
+關(guān)注
關(guān)注
967文章
3940瀏覽量
189602
發(fā)布評論請先 登錄
相關(guān)推薦
智能駕駛浪潮下,車載激光雷達行業(yè)深度剖析與未來展望
激光雷達的維護與故障排查技巧
一文看懂激光雷達

森思泰克全新推出96線激光雷達和192線激光雷達產(chǎn)品

Luminar: 特斯拉是其最大激光雷達客戶
激光雷達新形態(tài)!體積縮小60%,成本大幅下降,有望進入千元機時代?
激光雷達的應(yīng)用場景
零跑汽車與禾賽科技戰(zhàn)略合作 激光雷達智能駕駛方案加速滲透

激光雷達賽道再有新玩家入局,智能汽車增量部件是趨勢?
亮道智能:發(fā)布全新一代激光雷達,未來主攻固態(tài)激光雷達低價市場
現(xiàn)代汽車和起亞汽車宣布開發(fā)片上激光雷達傳感器
汽車激光雷達:競爭格局和技術(shù)演進






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論