 如何選擇Mosfet驅動程序進行運動控制
如何選擇Mosfet驅動程序進行運動控制
工程師經常使用柵極驅動器或“預驅動器” IC以及N溝道功率MOSFET來提供驅動電動機所需的高電流。重要的是要考慮與選擇驅動器IC,MOSFET以及在某些情況下相關的無源組件有關的所有設計注意事項。通常,對該過程的了解不多,實現方式也不盡人意。讓我們開始討論為預驅動器/功率MOSFET電路選擇組件的簡單方法,以及由此產生的系統性能。
設計直流電動機驅動器(無論是有刷電動機還是三相無刷電動機),電動機的特性將決定驅動器的設計細節。有助于定義驅動器設計的兩個主要因素是電動機的工作電壓和電流要求。
但是,這些參數并不像人們最初想到的那么簡單。電機通常具有給定的電壓和電流額定值,實際運行值可能會根據應用情況而與這些額定值不同。施加的電壓決定了電動機的速度。電動機所需的電流取決于施加在電動機上的轉矩。因此,驅動器可能需要設計也可能不需要按照電動機的完整規格進行設計。
您可以使用通常在電機數據表中給出的速度常數和轉矩常數來估算特定應用所需的電壓和電流。驅動器必須使用至少與從電動機上獲得所需速度所需的電壓一樣高的電壓供電,但是電源電壓通常取決于系統可用的電壓。通常,最大電流需求由使用機械負載啟動電動機所需的轉矩來設置。
選擇MOSFET
確保選擇額定功率至少為電源電壓和電機所需最大電流的功率MOSFET。請記住,有必要留一些余量。
選擇一個漏極至源極額定電壓(VDS)至少比電源電壓高20%的MOSFET。在某些情況下,尤其是在電流較大,轉矩步長較大且電源控制不佳的系統中,您可能需要的裕度是電源電壓的兩倍。
當然,MOSFET的額定電流必須足夠高,以提供電動機所需的峰值電流,但通常在散熱方面占主導地位。MOSFET會耗散功率并在漏極-源極電阻RDS(ON)中產生熱量。包括環境溫度和MOSFET可用的任何散熱在內的熱約束設定了可以消耗多少功率的限制。該最大允許功耗驅動基于RDS(ON)值的MOSFET選擇。
一旦找到必要的額定電壓和RDS(ON),請務必考慮總柵極電荷(QG)。柵極電荷是衡量打開和關閉MOSFET需要多少電荷的度量。QG較低的MOSFET更易于驅動。與較低的QG相比,它在較低的柵極驅動電流下切換速度更快。
柵極驅動電流和上升/下降時間
可以將功率MOSFET的柵極視為柵極和源極端子之間的非線性電容。即使柵極不傳導直流電流,它也確實需要電流來對柵極電容進行充電和放電,從而導通和關斷MOSFET。提供給柵極的電流量決定了完全導通MOSFET所花費的時間。同樣,當電流從柵極拉出時,該電流量將設置MOSFET的關斷時間。
要了解驅動柵極所需的條件,您需要知道MOSFET的開關速度。您必須在低開關損耗(需要快速的上升和下降時間)和低EMI(需要緩慢的上升和下降時間)之間進行設計權衡。此外,脈寬調制(PWM)頻率以及所需的最小和最大占空比限制了開關速度的時間。例如,在20 kHz PWM頻率下,占空比為1%時需要產生500 ns的脈沖。這需要數百納秒或更短的上升和下降時間。
確定所需的上升/下降時間后,計算所需的柵極驅動電流。可以估計為QG/t,其中QG是總柵極電荷,t是所需的上升/下降時間。請注意,這是在整個上升/下降時間內需要驅動的電流量-實際上,由于大多數柵極驅動器不提供恒定電流,因此柵極驅動電流通常會在這段時間內有所變化。
如果將恒定電流輸送到柵極,則柵極處的電壓不是線性斜率,而是線性斜率。在MOSFET切換期間,它達到一個平穩狀態(圖1)。這被稱為“米勒高原”,是由柵極-漏極電容引起的。當漏極過渡時,此電容需要電流充電,因此柵極-源極電容的充電會變慢。提供給柵極充電的電流越低,轉換完成所需的時間就越長。
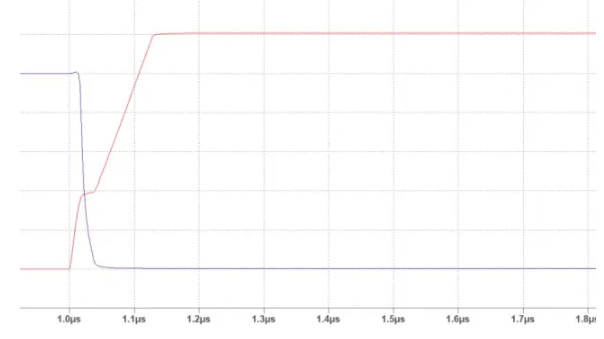
圖1:1A恒流柵極驅動器(100 nC –紅色=柵極,紫色=漏極,200ns / div。)
圖2顯示了使用具有12Ω串聯電阻的12 V恒壓柵極驅動器時的波形。高原仍然存在,柵極達到12 V所需的時間更長,但漏極的開關時間幾乎相同。
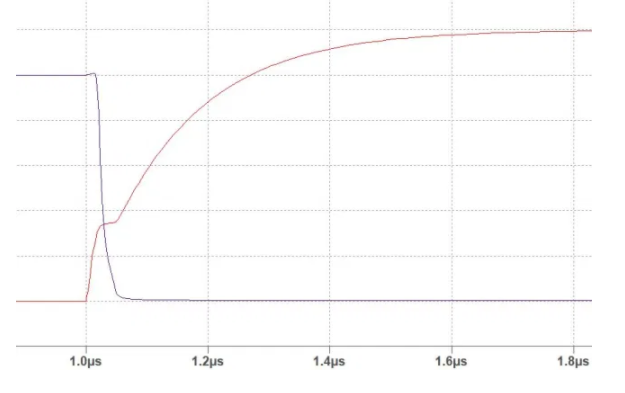
圖2:具有12串聯電阻的12V柵極驅動器(100 nC –紅色=柵極,紫色=漏極,200ns / div。)
選擇前置驅動器IC
一旦知道所需的最小柵極驅動電流,就選擇可以支持它的柵極驅動器(預驅動器)IC。這些零件的種類繁多,具有不同數量的通道,柵極驅動電流功能和電源電壓范圍。某些部分還提供其他集成功能,例如電流檢測放大器和保護電路。
許多半導體供應商都提供預驅動器IC,這些供應商生產用于電源管理的產品,包括MPS。這些供應商提供了專為DC電動機驅動器設計的各種單通道和三通道預驅動器IC,包括三通道60V和100V系列以及單相100V器件。
一些預驅動器IC使用線性穩壓器,電荷泵和/或自舉電容器從主電動機電源內部生成所需的柵極驅動電壓。其他一些則需要單獨的柵極驅動電源。要以100%的占空比工作(長時間輸出高電平),請選擇帶有內部電荷泵的預驅動器,以使高端柵極長時間保持導通狀態。僅依靠自舉電路驅動高端的預驅動器只能在有限的時間內保持高端MOSFET的導通,因為一段時間后漏電流會耗盡自舉電容。
柵極驅動器必須至少能夠提供實現上述所需的上升和下降時間所需的電流量,但是也可以使用具有更大電流能力的驅動器。一些驅動器IC提供了一種通過改變零件內部柵極驅動的數量來調節上升和下降時間(也稱為“轉換速率調節”)的方法。當使用不具有內置壓擺率調節功能的部件時,用戶可以在柵極驅動器輸出和MOSFET柵極之間插入電阻。這限制了柵極電流,并減慢了上升和下降時間。
編輯:hfy
-
MOSFET
+關注
關注
146文章
7101瀏覽量
212777 -
驅動器IC
+關注
關注
0文章
41瀏覽量
14680 -
無刷電動機
+關注
關注
1文章
19瀏覽量
8659 -
柵極驅動器
+關注
關注
8文章
732瀏覽量
38959
發布評論請先 登錄
相關推薦

pcie設備驅動程序安裝步驟
硬盤電機怎么驅動程序?它有什么典型特征?
Linux設備驅動程序分類有哪些
linux驅動程序如何加載進內核
linux驅動程序主要有哪些功能
linux驅動程序的編譯方法是什么
linux驅動程序運行在什么空間
plc可以進行運動控制嗎
實現機器人操作系統——ADI Trinamic電機控制器ROS1驅動程序簡介

怎么編寫Framebuffer驅動程序






 工商網監
工商網監
評論