 霍爾效應集成電路雙極性開關的基本原理和操作
霍爾效應集成電路雙極性開關的基本原理和操作
本文是一份應用筆記,討論了雙極性開關的基本原理和操作,包括鎖存模式特性和負單極性或負開關模式特性。本文檔還介紹了使用雙極性開關時必需的設計組件以及如何計算功耗。
雙極型傳感器IC設計為敏感開關。(請注意,術語“雙極”是指磁極性,與雙極半導體芯片結構無關。)雙極開關具有一致的磁滯,但是各個單元的開關點出現在相對更正或更負的范圍內。這些設備的應用場合是使用緊密間隔的北極和南極,從而使所需的磁信號幅度ΔB最小,這是因為磁場極性的交替可確保切換,而一致的磁滯可確保周期性。
圖1顯示了用于檢測旋轉軸位置的應用,例如在無刷直流電動機(BLDC)中。將多個磁體合并到稱為“環形磁體”的簡單結構中,該結構包含相對的交替區域磁極性。與每個環形磁體相鄰的IC封裝是霍爾雙極開關器件。當軸旋轉時,磁性區域將移過霍爾設備。該設備受到最近的磁場作用,并且在南磁場相反時打開,而在北磁場相反時關閉。請注意,設備的商標面朝向環形磁鐵。
使用環形磁體的兩種雙極設備應用。環形磁鐵具有交替的N(北)和S(南)極性區域,它們旋轉經過霍爾器件,從而打開和關閉。
典型操作
雙極型開關通常具有正的BOP和負的BRP,但是這些開關點出現在相對于中性水平B = 0 G并不精確對稱的場強水平。比閂鎖開關(雙極開關最初被認為是早期閂鎖的低成本替代品)。一小部分(≈10%)雙極開關的開關點范圍完全在正極(南)極性范圍內,或者完全在負極(北)極性范圍內。使用交變的正(南)極性和負(北)極性字段,可以可靠地操作所有這些特性范圍。斷開磁場通常會在磁場消失時發生,但是為了確保釋放磁場,需要反向磁場。
雙極開關的示例是具有最大工作點BOP(max)為45 G,最小釋放點BRP(min)為–40 G,最小滯后值為BHYS(min)的設備, 15G。但是,最小工作點BOP(min)可能低至–25 G,最大釋放點BRP(max)可能高達30G。圖2顯示了這些特性具有這些切換點的虛擬設備的單位。在圖3的頂部,跡線“ MinimumΔB”展示了幅值可以導致可靠切換的幅度有多小。
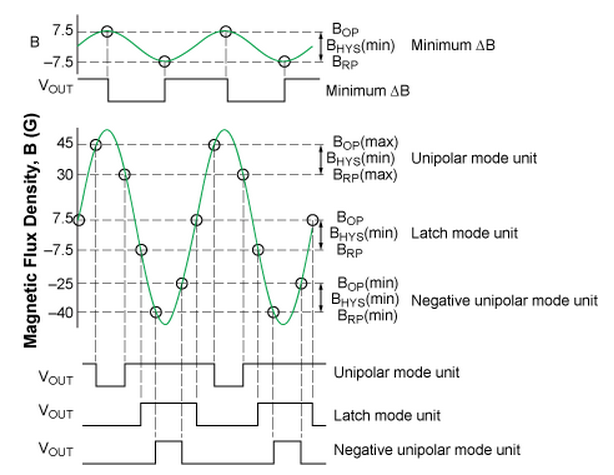
演示雙極性開關的可能開關點范圍,用于低磁通量振幅,窄間距交流電極目標
圖2說明了雙極開關的三種一般工作模式之間的差異:
“閂鎖模式”描述了具有正BOP和負BRP的任何雙極開關單元,其行為類似于霍爾閂鎖開關,因為需要同時存在兩個磁場才能完成操作(但沒有實際鎖定設備狀態)
“單極模式”描述了BOP和BRP都在正(南)范圍內的任何雙極開關單元
“負單極模式”(有時稱為“負開關”模式)描述了BOP和BRP都在負(北)范圍內的任何雙極開關單元
編輯:hfy
-
傳感器IC
+關注
關注
0文章
23瀏覽量
12804 -
無刷直流電動機
+關注
關注
1文章
53瀏覽量
13918
發布評論請先 登錄
相關推薦
SS30AT 雙極霍爾效應傳感器集成電路
全極雙輸出極性檢測霍爾開關傳感器 雙通道霍爾開關DH482
半導體集成電路電壓比較器測試方法的基本原理 GB/T 679
pwm雙極性調制電路圖_單極性與雙極性PWM模式介紹
模擬集成電路的分析與設計,模擬集成電路的基本原理和概念是是什么?
霍爾效應如何發揮作用?





 工商網監
工商網監
評論