 鴻蒙內核分析:線程中斷環境下的任務切換
鴻蒙內核分析:線程中斷環境下的任務切換
關于中斷部分系列篇將用兩篇詳細說明整個過程.
中斷切換篇用自下而上的方式,從匯編開始處往上跟蹤.說清楚保存和恢復TaskIrqContext,以及調用HalIrqHandler的入口,此為中斷切換篇.
中斷管理篇用自上而下的方式,從C語言中斷注冊管理開始往下跟蹤,一直到匯編調用的4個HalIrqHandlerOsTaskProcSignalOsSchedPreemptOsSaveSignalContextIrqC函數為止.
中斷環境下的任務切換
在鴻蒙的內核線程就是任務,系列篇中說的任務和線程當一個東西去理解.
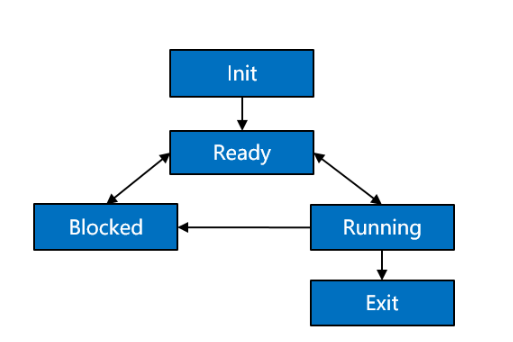
一般二種場景下需要切換任務上下文:
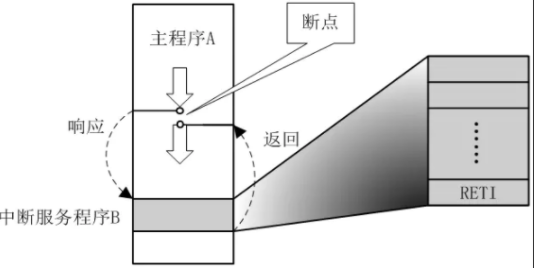
在中斷環境下,從當前線程切換到目標線程,這種方式也稱為硬切換.不由軟件控制的被動式切換.哪些情況下會出現硬切換呢?
由硬件產生的中斷,比如 鼠標,鍵盤外部設備每次點擊和敲打,屏幕的觸摸,USB的插拔等等這些都是硬中斷.同樣的需要切換棧運行,需要復用寄存器,但與軟切換不一樣的是,硬切換會切換工作模式(中斷模式).所以會更復雜點,但道理還是一樣要保存和恢復切換現場寄存器的值, 而保存寄存器順序的結構體叫:任務中斷上下文(TaskIrqContext).
在線程環境下,從當前線程切換到目標線程,這種方式也稱為軟切換,能由軟件控制的自主式切換.哪些情況下會出現軟切換呢?
運行的線程申請某種資源(比如各種鎖,讀/寫消息隊列)失敗時,需要主動釋放CPU的控制權,將自己掛入等待隊列,調度算法重新調度新任務運行.
每隔10ms就執行一次的OsTickHandler節拍處理函數,檢測到任務的時間片用完了,就發起任務的重新調度,切換到新任務運行.
不管是內核態的任務還是用戶態的任務,于切換而言是統一處理,一視同仁的,因為切換是需要換棧運行,寄存器有限,需要頻繁的復用,這就需要將當前寄存器值先保存到任務自己的棧中,以便別人用完了輪到自己再用時恢復寄存器當時的值,確保老任務還能繼續跑下去. 而保存寄存器順序的結構體叫:任務上下文(TaskContext).
本篇說清楚在中斷環境下切換(硬切換)的實現過程.線程切換(軟切換)實現過程已在鴻蒙內核源碼分析(總目錄)任務切換篇中詳細說明.
ARM的七種工作模式中,有兩個是和中斷相關.
普通中斷模式(irq):一般中斷模式也叫普通中斷模式,用于處理一般的中斷請求,通常在硬件產生中斷信號之后自動進入該模式,該模式可以自由訪問系統硬件資源。
快速中斷模式(fiq):快速中斷模式是相對一般中斷模式而言的,用來處理高優先級中斷的模式,處理對時間要求比較緊急的中斷請求,主要用于高速數據傳輸及通道處理中。
此處分析普通中斷模式下的任務切換過程.
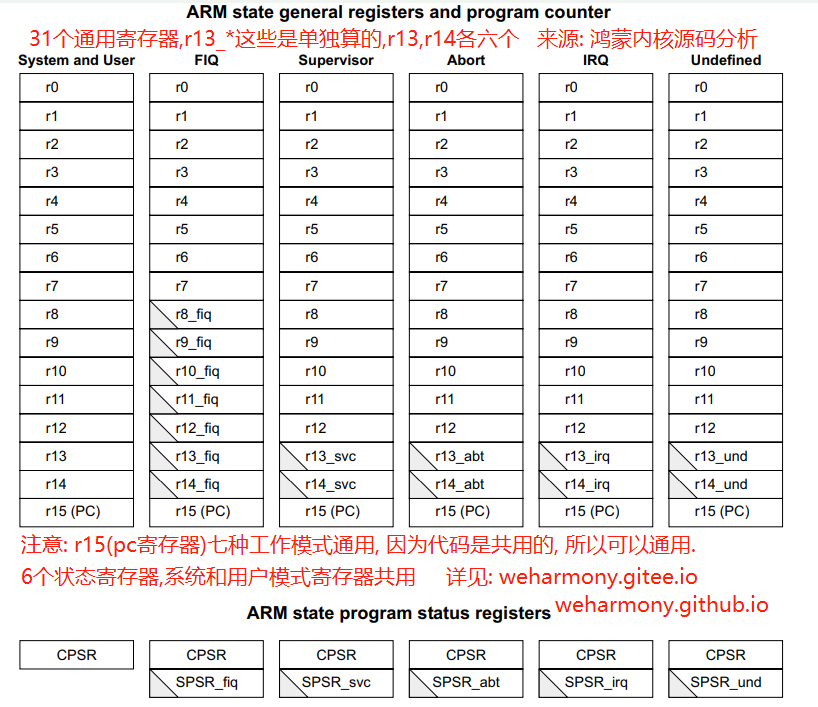
普通中斷模式相關寄存器
這張圖一定要刻在腦海里,系列篇會多次拿出來,目的是為了能牢記它.
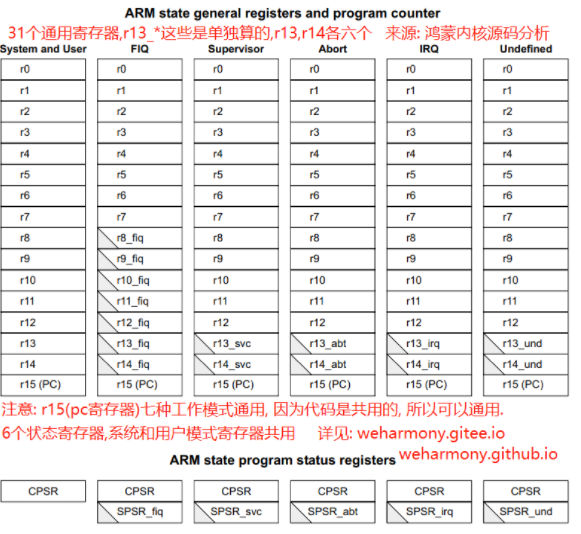
普通中斷模式(圖中IRQ列)是一種異常模式,有自己獨立運行的棧空間.一個(IRQ)中斷發生后,硬件會將CPSR寄存器工作模式位置為IRQ模式.并跳轉到入口地址OsIrqHandler執行.
#define OS_EXC_IRQ_STACK_SIZE 64 //64個字節, 16個棧空間
__irq_stack:
.space OS_EXC_IRQ_STACK_SIZE * CORE_NUM
__irq_stack_top:
OsIrqHandler匯編代碼實現過程,就干了三件事:
1.保存任務中斷上下文TaskIrqContext
2.執行中斷處理程序HalIrqHandler,這是個C函數,由匯編調用.
3.恢復任務中斷上下文TaskIrqContext,返回被中斷的任務繼續執行
TaskIrqContext 和 TaskContext
先看本篇結構體TaskIrqContext
#define TASK_IRQ_CONTEXT \
unsigned int R0; \
unsigned int R1; \
unsigned int R2; \
unsigned int R3; \
unsigned int R12; \
unsigned int USP; \
unsigned int ULR; \
unsigned int CPSR; \
unsigned int PC;
typedef struct {//任務中斷上下文
#if !defined(LOSCFG_ARCH_FPU_DISABLE)
UINT64 D[FP_REGS_NUM]; /* D0-D31 */
UINT32 regFPSCR; /* FPSCR */
UINT32 regFPEXC; /* FPEXC */
#endif
UINT32 resved;
TASK_IRQ_CONTEXT
} TaskIrqContext;
typedef struct {//任務上下文,已在任務切換篇中詳細說明,放在此處是為了對比
#if !defined(LOSCFG_ARCH_FPU_DISABLE)
UINT64 D[FP_REGS_NUM]; /* D0-D31 */
UINT32 regFPSCR; /* FPSCR */
UINT32 regFPEXC; /* FPEXC */
#endif
UINT32 resved; /* It's stack 8 aligned */
UINT32 regPSR;
UINT32 R[GEN_REGS_NUM]; /* R0-R12 */
UINT32 SP; /* R13 */
UINT32 LR; /* R14 */
UINT32 PC; /* R15 */
} TaskContext;
兩個結構體很簡單,目的更簡單,就是用來保存寄存器現場的值的.TaskContext把17個寄存器全部保存了,TaskIrqContext保存的少些,在棧中沒有保存R4-R11寄存器的值,這說明在整個中斷處理過程中,都不會用到R4-R11寄存器.不會用到就不會改變,當然就沒必要保存了.這也說明內核開發者的嚴謹程度,不造成時間和空間上的一丁點浪費.效率的提升是從細節處入手的,每個小地方優化那么一丟丟,整體性能就上來了.
TaskIrqContext中有兩個變量有點奇怪unsigned int USP;unsigned int ULR;指的是用戶模式下的SP和LR值, 這個要怎么理解? 因為對一個運行著的任務而言,中斷的到來是不顆不定時炸彈,無法預知,也無法準備,中斷一來它立即被打斷,根本沒有時間去保存現場到自己的棧中,那只能是保存在IRQ棧或者SVC棧中.而IRQ棧非常的小,只有64個字節,16個棧空間,指望不上了,就保存在SVC棧中,SVC模式棧可是有 8K空間的.
從接下來的OsIrqHandler代碼中可以看出,鴻蒙內核整個中斷的工作其實都是在SVC模式下完成的,而irq的棧只是個過渡棧. 具體看匯編代碼一行一行分析.
普通中斷處理程序
OsIrqHandler: @硬中斷處理,此時已切換到硬中斷棧
SUB LR, LR, #4 @記錄譯碼指令地址,以防切換過程丟失指令
/* push r0-r3 to irq stack */ @irq棧只是個過渡棧
STMFD SP, {R0-R3} @r0-r3寄存器入 irq 棧
SUB R0, SP, #(4 * 4)@r0 = sp - 16,目的是記錄{R0-R3}4個寄存器保存的開始位置,屆時從R3開始出棧
MRS R1, SPSR @獲取程序狀態控制寄存器
MOV R2, LR @r2=lr
/* disable irq, switch to svc mode */@超級用戶模式(SVC 模式),主要用于 SWI(軟件中斷)和 OS(操作系統)。
CPSID i, #0x13 @切換到SVC模式,此處一切換,后續指令將在SVC棧運行
@CPSID i為關中斷指令,對應的是CPSIE
@TaskIrqContext 開始保存中斷現場 ......
/* push spsr and pc in svc stack */
STMFD SP!, {R1, R2} @實際是將 SPSR,和PC入棧對應TaskIrqContext.PC,TaskIrqContext.CPSR,
STMFD SP, {LR} @LR再入棧,SP不自增,如果是用戶模式,LR值將被 282行:STMFD SP, {R13, R14}^覆蓋
@如果非用戶模式,將被 286行:SUB SP, SP, #(2 * 4) 跳過.
AND R3, R1, #CPSR_MASK_MODE @獲取CPU的運行模式
CMP R3, #CPSR_USER_MODE @中斷是否發生在用戶模式
BNE OsIrqFromKernel @非用戶模式不用將USP,ULR保存在TaskIrqContext
/* push user sp, lr in svc stack */
STMFD SP, {R13, R14}^ @將用戶模式的sp和LR入svc棧
OsIrqFromKernel: @從內核發起中斷
/* from svc not need save sp and lr */@svc模式下發生的中斷不需要保存sp和lr寄存器值
SUB SP, SP, #(2 * 4) @目的是為了留白給 TaskIrqContext.USP,TaskIrqContext.ULR
@TaskIrqContext.ULR已經在 276行保存了,276行用的是SP而不是SP!,所以此處要跳2個空間
/* pop r0-r3 from irq stack*/
LDMFD R0, {R0-R3} @從R0位置依次出棧
/* push caller saved regs as trashed regs in svc stack */
STMFD SP!, {R0-R3, R12} @寄存器入棧,對應 TaskIrqContext.R0~R3,R12
/* 8 bytes stack align */
SUB SP, SP, #4 @棧對齊 對應TaskIrqContext.resved
/*
* save fpu regs in case in case those been
* altered in interrupt handlers.
*/
PUSH_FPU_REGS R0 @保存fpu regs,以防中斷處理程序中的fpu regs被修改。
@TaskIrqContext 結束保存中斷現場......
@開始執行真正的中斷處理函數了.
#ifdef LOSCFG_IRQ_USE_STANDALONE_STACK @是否使用了獨立的IRQ棧
PUSH {R4} @R4先入棧保存,接下來要切換棧,需保存現場
MOV R4, SP @R4=SP
EXC_SP_SET __svc_stack_top, OS_EXC_SVC_STACK_SIZE, R1, R2 @切換到svc棧
#endif
/*BLX 帶鏈接和狀態切換的跳轉*/
BLX HalIrqHandler /* 調用硬中斷處理程序,無參 ,說明HalIrqHandler在svc棧中執行 */
#ifdef LOSCFG_IRQ_USE_STANDALONE_STACK @是否使用了獨立的IRQ棧
MOV SP, R4 @恢復現場,sp = R4
POP {R4} @彈出R4
#endif
/* process pending signals */ @處理掛起信號
BL OsTaskProcSignal @跳轉至C代碼
/* check if needs to schedule */@檢查是否需要調度
CMP R0, #0 @是否需要調度,R0為參數保存值
BLNE OsSchedPreempt @不相等,即R0非0,一般是 1
MOV R0,SP @參數
MOV R1,R7 @參數
BL OsSaveSignalContextIrq @跳轉至C代碼
/* restore fpu regs */
POP_FPU_REGS R0 @恢復fpu寄存器值
ADD SP, SP, #4 @sp = sp + 4
OsIrqContextRestore: @恢復硬中斷環境
LDR R0, [SP, #(4 * 7)] @R0 = sp + 7,目的是跳到恢復中斷現場TaskIrqContext.CPSR位置,剛好是TaskIrqContext倒數第7的位置.
MSR SPSR_cxsf, R0 @恢復spsr 即:spsr = TaskIrqContext.CPSR
AND R0, R0, #CPSR_MASK_MODE @掩碼找出當前工作模式
CMP R0, #CPSR_USER_MODE @是否為用戶模式?
@TaskIrqContext 開始恢復中斷現場 ......
LDMFD SP!, {R0-R3, R12} @從SP位置依次出棧 對應 TaskIrqContext.R0~R3,R12
@此時已經恢復了5個寄存器,接來下是TaskIrqContext.USP,TaskIrqContext.ULR
BNE OsIrqContextRestoreToKernel @看非用戶模式,怎么恢復中斷現場.
/* load user sp and lr, and jump cpsr */
LDMFD SP, {R13, R14}^ @出棧,恢復用戶模式sp和lr值 即:TaskIrqContext.USP,TaskIrqContext.ULR
ADD SP, SP, #(3 * 4) @跳3個位置,跳過 CPSR ,因為上一句不是 SP!,所以跳3個位置,剛好到了保存TaskIrqContext.PC的位置
/* return to user mode */
LDMFD SP!, {PC}^ @回到用戶模式,整個中斷過程完成
@TaskIrqContext 結束恢復中斷現場(用戶模式下) ......
OsIrqContextRestoreToKernel:@從內核恢復中斷
/* svc mode not load sp */
ADD SP, SP, #4 @其實是跳過TaskIrqContext.USP,因為在內核模式下并沒有保存這個值,翻看 287行
LDMFD SP!, {LR} @彈出LR
/* jump cpsr and return to svc mode */
ADD SP, SP, #4 @跳過cpsr
LDMFD SP!, {PC}^ @回到svc模式,整個中斷過程完成
@TaskIrqContext 結束恢復中斷現場(內核模式下) ......
逐句解讀
跳轉到OsIrqFromKernel硬件會自動切換到__irq_stack執行
1句:SUB LR, LR, #4在arm執行過程中一般分為取指,譯碼,執行階段,而PC是指向取指,正在執行的指令為 PC-8 ,譯碼指令為PC-4.當中斷發生時硬件自動執行 mov lr pc, 中間的PC-4譯碼指令因為沒有寄存器去記錄它,就會被丟失掉.所以SUB LR, LR, #4的結果是lr = PC -4 ,定位到了被中斷時譯碼指令,將在棧中保存這個位置,確保回來后能繼續執行.
2句:STMFD SP, {R0-R3}當前4個寄存器入__irq_stack保存
3句:SUB R0, SP, #(4 * 4)因為SP沒有自增,R0跳到保存R0內容地址
4,5句:讀取SPSR,LR寄存器內容,目的是為了后面在SVC棧中保存TaskIrqContext
6句:CPSID i, #0x13禁止中斷和切換SVC模式,執行完這條指令后工作模式將切到 SVC模式
@TaskIrqContext 開始保存中斷現場 ......
中間代碼需配合TaskIrqContext來看,不然100%懵逼.結合看就秒懂,代碼都已經注釋,不再做解釋,注解中提到的 翻看276行 是指源碼的第276行,請對照注解源碼看理解會更透徹.進入源碼注解地址查看
@TaskIrqContext 結束保存中斷現場 ......
TaskIrqContext保存完現場后就真正的開始處理中斷了,
/*BLX 帶鏈接和狀態切換的跳轉*/
BLX HalIrqHandler /* 調用硬中斷處理程序,無參 ,說明HalIrqHandler在svc棧中執行 */
#ifdef LOSCFG_IRQ_USE_STANDALONE_STACK @是否使用了獨立的IRQ棧
MOV SP, R4 @恢復現場,sp = R4
POP {R4} @彈出R4
#endif
/* process pending signals */ @處理掛起信號
BL OsTaskProcSignal @跳轉至C代碼
/* check if needs to schedule */@檢查是否需要調度
CMP R0, #0 @是否需要調度,R0為參數保存值
BLNE OsSchedPreempt @不相等,即R0非0,一般是 1
MOV R0,SP @參數
MOV R1,R7 @參數
BL OsSaveSignalContextIrq @跳轉至C代碼
/* restore fpu regs */
POP_FPU_REGS R0 @恢復fpu寄存器值
ADD SP, SP, #4 @sp = sp + 4
這段代碼都是跳轉到C語言去執行,分別是HalIrqHandlerOsTaskProcSignalOsSchedPreemptOsSaveSignalContextIrqC語言部分內容很多,將在中斷管理篇中說明.
@TaskIrqContext 開始恢復中斷現場 ......
同樣的中間代碼需配合TaskIrqContext來看,不然100%懵逼.結合看就秒懂,代碼都已經注釋,不再做解釋,注解中提到的 翻看287行 是指源碼的第287行,請對照注解源碼看理解會更透徹.進入源碼注解地址查看
@TaskIrqContext 結束恢復中斷現場 ......
編輯:hfy
-
ARM
+關注
關注
134文章
9057瀏覽量
366882 -
寄存器
+關注
關注
31文章
5325瀏覽量
120054 -
SVC
+關注
關注
0文章
33瀏覽量
12115 -
線程
+關注
關注
0文章
504瀏覽量
19653 -
鴻蒙系統
+關注
關注
183文章
2634瀏覽量
66226
發布評論請先 登錄
相關推薦
鴻蒙內核源碼Task/線程技術分析
【HarmonyOS】鴻蒙內核源碼分析(調度機制篇)
鴻蒙內核源碼分析(調度機制篇):Task是如何被調度執行的
鴻蒙內核源碼分析(Task管理篇):task是內核調度的單元
鴻蒙內核源碼分析(Task管理篇):task是內核調度的單元
RTThread內核線程是如何切換的
鴻蒙內核源碼分析之線程環境下的任務切換

鴻蒙內核源碼分析:引起中斷的事件或原因
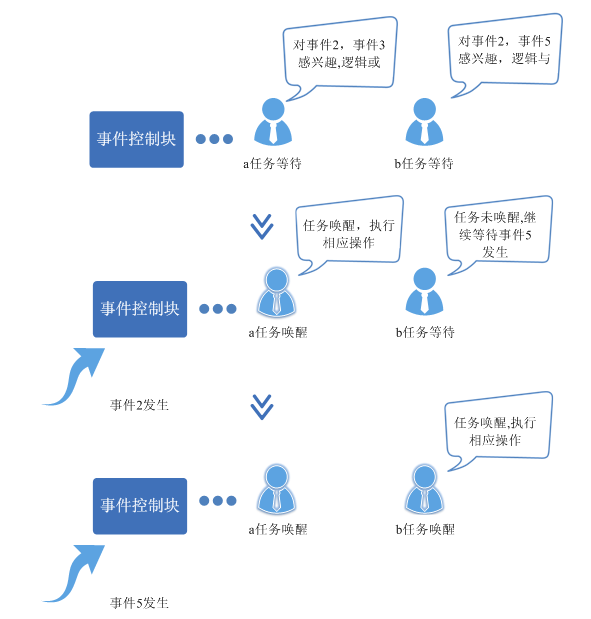
鴻蒙內核源碼分析多任務環境下的事件控制塊
鴻蒙內核源碼分析:task是內核調度的單元

鴻蒙內核源碼分析:進程和Task的就緒隊列對調度的作用






 工商網監
工商網監
評論