") 基于工控機(jī)和Lab Windows/CVI工具實(shí)現(xiàn)靜模系統(tǒng)的軟硬件設(shè)計(jì)
基于工控機(jī)和Lab Windows/CVI工具實(shí)現(xiàn)靜模系統(tǒng)的軟硬件設(shè)計(jì)
作者:王新超,潘貞存,高厚磊
電力系統(tǒng)靜態(tài)模擬簡稱靜模,是根據(jù)相似性原理建立的一種物理模擬。它利用線路等值阻抗模擬實(shí)際線路,用等值電源替代發(fā)電機(jī)構(gòu)成模擬系統(tǒng),可以模擬除系統(tǒng)振蕩和發(fā)電機(jī)電磁暫態(tài)過程以外的各種運(yùn)行狀態(tài),包括正常狀態(tài)和事故狀態(tài),從而可以對(duì)繼電保護(hù)和自動(dòng)裝置動(dòng)作的可靠性進(jìn)行實(shí)驗(yàn),是教學(xué)、科研、保護(hù)設(shè)備整定校驗(yàn)的得力助手。
當(dāng)前計(jì)算機(jī)監(jiān)控技術(shù)在電力系統(tǒng)中得到了廣泛的應(yīng)用,并成為靜模技術(shù)發(fā)展的一個(gè)重要方向。靜模系統(tǒng)的數(shù)據(jù)可以由計(jì)算機(jī)數(shù)據(jù)采集系統(tǒng)得到,并通過計(jì)算機(jī)實(shí)時(shí)處理,而故障的設(shè)置及開關(guān)操作等經(jīng)常性的工作可采用計(jì)算機(jī)進(jìn)行控制。這就進(jìn)一步提高了靜模系統(tǒng)的靈活性和自動(dòng)化水平。
1 靜模系統(tǒng)的構(gòu)成及基本功能
靜模系統(tǒng)主要由三大部分構(gòu)成,即一次模擬系統(tǒng)、智能化監(jiān)控系統(tǒng)和繼電保護(hù)裝置,其結(jié)構(gòu)見圖1。
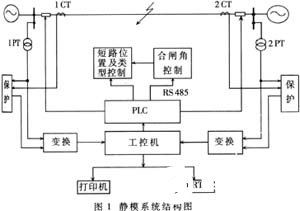
一次模擬系統(tǒng)主要由雙側(cè)電源、模擬線路、斷路器、PT(電壓互感器)、CT(電流互感器)和控制回路等部分組成,完成一次系統(tǒng)的模擬和手動(dòng)控制功能。
智能化監(jiān)控系統(tǒng)主要由模擬量采集模塊、開關(guān)量采集模塊、586工業(yè)控制計(jì)算機(jī)、可編程邏輯控制器(PLC)、執(zhí)行繼電器箱和打印機(jī)等部分組成。主要完成以下功能:
(1)采集和處理模擬線路兩端電壓、電流等模擬量;
(2)模擬線路主接線和運(yùn)行參數(shù)的定時(shí)顯示及故障數(shù)據(jù)的存儲(chǔ)和分析;
(3)監(jiān)視兩側(cè)斷路器位置及各開關(guān)量位置,監(jiān)視保護(hù)動(dòng)作出口的狀態(tài);
(4)線路兩側(cè)斷路器的跳、合閘控制;
(5)在模擬線路的11個(gè)短路模擬點(diǎn)上,選定任意一個(gè)短路模擬點(diǎn),設(shè)置故障類型、合閘角及故障時(shí)間;
(6)控制短路開關(guān)(DLABC)的關(guān)斷。
繼電保護(hù)裝置為微機(jī)實(shí)現(xiàn)的數(shù)字式超高壓線路成套快速保護(hù)裝置。由于裝置以短路開關(guān)替代機(jī)電開關(guān)制造短路,所以對(duì)于兩相以上的并發(fā)短路故障的同時(shí)性,有了更為精確的實(shí)現(xiàn),其短路角度的任意設(shè)置,更為裝置的應(yīng)用提供了寬松的條件。
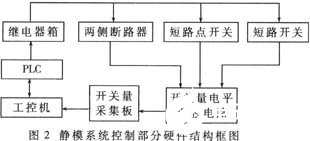
2 靜模系統(tǒng)控制部分的硬件組成
靜模系統(tǒng)計(jì)算機(jī)控制部分實(shí)現(xiàn)簡單故障的設(shè)置、兩側(cè)斷路器的開關(guān)操作和各種開關(guān)量的采集及顯示等功能。靜模系統(tǒng)控制部分硬件結(jié)構(gòu)框圖如圖2所示。
2.1 工控機(jī)
工控機(jī)采用研華公司生產(chǎn)的PRETRUMII工業(yè)控制機(jī)。
2.2 可編程邏輯控制器
可編程邏輯控制器采用OMRON新一代產(chǎn)品CQM1,它比較適合于小規(guī)模機(jī)器控制,可實(shí)現(xiàn)高速輸入輸出應(yīng)答,包括中斷輸入處理、間隔時(shí)間中斷處理,內(nèi)部高速計(jì)數(shù)器可實(shí)現(xiàn)精確定時(shí)、計(jì)數(shù)以及頻率變換等復(fù)雜功能。其網(wǎng)絡(luò)聯(lián)接有標(biāo)準(zhǔn)RS232、RS485端口與計(jì)算機(jī)連接,實(shí)現(xiàn)與計(jì)算機(jī)的信息交換。
在本裝置中,工控機(jī)的控制命令通過RS-232C串口,按照約定好的通訊協(xié)議,以串行通訊的方式傳送給可編程邏輯控制器(PLC),利用PLC具有邏輯控制、時(shí)序控制、計(jì)時(shí)控制的特點(diǎn),將這一命令轉(zhuǎn)變成可具體實(shí)現(xiàn)的時(shí)序控制命令,控制相應(yīng)的接觸器和智能合閘角控制電路,從而完成故障設(shè)置或開關(guān)操作任務(wù)。
2.3 開關(guān)量采集板
開關(guān)量采集板PC-DIO-24/Pnp是一個(gè)24位并行數(shù)字輸入/輸出接口板,可對(duì)其進(jìn)行8位、16位或24位編程,它接于計(jì)算機(jī)ISA數(shù)據(jù)總線,具有即插即用功能。在本系統(tǒng)中開關(guān)量采集板的24位輸入/輸出數(shù)據(jù)位均置輸入狀態(tài)使用。
2.4智能合閘角控制裝置
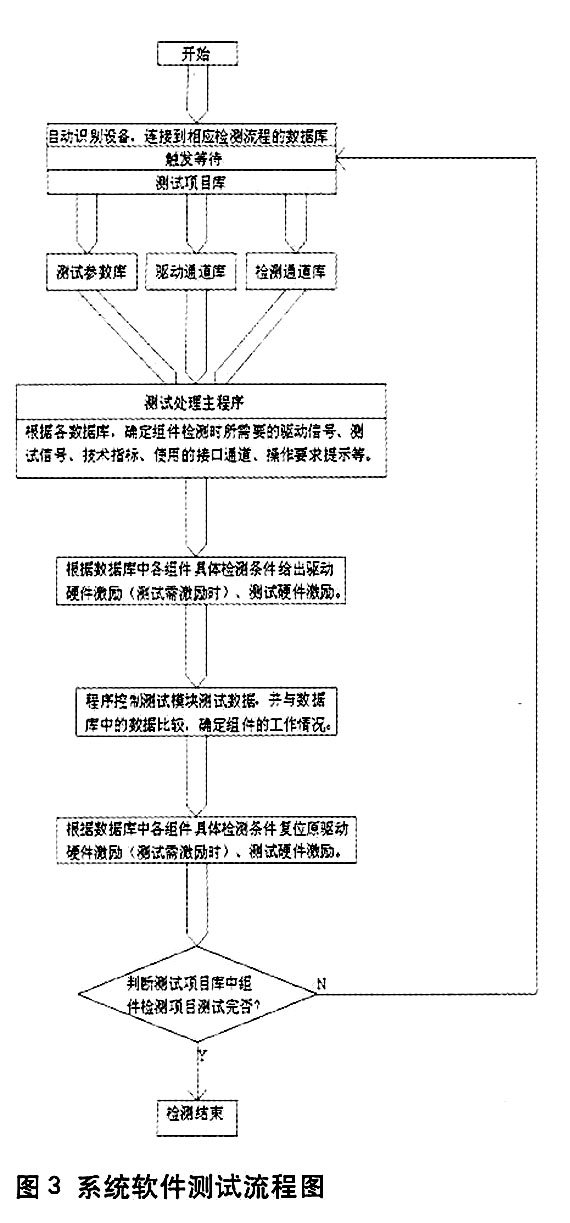
智能合閘角控制裝置由TK-51CUP板、電壓鑒相電路、RS485串行通信接口、手動(dòng)合閘角設(shè)置開關(guān)、光電隔離、觸發(fā)驅(qū)動(dòng)電路、雙向可控硅等7部分組成,如圖3所示。
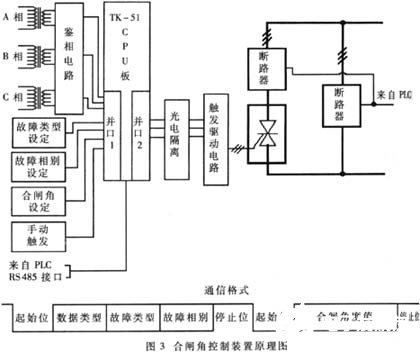
裝置的啟動(dòng)合閘方式,可由故障類型、故障相別、合閘角等參數(shù)決定。其中故障類型定義為單相、雙相、三相接地短路;故障相別分為A、B、C相。由于電壓鑒相采用3個(gè)獨(dú)立回路,因此可以方便地實(shí)現(xiàn)合閘角的A、B、C相基準(zhǔn)任意選擇。
合閘角設(shè)置定義了手動(dòng)與自動(dòng)兩種方式。手動(dòng)設(shè)置通過三段式十進(jìn)制撥碼開關(guān)實(shí)現(xiàn)“0~360度”的任意設(shè)定,又用兩個(gè)單段式十進(jìn)制撥碼開關(guān)分別實(shí)現(xiàn)故障類型、故障相別的選擇,通過手動(dòng)觸發(fā)按鈕可直接觸發(fā)雙向可控硅,制造短路故障。自動(dòng)設(shè)置由PLC通過RS485總線傳送故障類型、故障相別、合閘角以實(shí)現(xiàn)方式設(shè)置;傳送校驗(yàn)采取回送式,即CPU板將接收到的全部指令數(shù)據(jù)碼傳回PLC,以便由PLC決定是否重發(fā),如校驗(yàn)無誤,即發(fā)出觸發(fā)指令。手動(dòng)與自動(dòng)設(shè)置的切換采用點(diǎn)按“切換按鈕”切換至手動(dòng)設(shè)置,而用PLC對(duì)合閘角電路的每次命令刷新將設(shè)置切換到自動(dòng)狀態(tài)。
3 軟件系統(tǒng)
計(jì)算機(jī)控制系統(tǒng)的軟件系統(tǒng)是在Win98環(huán)境下,運(yùn)用Lab Windows/CVI工具軟件平臺(tái)開發(fā)的,全部程序用C語言編制而成。Lab Windows/CVI具有良好的圖形用戶界面開發(fā)工具,具有ANSI C編譯器和方便的調(diào)試環(huán)境。主程序框圖如圖4所示。
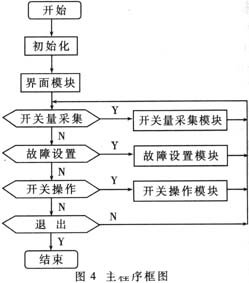
下面介紹各模塊的具體功能。
(1)初始化模塊:完成接口板的初始化、人機(jī)界面的初始化設(shè)置等功能;
(2)界面模塊:完成界面文件的編寫以及電氣主接線的繪制;
(3)開關(guān)量采集模塊:實(shí)現(xiàn)開關(guān)量的采集及顯示;
(4)故障設(shè)置模塊:實(shí)現(xiàn)在模擬線路上進(jìn)行任意一種簡單故障的設(shè)置;
(5)開關(guān)操作模塊:實(shí)現(xiàn)兩側(cè)模擬斷路器的開關(guān)操作。
4 系統(tǒng)操作
短路故障控制器軟件系統(tǒng)的主窗口如圖5所示。
它由模擬線路電氣主接線示意圖、短路母線接線示意圖、功能菜單、信息欄和通訊狀態(tài)幾部分組成。在主窗中,操作者可以通過鼠標(biāo)或鍵盤選擇其中任意一個(gè)功能選項(xiàng),并通過下拉菜單選擇該功能選項(xiàng)中的任意一個(gè)功能條。
(1)退出:用于退出系統(tǒng)主窗口,并返回到主控系統(tǒng)。
(2)故障設(shè)置:此功能選項(xiàng)用于在系統(tǒng)主窗口中顯示的模擬線路上進(jìn)行任意一種簡單故障的設(shè)置。其中,故障位置選擇參數(shù)用于操作者設(shè)置故障點(diǎn)。故障類型選擇參數(shù)用于選擇故障類型。故障時(shí)間選擇參數(shù)用于選擇故障持續(xù)時(shí)間。
(3)開關(guān)操作:用于實(shí)現(xiàn)對(duì)兩側(cè)模擬斷路器的跳合閘操作。操作者用鼠標(biāo)滾動(dòng)功能條,選擇任意功能選項(xiàng),用鼠標(biāo)單?quot;確定“,則開關(guān)操作設(shè)置窗口退出,彈出”密碼“窗口,確認(rèn)密碼后,一種開關(guān)操作便被設(shè)置完畢。
(4)還原:此功能選項(xiàng)用于恢復(fù)故障設(shè)置和開關(guān)操作。當(dāng)操作者完成一項(xiàng)故障設(shè)置或開關(guān)操作后,用鼠標(biāo)單擊”還原“,則系統(tǒng)恢復(fù)初始狀態(tài),等待進(jìn)行下一項(xiàng)故障設(shè)置或開關(guān)操作。
(5)幫助:內(nèi)含關(guān)于開關(guān)操作和故障設(shè)置的幫助信息。
(6)信息欄:用于顯示此次故障設(shè)置或開關(guān)操作的信息。
(7)通訊狀態(tài):用于顯示計(jì)算機(jī)與可編程邏輯控制器(PLC)之間的通訊狀態(tài)。若通訊狀態(tài)良好,則在通訊狀態(tài)欄中顯示”正確接收“;若通訊有誤,則在通訊狀態(tài)欄中顯示通訊錯(cuò)誤的種類。
另外,當(dāng)模擬線路上有開關(guān)變位時(shí),如完成了一次故障設(shè)置、開關(guān)操作或保護(hù)動(dòng)作跳閘后,在系統(tǒng)主窗口電氣主接線圖的相應(yīng)開關(guān)位置上將立即顯示出開關(guān)變位情況。
以上介紹了靜模系統(tǒng)控制部分的硬件、軟件組成和主要功能的設(shè)計(jì)與實(shí)現(xiàn)。硬件系統(tǒng)結(jié)構(gòu)簡單、軟件系統(tǒng)運(yùn)用 Lab Windows/CVI工具軟件開發(fā),具有良好的圖形用戶界面,操作簡單靈活,修改參數(shù)方便,對(duì)提高靜模系統(tǒng)的實(shí)驗(yàn)水平和教學(xué)效果有著十分重要的作用。文中提出的設(shè)計(jì)方案已于山東電力科學(xué)研究院靜態(tài)模擬實(shí)驗(yàn)室成功實(shí)現(xiàn),驗(yàn)證了其可行性和有效性。
責(zé)任編輯:gt
-
計(jì)算機(jī)
+關(guān)注
關(guān)注
19文章
7421瀏覽量
87718 -
工控機(jī)
+關(guān)注
關(guān)注
10文章
1684瀏覽量
50443 -
數(shù)據(jù)采集
+關(guān)注
關(guān)注
38文章
5906瀏覽量
113518
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
支持過程級(jí)動(dòng)態(tài)軟硬件劃分的RSoC設(shè)計(jì)與實(shí)現(xiàn)
怎么實(shí)現(xiàn)動(dòng)感系統(tǒng)的總體構(gòu)想及其軟硬件設(shè)計(jì)?
如何去實(shí)現(xiàn)RCC系統(tǒng)時(shí)鐘的軟硬件設(shè)計(jì)呢
嵌入式工控機(jī)在工業(yè)智造中的應(yīng)用是什么
基于Lab Windows/CVI的壓力測量控制系統(tǒng)的設(shè)計(jì)
單片機(jī)測控系統(tǒng)的軟硬件平臺(tái)技術(shù)
基于Lab Windows/CVI的激光聲遙感系統(tǒng)顯控軟件設(shè)
基于Lab Windows/CVI7.1綜合檢測系統(tǒng)
單片機(jī)系統(tǒng)軟硬件調(diào)試及維修技術(shù)
基于FPGA的軟硬件協(xié)同測試設(shè)計(jì)影響因素分析與設(shè)計(jì)實(shí)現(xiàn)
工控機(jī)的配置太低,能否從硬件上升級(jí)
工控機(jī)的技術(shù)要求 工控機(jī)的系統(tǒng)有哪些

嵌入式工控機(jī)與傳統(tǒng)工控機(jī)的區(qū)別
研華工控機(jī)用什么系統(tǒng)?Windows與Linux操作系統(tǒng)的較量





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論