") MEMS陀螺儀在自動(dòng)駕駛汽車中的應(yīng)用及發(fā)展
MEMS陀螺儀在自動(dòng)駕駛汽車中的應(yīng)用及發(fā)展
自動(dòng)駕駛汽車,機(jī)器人和工業(yè)設(shè)備的發(fā)展推動(dòng)了陀螺儀市場的升溫,這些設(shè)備都要求更高的精度和更小的體積。
多年來,陀螺儀一直用于導(dǎo)航任務(wù)。經(jīng)典的設(shè)計(jì)是機(jī)械陀螺儀,現(xiàn)在也有MEMS陀螺儀,一般高性能單元可能非常昂貴。
對于性能要求較低的應(yīng)用,比如手機(jī)、游戲機(jī)等,由于其體積小,成本低,微機(jī)電系統(tǒng)(MEMS)慣性測量單元(IMU)變得越來越流行。但是,需要這些MEMS器件的性能一直穩(wěn)步提高,從而使它們能夠扮演更重要的角色。目前,大部分MEMS陀螺儀仍需要其他傳感器融合應(yīng)用,檢驗(yàn)輸出的結(jié)果。
目前,學(xué)術(shù)界雖然出現(xiàn)了很多低漂移陀螺儀,而且各種陀螺儀架構(gòu)也很簡單,但是,這種技術(shù)仍沒有成功走近真實(shí)的商業(yè)市場。
對于自動(dòng)駕駛汽車來說,由加速度計(jì)和陀螺儀組成的IMU非常重要,能夠完成導(dǎo)航定位的任務(wù)。但價(jià)格較低的MEMS版本需要通過全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)信號(hào)以及來自攝像頭,雷達(dá)和激光雷達(dá)的其他輸入以及磁力計(jì)來進(jìn)行校正。盡管,近幾年隨著性能的提高,一些產(chǎn)品只需要很少的校正。不過,它們不太可能很快就能夠完全滿足關(guān)鍵應(yīng)用的需求。
IMU
IMU通過跟蹤線性和旋轉(zhuǎn)慣量的變化來測量運(yùn)動(dòng)。它們至少由兩種不同類型的傳感器,加速度計(jì)和陀螺儀組成。這些傳感器可以使用傳統(tǒng)的宏尺度技術(shù)來構(gòu)建,也可以通過使用MEMS技術(shù)來構(gòu)建。
加速度計(jì)可通過感應(yīng)線性加速度來測量線性運(yùn)動(dòng)。陀螺儀(或簡稱為陀螺儀)可測量方向變化。
理想情況下,將加速度計(jì)或陀螺儀組合在單個(gè)芯片上,三個(gè)軸可以提供更好的軸對齊,并且可以確保兩種傳感器之間的最佳軸對齊。磁力計(jì)一般不能集成在單片中,因?yàn)樗鼈兊慕Y(jié)構(gòu)與加速度計(jì)和陀螺儀不兼容。
雖然單片集成是可能的,但I(xiàn)MU通常由用于不同傳感器類型的共封裝芯片制成。
大多數(shù)IMU是使用三個(gè)單獨(dú)的芯片組裝的(三軸陀螺儀,三軸加速度計(jì)和三軸磁力計(jì))。高性能IMU可能包含三個(gè)單獨(dú)的單軸陀螺儀芯片,并且可能包含五到九個(gè)芯片。在這種情況下,需要從正交性的任何偏差中進(jìn)行調(diào)整。
無論IMU是包含單個(gè)芯片,還是組合了單獨(dú)的加速度計(jì)和陀螺儀芯片,每個(gè)傳感器的每個(gè)軸都會(huì)被計(jì)數(shù)。這提供了一個(gè)所謂的六軸傳感器(如果沒有磁力計(jì))。具有三軸磁力計(jì)的IMU被視為九軸傳感器。
航位推算,漂移,等級(jí)和價(jià)格
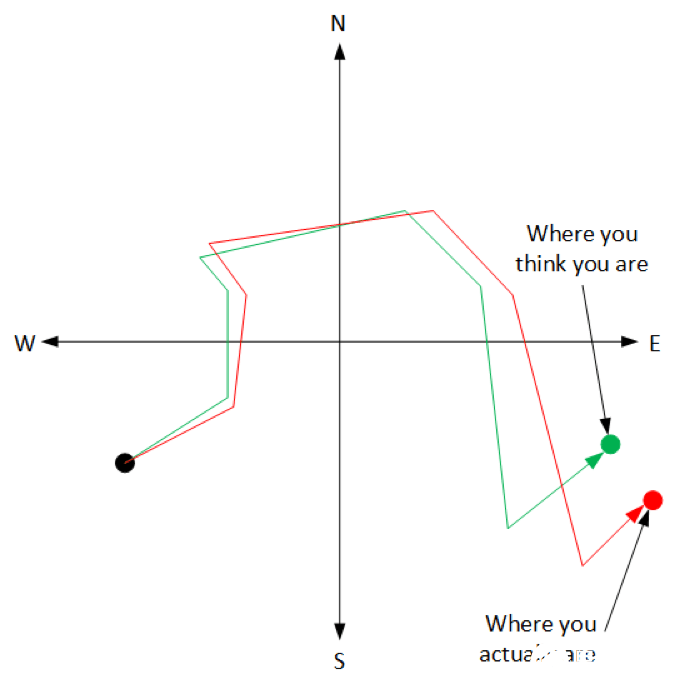
航位推算是指通過跟蹤位置和方向隨時(shí)間的變化來測量位置的過程。以給定的速度沿特定方向行駛將產(chǎn)生一個(gè)的位置。從該位置繼續(xù)行駛到一個(gè)新位置。
然而,挑戰(zhàn)在于沒有任何測量是沒有錯(cuò)誤的。每個(gè)測量位置都會(huì)有一定的誤差,而下一個(gè)位置的測量也會(huì)有誤差,并且該誤差將加重第一個(gè)位置的誤差。這些誤差可能累積到實(shí)際位置可能與計(jì)算出的位置明顯偏離的地步。
如果用性能來定義這些系統(tǒng)的應(yīng)用等級(jí),那么以偏置穩(wěn)定性(或偏置不穩(wěn)定性或漂移)來衡量。漂移是以度/小時(shí)或每小時(shí)累積的方向誤差度數(shù)為單位的。
加速度計(jì)和陀螺儀都有誤差,但是陀螺儀主導(dǎo)了整體漂移。這導(dǎo)致了IMU根據(jù)其適合的應(yīng)用進(jìn)行分級(jí)。
最苛刻的應(yīng)用仍然需要機(jī)械傳感器,并且非常昂貴。
較舊的機(jī)械模型正在讓步給較新的技術(shù),其中包括正在逐步改進(jìn)的MEMS技術(shù)。MEMS單元可能會(huì)侵蝕FOG技術(shù)今天可以解決的某些問題,但將來不太可能取代HRG和RLG技術(shù)。預(yù)計(jì)將增長到足以使MEMS失去低端地位的同時(shí),仍將保持增長并保持自己的地位。
MEMS技術(shù)降低了低端IMU的價(jià)格,這些IMU主要用于商業(yè)(如智能手機(jī))和工業(yè)應(yīng)用。
博世產(chǎn)品經(jīng)理Peter Spoden和Michael Rupp表示,MEMS陀螺儀的漂移已減半,并有望進(jìn)一步改善。他們說:“ 10°/ h的不穩(wěn)定性一直是MEMS的行業(yè)標(biāo)準(zhǔn),” 如今,使用MEMS可以達(dá)到1至5°/ h。對于未來,低于1°/ h的范圍似乎可以實(shí)現(xiàn)。
那么,MEMS技術(shù)會(huì)繼續(xù)進(jìn)入高端應(yīng)用領(lǐng)域嗎?隨著自動(dòng)駕駛汽車的出現(xiàn),人們對針對汽車市場定價(jià)的更高質(zhì)量的傳感器重新產(chǎn)生了興趣。但是,盡管一家公司似乎已朝著這個(gè)方向邁出了一大步,但大多數(shù)制造商認(rèn)為,由于IMU通常與其他技術(shù)結(jié)合以糾正錯(cuò)誤,因此進(jìn)一步的改進(jìn)并不是真正重要的。
傳感器融合
盡管MEMS IMU在任何長時(shí)間內(nèi)都不可能進(jìn)行航位推算,但MEMS陀螺儀仍被定位用于安全關(guān)鍵型應(yīng)用,例如自動(dòng)駕駛汽車導(dǎo)航。這是因?yàn)橥勇輧x(通常是IMU)只是一種導(dǎo)航技術(shù)。
位置信息的主要來源仍然是GNSS信號(hào),例如GPS。西門子業(yè)務(wù)部門Mentor的應(yīng)用工程顧問Jeff Miller表示:“許多用例都依靠GPS使用卡爾曼濾波器等進(jìn)行漂移校正,因此他們不必?fù)?dān)心長期漂移。” 當(dāng)車輛進(jìn)入隧道或停車場,傳遞信號(hào)的衛(wèi)星不再“可見”時(shí),這種方法將失敗。在這種情況下,IMU可以提供短期位置信息,直到重新獲取GNSS信號(hào)為止。
另一位專家菲茨杰拉德說:“如果您要能夠承受GPS的5秒模糊測試,并且以50至70英里/小時(shí)的速度行駛,則需要一個(gè)非常好的陀螺儀。” “如果您只擔(dān)心一秒鐘的退出,那么也許您可以擺脫精度較低的陀螺儀的困擾。” 但是,例如阿爾卑斯山中最長的公路隧道是哥德哈德公路隧道,長約17公里(10.5英里)。以60 mph的速度行駛時(shí),這意味著離GNSS信號(hào)的距離會(huì)略微超過10分鐘,而對于MEMS IMU來說,這是很長的時(shí)間。
磁力計(jì)還用于幫助校正陀螺儀的漂移。磁力儀像陀螺儀一樣測量方位,這提供了一個(gè)相對穩(wěn)定的參考點(diǎn),因此算法可以同時(shí)查看陀螺儀和磁力計(jì)的結(jié)果來確定方向。
GNSS信號(hào)不可用時(shí)會(huì)與IMU進(jìn)行折衷(這意味著一個(gè)或另一個(gè)正在使用中),而GNSS信號(hào)與之不同,此處兩個(gè)傳感器不斷融合在一起,以達(dá)到比單獨(dú)使用任一個(gè)傳感器更準(zhǔn)確的結(jié)果。這是所謂的傳感器融合的特定示例。它合并大量傳感器輸出的結(jié)果,以產(chǎn)生更好的組合結(jié)果。
磁力計(jì)也有其缺點(diǎn),主要是有些物體可能影響磁場。被稱為“磁異常”的金屬車輛,電梯,甚至大的巖石露頭都會(huì)使磁力計(jì)的讀數(shù)失真。在此類異常持續(xù)存在的應(yīng)用中(例如,在大型電動(dòng)機(jī)附近或在電氣室內(nèi)),不能可靠地使用磁力計(jì)。
但是,在那些應(yīng)用程序之外,異常可能是暫時(shí)的。沒有一種拒絕異常的固定算法。
除此之外,還有許多其他技術(shù)可以幫助定位服務(wù)。IMU提供“由內(nèi)而外”的視圖,移動(dòng)傳感器在其中確定自己的位置。外部信號(hào)(如GNSS)提供“從里到外”的視圖,其中外部因素告訴移動(dòng)的物體在哪里。例如,在購物中心內(nèi),各種WiFi或藍(lán)牙信標(biāo)都可以對購物者及其智能手機(jī)的位置進(jìn)行三角測量。智能手機(jī)中的IMU和信標(biāo)信號(hào)一起可以提供足夠精確的定位,以在商店內(nèi)定位購物者。
當(dāng)然,這種方法也可以在道路上使用。可以開始在道路,基礎(chǔ)設(shè)施中放置信標(biāo)。比如將信標(biāo)放在隧道中。
對于自動(dòng)駕駛汽車而言,至關(guān)重要的一點(diǎn)是,偏離路線的余地很小。如果您在高速公路上開車,您可能無法承受超過10或20厘米的漂移,否則有可能撞到相鄰的汽車。
這是高級(jí)駕駛員輔助系統(tǒng)(ADAS)尤為重要的地方。這種系統(tǒng)為車輛配備了許多額外的傳感器,尤其是攝像頭,雷達(dá)和激光雷達(dá)。使用AI算法將這些傳感器信號(hào)組合在一起,以識(shí)別預(yù)期和意外的項(xiàng)目,從而提供了一個(gè)巨大的傳感器融合解決方案。
博世團(tuán)隊(duì)表示:“無人駕駛汽車始終必須獲得環(huán)境認(rèn)可。” “ IMU絕不能單獨(dú)使用,而必須始終是一個(gè)完整系統(tǒng)的一部分,該系統(tǒng)由激光雷達(dá),雷達(dá)和軟件等其他設(shè)備組成。作為這種系統(tǒng)的一部分,今天的IMU就足夠了。”
但是,對于可能無法停留在涂有油漆良好線條的城市道路上的“隨處可見”車輛,它們可能不夠用。在如此遙遠(yuǎn)的地區(qū),自動(dòng)駕駛?cè)允遣荒芙鉀Q的問題(尤其是在沒有蜂窩通信的情況下)。菲茨杰拉德說:“要讓自動(dòng)駕駛汽車在沒有這些車道標(biāo)志或交通信號(hào)燈或停車牌識(shí)別的地形上行駛,將是非常困難的。”
“我們需要將ADAS車輛(具有越來越高的自治性)和機(jī)器人汽車(或Robotaxis)分開,它們已經(jīng)完全自主,但是在地理上受到限制。” “由于機(jī)械人的業(yè)務(wù)模型(移動(dòng)即服務(wù))不同,目前暫時(shí)沒有成本約束。但是他們對性能有很高的要求。”
對于配備ADAS的汽車,購買價(jià)格是主要的經(jīng)濟(jì)考慮因素。因此,根據(jù)車的成本控制,IMU的價(jià)格必須低于100美元,這樣在60 km / hr的速度下,它們在20到30秒內(nèi)的漂移精度僅為幾厘米。相比之下,robotaxis可以忍受更高的精度價(jià)格-每行駛1公里僅漂移幾厘米的系統(tǒng),其價(jià)格就高達(dá)10,000美元。
需要導(dǎo)航的低成本車輛可能仍然認(rèn)為高質(zhì)量MEMS IMU過于昂貴。對于那些想要將這類陀螺儀用于無人機(jī),機(jī)器人和不支持300美元價(jià)格的產(chǎn)品的人們來說,它開始崩潰。他們可以花30美元購買MEMS陀螺儀,但300美元太高了。”
對于所有的融合傳感器,甚至可能有人會(huì)質(zhì)疑某些駕駛應(yīng)用是否仍需要IMU。其他傳感器(雷達(dá),攝像機(jī),激光雷達(dá)等)的組合所取得的進(jìn)展提出了慣性系統(tǒng)從長遠(yuǎn)來看是否有用的問題。在某些時(shí)候,所有其他傳感器都可以在沒有此類傳感器的情況下校準(zhǔn)汽車的位置。
結(jié)論
尚不清楚MEMS陀螺儀將進(jìn)一步改善多少。在大多數(shù)情況下,它們正在逐漸變得更好。但是,由于在此類汽車中設(shè)計(jì)了大量傳感器融合技術(shù),因此他們沒有很大的壓力去改進(jìn)最明顯的應(yīng)用,即汽車。
如果他們能夠?qū)崿F(xiàn)更高的運(yùn)營等級(jí),那么它們可能會(huì)降低高端成本,但是其中許多應(yīng)用程序都有嚴(yán)格的要求和較低的體積,因此投資回報(bào)率不確定。巨大的改進(jìn)將需要苛刻的新應(yīng)用程序。
責(zé)任編輯:gt
-
mems
+關(guān)注
關(guān)注
129文章
3898瀏覽量
190350 -
陀螺儀
+關(guān)注
關(guān)注
44文章
779瀏覽量
98579 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
783文章
13684瀏覽量
166150
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
愛普生XV-9300LP汽車陀螺儀傳感器的特征和用途
MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
愛普生X2A0002710002 XV7011BB陀螺儀傳感器用于高精設(shè)備行業(yè)

優(yōu)可測白光干涉儀:激光陀螺儀提升良率與精度的關(guān)鍵
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
XV7181BB 陀螺儀傳感器在自動(dòng)駕駛設(shè)備中的應(yīng)用

MEMS陀螺儀工作原理及性能提升方法的綜述

陀螺儀x軸和y軸的應(yīng)用
用于自動(dòng)駕駛,無人駕駛領(lǐng)域的IMU六軸陀螺儀傳感器:M-G370
EPSON X2A0002710002 XV7011BB陀螺儀傳感器的特征和用途
MEMS加速度計(jì)與MEMS陀螺儀的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論