 PPM協議的波形圖
PPM協議的波形圖
PPM協議
無人機遙控器與飛控之間傳輸最常用的就是PWM,PPM,S.BUS等協議。其中PPM協議只需要一根線就可以傳輸,避免了PWM需要多路才能傳輸多個通道的問題。
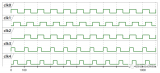
下面是PPM協議的波形圖
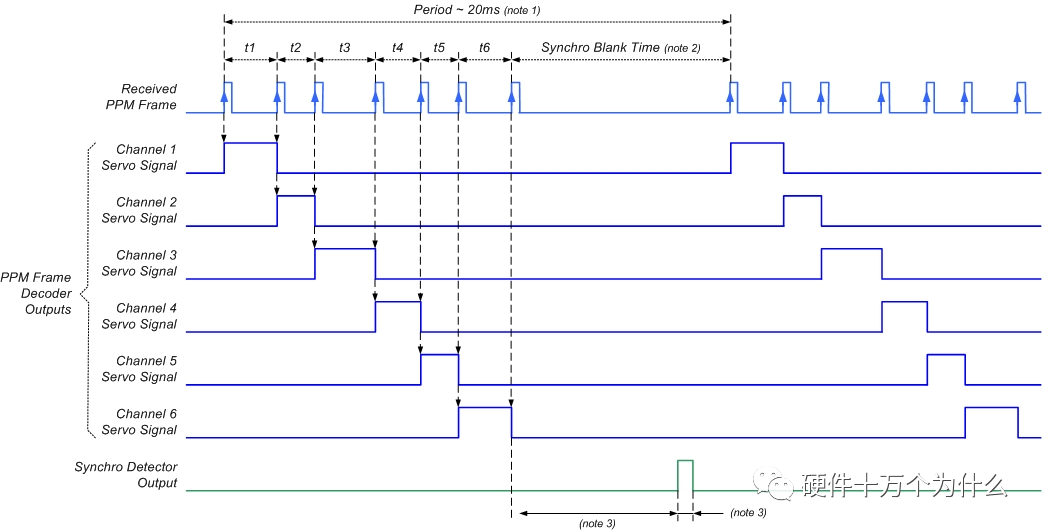
PPM協議最多傳輸20個通道,使用一個定時器就可以輕松解決了。
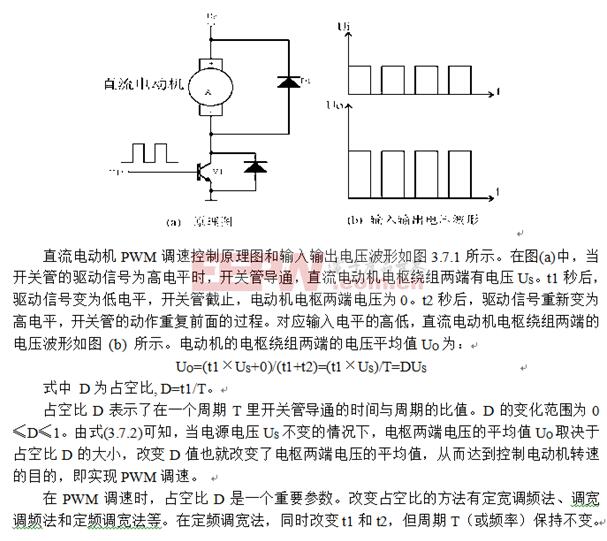
PWM協議
PWM信號用于控制單個電調或者單個舵機脈沖寬度調制信號。
電機(電調)上用到PWM信號種類很多,我們這里對常見的PWM信號特征進行一個描述:
1、 PWM信號是一個周期性的方波信號,周期為20ms,也就是50Hz的刷新頻率。
2、 PWM每一周期中的高電平持續時間為1~2ms(1000us~2000us),代表了油門控制量。一般四旋翼中1100us對應0油門,1900us對應滿油門。
PCM是英文pulse-code modulation的縮寫,中文的意思是:脈沖編碼調制,又稱脈碼調制。PPM是英文pulse position modulation的縮寫,中文意思是:脈沖位置調制,又稱脈位調制,這里順便提一句,有些航模愛好者誤將PPM編碼說成是FM,其實這是兩個不同的概念。前者指的是信號脈沖的編碼方式,后者指的是高頻電路的調制方式。比例遙控發射電路的工作原理如圖1所示。操作通過操縱發射機上的手柄,將電位器組值的 變化信息送人編碼電路。編碼電路將其轉換成一組脈沖編碼信號(PPM或PCM)。這組脈沖編碼信號經過高頻調制電路(AM或FM)調制后,再經高放電路發送出去。PPM的編解碼方式一般是使用積分電路來實現的,而PCM編解碼則是用模/數(A/D)和數/模(D/A)轉技術實現的。
目前,比例遙控設備中最常用的兩種脈沖編碼方式就是PPM和PCM:最常用的兩種高頻調制方式是FM調頻和AM調幅:最常見的組合為PPM/AM脈位調制 編碼/調幅、PPM/FM脈位調制編碼/調頻、PPM/FM脈沖調只編碼/調頻三種形式。通常的PPM接收解碼電路都由通用的數字集成電路組成,如 CD4013,CD4015等。對于這類電路來說,只要輸入脈沖的上升沿達到一定的高度,都可以使其翻轉。這樣,一旦輸入脈沖中含有干擾脈沖,就會造成輸 出混亂。由于干擾脈沖的數量和位置是隨機的,因此在接收機輸出端產生的效果就是“抖舵”。除此之外,因電位器接觸不好而造成編碼波形的畸變等原因,也會影 響接收效果,造成“抖舵”。對于窄小的干擾脈沖,一般的PPM電路可以采用濾波的方式消除;而對于較寬的干擾脈沖,濾波電路就無能為力了。這就是為什么普 通的PPM比例遙控設備,在強干擾的環境下或超出控制范圍時會產生誤動作的原因。尤其是在有同頻干擾的情況下,模型往往會完全失控。
每一個遙控器通道都需要一個PWM采集器進行采集,但是對于STM32來說不可能使用多個定時器來采集多個通道的PWM,這對于STM32的資源來說十分浪費。因此采用的就是PPM編碼。PPM編碼是PWM的擴展協議,可以在一個管腳中傳輸多路PWM信號。 PPM的頻率通常是50Hz,周期長度20ms,每一個周期中可以存放最多10路PWM信號,每一路PWM的周期為2ms,如下圖所示:
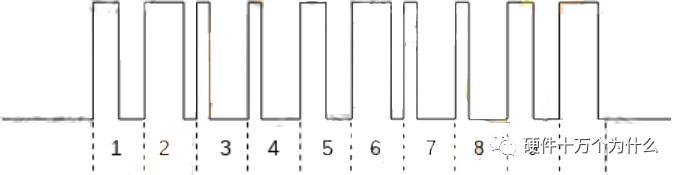
使用STM32的管腳中斷配合定時器中的計數可以準確的捕獲一個周期內的PPM信號中的高低電平變化,每2ms就是一路PWM信號的周期。
責任編輯人:CC
-
協議
+關注
關注
2文章
598瀏覽量
39182 -
波形圖
+關注
關注
1文章
34瀏覽量
14914 -
PPM
+關注
關注
0文章
46瀏覽量
16960
原文標題:無人機接收機的PPM協議
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
labview的波形圖問題

LabVIEW中導出波形圖或圖表至文件
LabVIEW初級教程之波形圖和波形圖表的詳細資料說明
LabVIEW初級教程之波形圖和波形圖表的相關例程合集免費下載






 工商網監
工商網監
評論