") 我國工業(yè)機(jī)器人呈現(xiàn)強(qiáng)勁發(fā)展的態(tài)勢
我國工業(yè)機(jī)器人呈現(xiàn)強(qiáng)勁發(fā)展的態(tài)勢
《中國制造2025》規(guī)劃了我國制造強(qiáng)國的戰(zhàn)略目標(biāo),智能制造成為工業(yè)制造轉(zhuǎn)型的重中之重。在智能化的大勢下,智能裝備下游應(yīng)用領(lǐng)域加快拓展,工業(yè)機(jī)器人發(fā)展可期。
工業(yè)機(jī)器人指的是能在人的控制下智能工作,并能完美替代人力在生產(chǎn)線上工作的多關(guān)節(jié)機(jī)械手或多自由度的機(jī)器裝置。與人力相比,工業(yè)機(jī)器人具有低成本、高效率以及24小時工作的特點(diǎn)。近年來,隨著國內(nèi)勞動力成本不斷上漲,我國制造業(yè)勞動力優(yōu)勢不顯,制造業(yè)亟待向智能化轉(zhuǎn)型,工業(yè)機(jī)器人呈現(xiàn)強(qiáng)勁發(fā)展的態(tài)勢。
我國是工業(yè)機(jī)器人消費(fèi)大國,從2013年其就連續(xù)兩年成為全球第一大工業(yè)機(jī)器人消費(fèi)市場。汽車制造、電子、橡膠塑料、軍工、航空制造、食品工業(yè)、醫(yī)藥設(shè)備與金屬制品等領(lǐng)域常有工業(yè)機(jī)器人“身影”。其中汽車工業(yè)的應(yīng)用最多,比例達(dá)38%。廣東、江蘇、上海、北京等地是我國工業(yè)機(jī)器人產(chǎn)業(yè)主要集中的地區(qū),擁有的工業(yè)機(jī)器人數(shù)量占據(jù)全國工業(yè)機(jī)器人市場的半壁江山。
不過,由于核心技術(shù)缺乏,我國工業(yè)機(jī)器人消費(fèi)嚴(yán)重依賴國外企業(yè),尤其在減速機(jī)、伺服電機(jī)、控制器等核心零部件上,我國本土機(jī)器人企業(yè)受制于人,只能購買高昂的國外設(shè)備,這需要國產(chǎn)工業(yè)機(jī)器人廠商不斷提高技術(shù),加大研發(fā)水平,早日擺脫國外機(jī)器人品牌對中國工業(yè)機(jī)器人消費(fèi)市場的控制。
考慮到目前全球制造業(yè)工業(yè)機(jī)器人密度為55,而中國工業(yè)機(jī)器人密度僅為21,遠(yuǎn)低于日韓德美等發(fā)達(dá)國家,以及智能制造背景下,“機(jī)器換人”政策不斷落地,未來我國工業(yè)機(jī)器人市場還有很大的增長空間。匯川技術(shù)、機(jī)器人、智云股份、科遠(yuǎn)股份、秦川機(jī)床等相關(guān)概念公司將在機(jī)器人紅利下取得較好發(fā)展。
工業(yè)機(jī)器人的發(fā)展階段
工業(yè)機(jī)器人的發(fā)展通常可規(guī)劃分為三代:
1、第一代工業(yè)機(jī)器人:
通常是指目前國際上商品化與使用化的“可編程的工業(yè)機(jī)器人”,又稱“示教再現(xiàn)工業(yè)機(jī)器人”,即為了讓工業(yè)機(jī)器人完成某項(xiàng)作業(yè),首先由操作者將完成該作業(yè)所需要的各種知識(如運(yùn)動軌跡、作業(yè)條件、作業(yè)順序和作業(yè)時間等),通過直接或間接手段,對工業(yè)機(jī)器人進(jìn)行“示教”,工業(yè)機(jī)器人將這些知識記憶下來后,即可根據(jù)“再現(xiàn)”指令,在一定精度范圍內(nèi),忠實(shí)的重復(fù)再現(xiàn)各種被示教的動作。1962年美國萬能自動化公司的第一臺Unimate工業(yè)機(jī)器人在美國通用汽車公司投入使用,標(biāo)志著第一代工業(yè)機(jī)器人的誕生。
2、第二代工業(yè)機(jī)器人:
通常是指具有某種智能(如觸覺、力覺、視覺等)功能的“智能機(jī)器人”。即有傳感器得到觸覺、力覺和視覺等信息計(jì)算機(jī)處理后,控制機(jī)器人的操作機(jī)完成相應(yīng)的適當(dāng)操作。1982年美國通用汽車在裝配線上為工業(yè)機(jī)器人裝備了視覺系統(tǒng),從而宣布了新一代智能工業(yè)機(jī)器人的問世。
3、第三代工業(yè)機(jī)器人:
即所謂的“只治式工業(yè)機(jī)器人”。它不僅具有感知功能,而且還有一定的決策及規(guī)劃能力。第一代工業(yè)機(jī)器人目前仍處在實(shí)驗(yàn)室研究階段。工業(yè)機(jī)器人經(jīng)歷了誕生---成長---成熟期后,已成為制造業(yè)中不可缺少的核心裝備,世界上有約75萬臺工業(yè)機(jī)器人正與工人朋友并肩戰(zhàn)斗在個條生產(chǎn)線上。
特種機(jī)器人作為機(jī)器人家族的后起之秀,由于其用途廣泛而大有后來居上之勢,仿人機(jī)器人、農(nóng)業(yè)機(jī)器人、服務(wù)機(jī)器人、水下機(jī)器人、醫(yī)療機(jī)器人、軍用機(jī)器人、娛樂機(jī)器人等各種用途發(fā)特種機(jī)器人紛紛面世,而且正以飛快的速度向?qū)嵱没~進(jìn)。
工業(yè)機(jī)器人的分類
工業(yè)機(jī)器人按不同的方法可分下述類型
1、工業(yè)機(jī)器人按操作機(jī)坐標(biāo)形式分以下幾類:(坐標(biāo)形式是指操作機(jī)的手臂在運(yùn)動時所取的參考坐標(biāo)系的形式。)
(1)直角坐標(biāo)型工業(yè)機(jī)器人
其運(yùn)動部分由三個相互垂直的直線移動(即PPP)組成,其工作空間圖形為長方形。它在各個軸向的移動距離,可在各個坐標(biāo)軸上直接讀出,直觀性強(qiáng),易于位置和姿態(tài)的編程計(jì)算,定位精度高,控制無耦合,結(jié)構(gòu)簡單,但機(jī)體所占空間體積大,動作范圍小,靈活性差,難與其他工業(yè)機(jī)器人協(xié)調(diào)工作。
(2)圓柱坐標(biāo)型工業(yè)機(jī)器人
其運(yùn)動形式是通過一個轉(zhuǎn)動和兩個移動組成的運(yùn)動系統(tǒng)來實(shí)現(xiàn)的,其工作空間圖形為圓柱,與直角坐標(biāo)型工業(yè)機(jī)器人相比,在相同的工作空間條件下,機(jī)體所占體積小,而運(yùn)動范圍大,其位置精度僅次于直角坐標(biāo)型機(jī)器人,難與其他工業(yè)機(jī)器人協(xié)調(diào)工作。
(3)球坐標(biāo)型工業(yè)機(jī)器人
又稱極坐標(biāo)型工業(yè)機(jī)器人,其手臂的運(yùn)動由兩個轉(zhuǎn)動和一個直線移動(即RRP,一個回轉(zhuǎn),一個俯仰和一個伸縮運(yùn)動)所組成,其工作空間為一球體,它可以作上下俯仰動作并能抓取地面上或教低位置的協(xié)調(diào)工件,其位置精度高,位置誤差與臂長成正比。
(4)多關(guān)節(jié)型工業(yè)機(jī)器人
又稱回轉(zhuǎn)坐標(biāo)型工業(yè)機(jī)器人,這種工業(yè)機(jī)器人的手臂與人一體上肢類似,其前三個關(guān)節(jié)是回轉(zhuǎn)副(即RRR),該工業(yè)機(jī)器人一般由立柱和大小臂組成,立柱與大臂見形成肩關(guān)節(jié),大臂和小臂間形成肘關(guān)節(jié),可使大臂做回轉(zhuǎn)運(yùn)動和俯仰擺動,小臂做仰俯擺動。其結(jié)構(gòu)最緊湊,靈活性大,占地面積最小,能與其他工業(yè)機(jī)器人協(xié)調(diào)工作,但位置精度教低,有平衡問題,控制耦合,這種工業(yè)機(jī)器人應(yīng)用越來越廣泛。
(5)平面關(guān)節(jié)型工業(yè)機(jī)器人
它采用一個移動關(guān)節(jié)和兩個回轉(zhuǎn)關(guān)節(jié)(即PRR),移動關(guān)節(jié)實(shí)現(xiàn)上下運(yùn)動,而兩個回轉(zhuǎn)關(guān)節(jié)則控制前后、左右運(yùn)動。這種形式的工業(yè)機(jī)器人又稱(SCARA(Seletive Compliance Assembly Robot Arm)裝配機(jī)器人。在水平方向則具有柔順性,而在垂直方向則有教大的剛性。它結(jié)構(gòu)簡單,動作靈活,多用于裝配作業(yè)中,特別適合小規(guī)格零件的插接裝配,如在電子工業(yè)的插接、裝配中應(yīng)用廣泛。
2、工業(yè)機(jī)器人按驅(qū)動方式分以下幾類:
(1)氣動式工業(yè)機(jī)器人
這類工業(yè)機(jī)器人以壓縮空氣來驅(qū)動操作機(jī),其優(yōu)點(diǎn)是空氣來源方便,動作迅速,結(jié)構(gòu)簡單造價低,無污染,缺點(diǎn)是空氣具有可壓縮性,導(dǎo)致工作速度的穩(wěn)定性較差,又因氣源壓力一般只有6kPa左右,所以這類工業(yè)機(jī)器人抓舉力較小,一般只有幾十牛頓,最大百余牛頓。
(2)液壓式工業(yè)機(jī)器人
液壓壓力比氣壓壓力高得多,一般為70kPa左右,故液壓傳動工業(yè)機(jī)器人具有較大的抓舉能力,可達(dá)上千牛頓。這類工業(yè)機(jī)器人結(jié)構(gòu)緊湊,傳動平穩(wěn),動作靈敏,但對密封要求較高,且不宜在高溫或低溫環(huán)境下工作。
(3) 電動式工業(yè)機(jī)器人
這是目前用得最多的一類工業(yè)機(jī)器人,不僅因?yàn)殡妱訖C(jī)品種眾多,為工業(yè)機(jī)器人設(shè)計(jì)提供了多種選擇,也因?yàn)樗鼈兛梢赃\(yùn)用多種靈活控制的方法。早期多采用步進(jìn)電機(jī)驅(qū)動,后來發(fā)展了直流伺服驅(qū)動單元,目前交流伺服驅(qū)動單元也在迅速發(fā)展。這些驅(qū)動單元或是直接驅(qū)動操作機(jī),或是通過諸如諧波減速器的裝置來減速后驅(qū)動,結(jié)構(gòu)十分緊湊、簡單。
工業(yè)機(jī)器人的控制系統(tǒng)
機(jī)器人系統(tǒng)的結(jié)構(gòu)由機(jī)器人的機(jī)構(gòu)部分、傳感器組、控制部分及信息處理部分組成。其中控制系統(tǒng)是機(jī)器人產(chǎn)業(yè)的一個核心環(huán)節(jié)。
1、工業(yè)機(jī)器人控制系統(tǒng)所要達(dá)到的功能
機(jī)器人控制系統(tǒng)用于對操作機(jī)的控制,以完成特定的工作任務(wù),其基本功能如下:
(1)記憶功能:
存儲作業(yè)順序、運(yùn)動路徑、運(yùn)動方式、運(yùn)動速度和與生產(chǎn)工藝有關(guān)的信息。
(2)示教功能:
離線編程,在線示教,間接示教。在線示教包括示教盒和導(dǎo)引示教兩種。
(3)與外圍設(shè)備聯(lián)系功能:
輸入和輸出接口、通信接口、網(wǎng)絡(luò)接口、同步接口。
(4)坐標(biāo)設(shè)置功能:
有關(guān)節(jié)、絕對、工具、用戶自定義四種坐標(biāo)系。
(5)人機(jī)接口:
示教盒、操作面板、顯示屏。
(6)傳感器接口:
位置檢測、視覺、觸覺、力覺等。
(7)位置伺服功能:
機(jī)器人多軸聯(lián)動、運(yùn)動控制、速度和加速度控制、動態(tài)補(bǔ)償?shù)取?br />
(8)故障診斷安全保護(hù)功能:
運(yùn)行時系統(tǒng)狀態(tài)監(jiān)視、故障狀態(tài)下的安全保護(hù)和故障自診斷。
2、工業(yè)機(jī)器人控制系統(tǒng)的組成
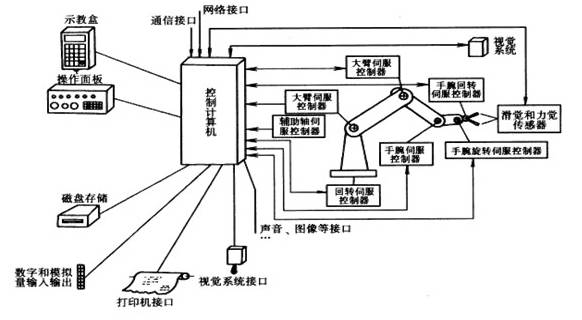
機(jī)器人控制系統(tǒng)組成框圖
(1)控制計(jì)算機(jī):
控制系統(tǒng)的調(diào)度指揮機(jī)構(gòu)。一般為微型機(jī)、微處理器有32位、64位等,如奔騰系列CPU以及其他類型CPU。
(2)示教盒:
示教機(jī)器人的工作軌跡和參數(shù)設(shè)定,以及所有人機(jī)交互操作,擁有自己獨(dú)立的CPU以及存儲單元,與主計(jì)算機(jī)之間以串行通信方式實(shí)現(xiàn)信息交互。
(3)操作面板:
由各種操作按鍵、狀態(tài)指示燈構(gòu)成,只完成基本功能操作。
(4)硬盤和軟盤存儲存:
儲機(jī)器人工作程序的外圍存儲器。
(5)數(shù)字和模擬量輸入輸出:
各種狀態(tài)和控制命令的輸入或輸出。
(6)打印機(jī)接口:
記錄需要輸出的各種信息。
(7)傳感器接口:
用于信息的自動檢測,實(shí)現(xiàn)機(jī)器人柔順控制,一般為力覺、觸覺和視覺傳感器。
(8)軸控制器:
完成機(jī)器人各關(guān)節(jié)位置、速度和加速度控制。
(9)輔助設(shè)備控制:
用于和機(jī)器人配合的輔助設(shè)備控制,如手爪變位器等。
(10)通信接口:
實(shí)現(xiàn)機(jī)器人和其他設(shè)備的信息交換,一般有串行接口、并行接口等。
(11)網(wǎng)絡(luò)接口
1)Ethernet接口:可通過以太網(wǎng)實(shí)現(xiàn)數(shù)臺或單臺機(jī)器人的直接PC通信,數(shù)據(jù)傳輸速率高達(dá)10Mbit/s,可直接在PC上用windows庫函數(shù)進(jìn)行應(yīng)用程序編程之后,支持TCP/IP通信協(xié)議,通過Ethernet接口將數(shù)據(jù)及程序裝入各個機(jī)器人控制器中。
2)Fieldbus接口:支持多種流行的現(xiàn)場總線規(guī)格,如Device net、AB Remote I/O、Interbus-s、profibus-DP、M-NET等。
3、工業(yè)機(jī)器人控制系統(tǒng)分類
(1)程序控制系統(tǒng):
給每一個自由度施加一定規(guī)律的控制作用,機(jī)器人就可實(shí)現(xiàn)要求的空間軌跡。
(2)自適應(yīng)控制系統(tǒng):
當(dāng)外界條件變化時,為保證所要求的品質(zhì)或?yàn)榱穗S著經(jīng)驗(yàn)的積累而自行改善控制品質(zhì),其過程是基于操作機(jī)的狀態(tài)和伺服誤差的觀察,再調(diào)整非線性模型的參數(shù),一直到誤差消失為止。這種系統(tǒng)的結(jié)構(gòu)和參數(shù)能隨時間和條件自動改變。
(3)人工智能系統(tǒng):
事先無法編制運(yùn)動程序,而是要求在運(yùn)動過程中根據(jù)所獲得的周圍狀態(tài)信息,實(shí)時確定控制作用。
驅(qū)動方式:參見工業(yè)機(jī)器人驅(qū)動系統(tǒng)。
運(yùn)動方式:
(4)點(diǎn)位式:
要求機(jī)器人準(zhǔn)確控制末端執(zhí)行器的位姿,而與路徑無關(guān);
(5)軌跡式:
要求機(jī)器人按示教的軌跡和速度運(yùn)動。
(6)控制總線:
國際標(biāo)準(zhǔn)總線控制系統(tǒng)。采用國際標(biāo)準(zhǔn)總線作為控制系統(tǒng)的控制總線,如VME、MULTI-bus、STD-bus、PC-bus。
(7)自定義總線控制系統(tǒng):
由生產(chǎn)廠家自行定義使用的總線作為控制系統(tǒng)總線。
(8)編程方式:
物理設(shè)置編程系統(tǒng)。由操作者設(shè)置固定的限位開關(guān),實(shí)現(xiàn)起動,停車的程序操作,只能用于簡單的拾起和放置作業(yè)。
(9)在線編程:
通過人的示教來完成操作信息的記憶過程編程方式,包括直接示教(即手把手示教)模擬示教和示教盒示教。
(10)離線編程:
不對實(shí)際作業(yè)的機(jī)器人直接示教,而是脫離實(shí)際作業(yè)環(huán)境,生成示教程序,通過使用高級機(jī)器人,編程語言,遠(yuǎn)程式離線生成機(jī)器人作業(yè)軌跡。
4、機(jī)器人控制系統(tǒng)結(jié)構(gòu)
機(jī)器人控制系統(tǒng)按其控制方式可分為三類。
(1)集中控制系統(tǒng)(Centralized Control System ):
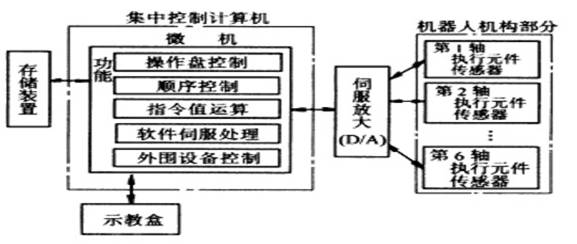
集中控制系統(tǒng)框圖
用一臺計(jì)算機(jī)實(shí)現(xiàn)全部控制功能,結(jié)構(gòu)簡單,成本低,但實(shí)時性差,難以擴(kuò)展,在早期的機(jī)器人中常采用這種結(jié)構(gòu),其構(gòu)成框圖,如圖所示。
基于PC 的集中控制系統(tǒng)里,充分利用了PC 資源開放性的特點(diǎn),可以實(shí)現(xiàn)很好的開放性:多種控制卡,傳感器設(shè)備等都可以通過標(biāo)準(zhǔn)PCI插槽或通過標(biāo)準(zhǔn)串口、并口集成到控制系統(tǒng)中。
集中式控制系統(tǒng)的優(yōu)點(diǎn)是:硬件成本較低,便于信息的采集和分析,易于實(shí)現(xiàn)系統(tǒng)的最優(yōu)控制,整體性與協(xié)調(diào)性較好,基于PC 的系統(tǒng)硬件擴(kuò)展較為方便。其缺點(diǎn)也顯而易見:系統(tǒng)控制缺乏靈活性,控制危險容易集中,一旦出現(xiàn)故障,其影響面廣,后果嚴(yán)重;由于工業(yè)機(jī)器人的實(shí)時性要求很高,當(dāng)系統(tǒng)進(jìn)行大量數(shù)據(jù)計(jì)算,會降低系統(tǒng)實(shí)時性,系統(tǒng)對多任務(wù)的響應(yīng)能力也會與系統(tǒng)的實(shí)時性相沖突;此外,系統(tǒng)連線復(fù)雜,會降低系統(tǒng)的可靠性。
(2)主從控制系統(tǒng):
采用主、從兩級處理器實(shí)現(xiàn)系統(tǒng)的全部控制功能。主CPU實(shí)現(xiàn)管理、坐標(biāo)變換、軌跡生成和系統(tǒng)自診斷等;從CPU實(shí)現(xiàn)所有關(guān)節(jié)的動作控制。其構(gòu)成框圖,如圖。
主從控制方式系統(tǒng)實(shí)時性較好,適于高精度、高速度控制,但其系統(tǒng)擴(kuò)展性較差,維修困難。
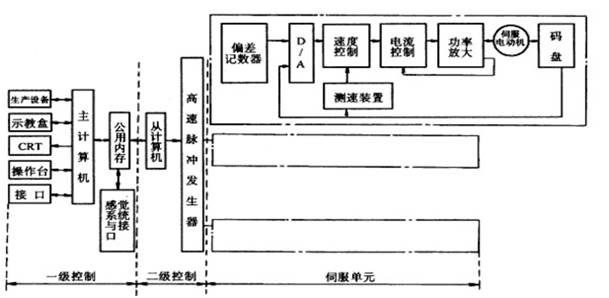
主從動控制系框圖
(3)分散控制系統(tǒng)(Distribute Control System ):
按系統(tǒng)的性質(zhì)和方式將系統(tǒng)控制分成幾個模塊,每一個模塊各有不同的控制任務(wù)和控制策略,各模式之間可以是主從關(guān)系,也可以是平等關(guān)系。
這種方式實(shí)時性好,易于實(shí)現(xiàn)高速、高精度控制,易于擴(kuò)展,可實(shí)現(xiàn)智能控制,是目前流行的方式。
其主要思想是“分散控制,集中管理”,即系統(tǒng)對其總體目標(biāo)和任務(wù)可以進(jìn)行綜合協(xié)調(diào)和分配,并通過子系統(tǒng)的協(xié)調(diào)工作來完成控制任務(wù),整個系統(tǒng)在功能、邏輯和物理等方面都是分散的,所以DCS 系統(tǒng)又稱為集散控制系統(tǒng)或分散控制系統(tǒng)。
這種結(jié)構(gòu)中,子系統(tǒng)是由控制器和不同被控對象或設(shè)備構(gòu)成的,各個子系統(tǒng)之間通過網(wǎng)絡(luò)等相互通訊。分布式控制結(jié)構(gòu)提供了一個開放、實(shí)時、精確的機(jī)器人控制系統(tǒng)。分布式系統(tǒng)中常采用兩級控制方式。
兩級分布式控制系統(tǒng),通常由上位機(jī)、下為機(jī)和網(wǎng)絡(luò)組成。上位機(jī)可以進(jìn)行不同的軌跡規(guī)劃和控制算法,下位機(jī)進(jìn)行插補(bǔ)細(xì)分、控制優(yōu)化等的研究和實(shí)現(xiàn)。上位機(jī)和下位機(jī)通過通訊總線相互協(xié)調(diào)工作,這里的通訊總線可以是RS-232、RS-485、EEE-488 以及USB 總線等形式。
現(xiàn)在,以太網(wǎng)和現(xiàn)場總線技術(shù)的發(fā)展為機(jī)器人提供了更快速、穩(wěn)定、有效的通訊服務(wù)。尤其是現(xiàn)場總線,它應(yīng)用于生產(chǎn)現(xiàn)場、在微機(jī)化測量控制設(shè)備之間實(shí)現(xiàn)雙向多結(jié)點(diǎn)數(shù)字通信,從而形成了新型的網(wǎng)絡(luò)集成式全分布控制系統(tǒng)—現(xiàn)場總線控制系統(tǒng)FCS ( Filed bus Control System )。
在工廠生產(chǎn)網(wǎng)絡(luò)中,將可以通過現(xiàn)場總線連接的設(shè)備統(tǒng)稱為“現(xiàn)場設(shè)備/儀表”。從系統(tǒng)論的角度來說,工業(yè)機(jī)器人作為工廠的生產(chǎn)設(shè)備之一,也可以歸納為現(xiàn)場設(shè)備。在機(jī)器人系統(tǒng)中引入現(xiàn)場總線技術(shù)后,更有利于機(jī)器人在工業(yè)生產(chǎn)環(huán)境中的集成。
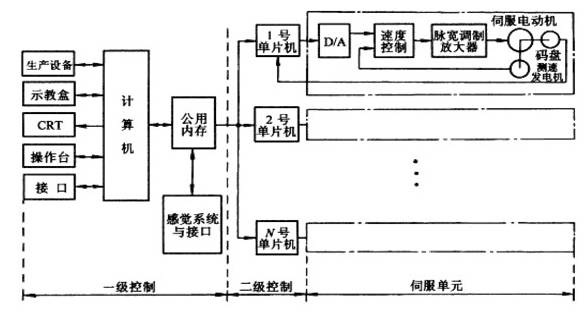
分布式控制系統(tǒng)框圖
分布式控制系統(tǒng)的優(yōu)點(diǎn)在于:系統(tǒng)靈活性好,控制系統(tǒng)的危險性降低,采用多處理器的分散控制,有利于系統(tǒng)功能的并行執(zhí)行,提高系統(tǒng)的處理效率,縮短響應(yīng)時間。
對于具有多自由度的工業(yè)機(jī)器人而言,集中控制對各個控制軸之間的藕合關(guān)系處理得很好,可以很簡單的進(jìn)行補(bǔ)償。但是,當(dāng)軸的數(shù)量增加到使控制算法變得很復(fù)雜時,其控制性能會惡化。而且,當(dāng)系統(tǒng)中軸的數(shù)量或控制算法變得很復(fù)雜時,可能會導(dǎo)致系統(tǒng)的重新設(shè)計(jì)。與之相比,分布式結(jié)構(gòu)的每一個運(yùn)動軸都由一個控制器處理,這意味著,系統(tǒng)有較少的軸間耦合和較高的系統(tǒng)重構(gòu)性。
“工業(yè)4.0”是指繼蒸汽機(jī)、電氣化與自動化后的第四次工業(yè)革命,它將傳統(tǒng)工業(yè)與數(shù)字信息技術(shù)結(jié)合,借助大數(shù)據(jù)、云計(jì)算等技術(shù)實(shí)現(xiàn)智能生產(chǎn)。在中國,“工業(yè)4.0”意味著國家制造業(yè)的升級,為此中國專門提出了“中國制造2025”的發(fā)展目標(biāo),目標(biāo)提出我國要在2025年前,從制造業(yè)大國邁入制造業(yè)強(qiáng)國。
原文標(biāo)題:機(jī)器換人時代的工業(yè)機(jī)器人
文章出處:【微信公眾號:傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
機(jī)器人
+關(guān)注
關(guān)注
210文章
28205瀏覽量
206532 -
智能制造
+關(guān)注
關(guān)注
48文章
5481瀏覽量
76261
原文標(biāo)題:機(jī)器換人時代的工業(yè)機(jī)器人
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【書籍評測活動NO.51】具身智能機(jī)器人系統(tǒng) | 了解AI的下一個浪潮!
機(jī)器人技術(shù)的發(fā)展趨勢
工業(yè)機(jī)器人常用的編程方式
abb工業(yè)機(jī)器人的編程語言是什么
基于飛凌嵌入式RK3568J核心板的工業(yè)機(jī)器人控制器應(yīng)用方案
其利天下技術(shù)·搭載無刷電機(jī)的掃地機(jī)器人的前景如何?
工業(yè)4.0中的機(jī)器人向協(xié)作機(jī)器人演進(jìn)
工業(yè)機(jī)器人連接解決方案

特種機(jī)器人的定義與分類

基于智能制造的工業(yè)機(jī)器人應(yīng)用實(shí)踐
LabVIEW的六軸工業(yè)機(jī)器人運(yùn)動控制系統(tǒng)
工業(yè)機(jī)器人產(chǎn)業(yè)發(fā)展及應(yīng)用現(xiàn)狀

工業(yè)機(jī)器人的發(fā)展現(xiàn)狀和趨勢
中國工業(yè)機(jī)器人應(yīng)用與趨勢剖析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論