 基于ucos-ii嵌入式操作系統和BF533實現視覺監控系統的應用方案
基于ucos-ii嵌入式操作系統和BF533實現視覺監控系統的應用方案
作者:王磊,王耀南,陳斯斯,崔波亮
嵌入式系統常用在一些特定專用設備上,通常這些設備的硬件資源(如處理器、存儲器等)非常有限,并且對成本很敏感,實時響應要求很高,特別是在面向視頻應用的系統中。嵌入式操作系統具有體積小、實時性好等優點。嵌入式操作系統ucos-ii就是基于任務優先級搶占的嵌入式實時操作系統。
1 系統硬件平臺設計
系統使用的主芯片是ADI公司Blackfin系列DSP中的BF533,這是一款專門面向視頻應用的DSP,擁有豐富的外設接口和較好的系統擴展性。本系統利用BF533的PPI接口采集數字圖像,利用芯片的EBIU總線,擴展SDRAM和網絡芯片。BF533工作在600MHz頻率,單個芯片即可完成對運動目標跟蹤和網絡傳輸等功能。基于BF533的嵌入式系統的外圍電路主要可分為三個部分:圖像采集部分,網絡傳輸部分,存儲器部分。系統硬件框圖如圖1:
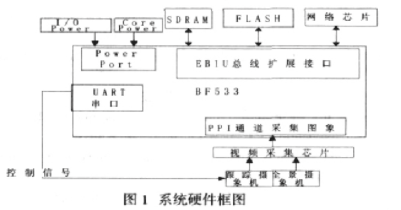
圖像采集電路部分采用了TI公司的TVP5150A型視頻解碼芯片,它將NTSC/PAL/SECAM制式的視頻信號轉換成8bits的ITU-656格式,并按照YCbCr格式以4:2:2的比例轉化成數字信號,支持兩路模擬輸入,解碼芯片通過I2C串行接口編程。
網絡傳輸部分采用LAN91C111芯片。這是SMSC公司為嵌入式應用系統推出的第三代快速以太網控制器。本系統中,LAN91C111被當作了是異步存儲空間,利用AMS3把它映射在BF533的0x20300000地址空間。這樣就可以通過DMA操作實現對LAN91C111內部存儲空間讀寫操作,提高了傳輸效率并使復雜的網絡數據傳輸過程簡單化。
存儲器部分BF533的存儲結構是統一的4GB尋址空間。同步存儲器、異步存儲器、外設存儲空間和片內存儲器全部統一映射在4GB的空間。BF533的EBIU接口中有專門的SDRAM控制單元SDC,可以和SDRAM無縫連接。BF533支持的SDRAM地址是從0x00000000到0x08000000的空間,最大128MB。本系統中使用MICRON公司的MT48LC系列SDRAM,存儲空間32MB,用于存儲圖像處理中的中間結果。另外,BF533支持四塊連續的異步存儲空間,每塊空間大小為1MB,地址從0x20000000到0x20400000,由相應的AMS0-AMS3引腳選擇使能。本系統使用的是ST公司的M29W系列FLASH,大小1MB。由AMS0片選使能,映射在BF533的第一塊異步存儲空間。
2 ucos-ii的移植
ucos-ii是一種具有可剝奪實時內核的實時操作系統,而且是免費公開源代碼、結構小巧。其內核提供任務調度與管理、時間管理、任務間同步與通信、內存管理和中斷服務等功能,具有執行效率高、占用空間小、實時性能優良和可擴展性強等特點。最小內核可編譯至2KB,適合小型控制系統。與CPU硬件相關的部分用匯編語言編寫,其他絕大部分代碼采用C語言編寫。ucos-ii在硬件平臺上的移植主要分為兩大步驟:ucos-ii中與處理器相關的程序的修改、應用程序的添加。
2.1 ucos-ii與嵌入式監控系統的軟硬件架構
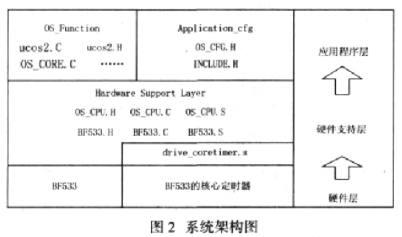
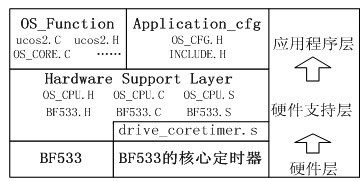
所有的嵌入式操作系統都是與CPU密切相關的,做移植前需要熟悉被移植CPU平臺的硬件架構和ucos-ii的運行原理,圖2是ucos-ii與本嵌入式監控系統的軟硬件架構。
2.2 基于BF533的ucos-ii的移植
移植ucos-ii需要理解處理器及C編譯器的技術細節。處理器和編譯器滿足了ucos-ii的要求,并且已經有了必要工具。移植工作通常包括以下幾個內容:
A用#define設置一個常量的值(OS_CPU.H);
B聲明10個數據類型(OS_CPU.H);
C用#define聲明三個宏(OS_CPU.H);
D用C語言編寫六個簡單的函數(OS_CPU_C.C);
E編寫四個匯編語言函數(OS_CPU_A.ASM);
針對不同的CPU平臺,移植ucos-ii的過程也會有稍許不同。在本系統中,移植過程大致分為兩大部分:1)修改部分文件使ucos-ii與DSP能夠實現良好的接口(主要指ucos-ii對DSP硬件架構的支持);2)添加針對嵌入式監控系統硬件平臺的初始化及驅動代碼。
2.2.1 針對BF533的ucos-ii的代碼修改
由于BF533是基于MSA(微信號架構)的16位定點DSP,為了能與ucos-ii數據處理單位統一,需要在OS_CPU.H文件中設置BF533的數據單元長度。部分宏定義代碼如下:
typedefboolBOOLEAN;
typedefsignedcharINT8S;
typedefsignedshortintINT16S;
typedefsignedintINT32S;
另外在OS_CPU.H文件中還需設置幾個堆棧的參數如堆棧的增長方向、堆棧的操作單位等。BF533支持的是自頂向下的堆棧增長方式,即堆棧空間從高地址向低地址增長。單次堆棧操作單位是INT32U。最后在OS_CPU.H還要對三個函數進行宏定義:屏蔽所有中斷,恢復所有中斷,進行任務切換。這三個函數在ucos-ii中十分重要,前兩個是為了保證一些重要函數或任務運行中的數據不會被改變(即通常所說的代碼臨界段),第三個是用于ucos-ii的任務切換,在ucos-ii中要求任務的切換就好象是剛發生過一次中斷一樣。在本系統中首先假設申請切換的任務已經把相關的寄存器變量等參數保存,并將堆棧指針指向了優先級高的任務。這樣任務切換函數就只需要完成中斷返回操作。
開發軟件采用VisualDSP++,它的編譯器支持在C語言中嵌入匯編,因此我們把這個宏定義直接寫成了一條軟件中斷指令:raise14。這樣一旦系統進行任務切換,實際上引起了一個中斷操作,在OS_CPU_A.ASM文件中我們在此中斷操作中完成任務切換前的保存寄存器等工作,最后是一條中斷返回指令:RTS。這樣優先級更高的任務運行時就會好像剛從中斷返回一樣。
在文件OS_CPU_A.ASM中還需要編寫幾個匯編函數來實現ucos-ii的時鐘節拍、正常任務切換、中斷級任務切換、初始化任務堆棧等功能。
在ucos-ii中,我們可以把時鐘節拍TICKS比做是它的心臟節拍。TICKS為系統提供了一個時間基準并為各個任務提供了時間等待等服務。本系統使用BF533的核心定時器來完成系統時鐘節拍的功能。系統TICKS設定的是100mS。以下是部分初始化核心定時器的匯編代碼:
_CoreTimerInit:
p1.H=(TCNTL》》16);//設置時間控制寄存器
p1.L=(TCNTL&0xFFFF);
r3=1;
[p1]=r3;
p1.H=(TCOUNT》》16);//裝載計數值
p1.L=(TCOUNT&0xFFFF);
[p1]=r1;
p1.H=(TCNTL》》16);//開啟定時器
p1.L=(TCNTL&0xFFFF);
r1=0x07;
[p1]=r1;
_CoreTimerInit.end:
除增加上述功能函數外,在ucos-ii啟動代碼的程序中加入BF533的一些必須的初始化程序如CPU頻率的設定等,ucos-ii就可以在本系統上運行起來。
2.2.2 嵌入式監控系統在ucos-ii中的系統驅動程序添加
ucos-ii移植完成后,嵌入式系統要實現應有的功能還需要添加一些外圍電路的驅動程序如:網卡芯片LAN91C111的初始化程序,視頻A/D芯片的初始化程序等。由于Blackfin系列DSP支持存儲空間的DMA操作,為了充分發揮BF533的硬件優勢,本系統專門建立一個文件DMA_TRANS.C實現多個存儲空間的DMA操作的初始化配置,以方便各個任務實現其功能調用。以下就是實現網卡芯片DMA存儲操作的部分配置文件:
voidinit_dma(LAN91C111_DATA*d)
{dev=d;//為LAN91C11設置一個全局靜態變量,實現對它的數據訪問
SET_SHORT((dev-》DstStreamBaseAddr+OFFSET_CONFIG),(unsignedshort)0x0);
//對目標地址的配置清零
SET_SHORT((dev-》SrcStreamBaseAddr+OFFSET_CONFIG),(unsignedshort)0x0);
//對源地址的配置清零
dma_mask_en(1);//將SIC控制寄存器的相應DMA傳輸位置1。}
2.3 基于ucos-ii和監控系統的任務程序添加
在ucos-ii中系統的各個應用程序被當成是任務,每個任務被分配一個優先級,ucos-ii支持的最大任務數可在OS_CFG.H文件中指定。ucos-ii可以管理多達64個任務,并從中保留了四個最高優先級和四個最低優先級的任務供自己使用,所以用戶可以使用的只有56個任務。因為ucos-ii不支持相同優先級的任務,所以每建立一個任務就需要為任務分配一個優先級并建立一個獨立的堆棧空間。
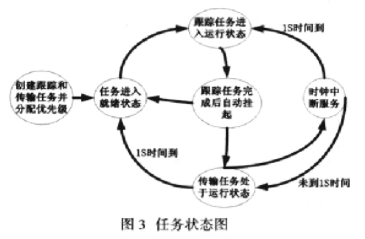
本智能監控系統主要實現對運動目標的跟蹤監控和將原始數字圖象轉化為BMP格式并向網絡發送現場圖片的功能。在ucos-ii中分配了兩個任務優先級0和1給對運動目標的跟蹤和網絡傳輸。之所以使網絡傳輸的任務優先級低于對運動目標跟蹤的任務,是因為考慮到網絡延時等因素會造成對運動目標跟蹤的實時性效果比較差,對圖像做二值化和差分等運算的時間不大于150mS以及攝像機云臺運動一次的時間大概是500mS。本系統在對運動目標跟蹤任務中采取的策略是:每當任務完成一次跟蹤,就使自己進入掛起狀態,直到每秒定時到后,在時鐘節拍中斷服務程序中喚醒該任務使之處于就緒狀態。任務的狀態圖如圖3:
3 結論
在ucos-ii的移植和系統應用程序的開發過程中,針對不同的CPU有不同的開發細節,在嵌入式監控系統中應注意以下幾點:
A移植過程中,對ucos-ii的堆棧的理解很重要,它的任務切換的實質就是利用堆棧的改變和軟件中斷來實現任務的跳轉。并且在系統的中斷服務程序中也要注意到這一點,采取適當的堆棧操作以使之滿足任務切換的條件。
B在ucos-ii上增加應用任務之前,最好是編寫幾個如串口發送之類的簡單任務來測試移植ucos-ii后系統的可靠性,然后在此基礎上逐漸添加一些復雜的任務。
C要分析好ucos-ii各個任務的功能與時間要求,特別是在以時間為任務運行條件的情況下,可以在時鐘中斷服務中創建任務。如果系統是應用在對時間不敏感的場合,可以使用ucos-ii自帶的郵箱功能,用一個運行中的任務在滿足一定條件下來喚醒另一個任務。
將ucos-ii應用在嵌入式智能視覺監控系統中后,經實際運行,該系統能良好完成預期的所有功能,對非高速的運動目標跟蹤效果良好,局域網的PC主機能收到較清晰的HalfD1分辨率、256灰度等級的現場BMP圖片。
責任編輯:gt
-
處理器
+關注
關注
68文章
19178瀏覽量
229200 -
dsp
+關注
關注
552文章
7962瀏覽量
348308 -
存儲器
+關注
關注
38文章
7455瀏覽量
163623
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論