 5G車路協同自動駕駛總體方案,譜寫智能網聯汽車發展的新篇章
5G車路協同自動駕駛總體方案,譜寫智能網聯汽車發展的新篇章
本文提出了一種5G車路協同自動駕駛解決方案,該方案主要依托5G移動通信、高精度定位技術、五維時空融合技術、邊緣計算、邊云協同等技術,實現邊緣平臺算力部署,構建“端-邊緣-云”分層架構,建立智能可靠車聯網通信、車輛的實時高精度定位、交通態勢感知、交通管控等技術體系,實現5G車路協同,全面提升車輛感知決策控制能力。當前,該方案已在武漢經開區智能網聯汽車與智慧道路自動駕駛示范區應用落地。
引言
隨著5G技術的不斷成熟與廣泛應用,一切依賴于5G的行業與應用,迎來了新的生機。5G+B(北斗)+AICDE技術的組合,服務于工業互聯網、智能電網等14個垂直行業,實現了超過100種應用場景和超過100個標桿示范的應用落地。5G時代,將是各類高新技術百花齊放、各顯神通的時代;5G的建設,勢必會帶來資源共享、合作共贏的新型生態。
自動駕駛,需解決四個方面的問題:看得見(定位、避障)、聽得著(決策、控制、執行)、講得出(路徑規劃、行車方式)、有大腦(邊緣計算)。5G車路協同自動駕駛,就是充分利用5G(高帶寬、低時延、高可靠性、海量互聯)、北斗(高精度定位、精細化導航、精準度授時)、V2X(人、車、路、網融合)等領域的優勢,強強聯手,互惠互利。
早期的車路協同,存在一定的局限性,比如過分強調車的能力、忽視交通領域的融合等,致使車路協同進展緩慢。在車聯網領域,網聯智能是未來車路協同的趨勢,特別是在融入5G技術后,5G車路協同成了新的方向。本文定位于5G車路協同下的自動駕駛研究,提出了一種5G車路協同自動駕駛應用解決方案,該方案已成功應用于武漢經開區智能網聯汽車與智慧道路自動駕駛示范區。
5G車路協同自動駕駛總體方案
武漢經開區示范區,是我國規模最大的開放道路示范區項目,其建設內容如表1所示。
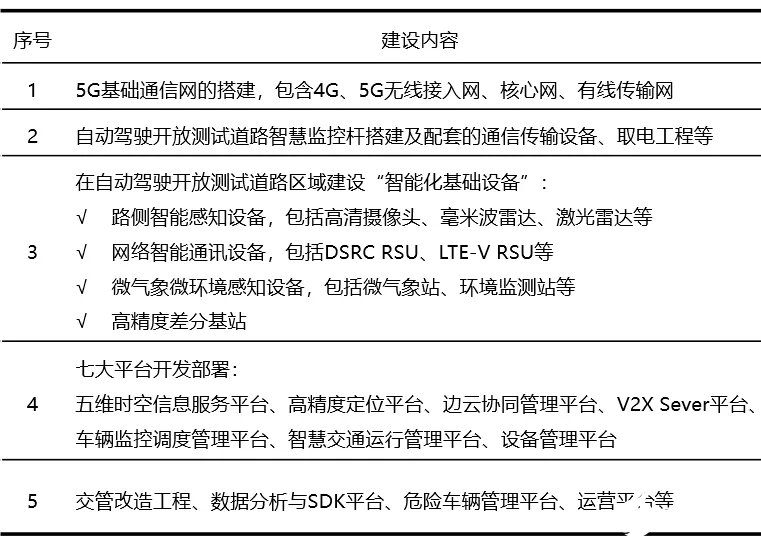
表1:武漢經開區示范區項目的整體建設內容
武漢經開區示范區項目,不僅示范道路長、場景多,更兼有國慶獻禮、保障武漢軍人運動會、帶動區域經濟、發展車都等多種使命。項目的總體架構圖如圖1所示。示范區的建設,主要包括3個部分:5G移動通信網絡、5G智慧道路、多領域融合的軟件平臺。
圖1:武漢經開區示范區項目的總體架構圖
5G智慧道路
3.1 智能全域感知道路
智能全域感知道路是一個集全域感知、信息交互、規劃決策等功能于一體的高新技術道路綜合體:
(1)在感知層面,通過道路基礎設施的更新,在路側布設智能設備,將道路標識、交通信號燈、可變信息交通標識牌、道路交通事故、道路施工等道路信息與天氣環境信息、車輛姿態信息、行人信息等實現數字網聯化,獲取連續時間空間的人-車-路-環境全域感知信息,為自動駕駛提供豐富全面的信息和決策依據。
(2)在信息交互方面,通過各種通信技術如V2X通信技術和網絡協議,實現傳感網、車聯網、光纖網絡和各種無線網絡之間的互聯互通,保證各類信息的有效傳輸,同時滿足極端條件網絡的穩定性和信息安全性。通過車內通信網、車際通信網和廣域通信網的整合互通,可以更有效地獲得人-車-路-環境信息數據,為數據的整合和分析提供了豐富的渠道。
(3)在規劃決策方面,通過邊緣計算、人工智能和大數據等技術,實現人-車-路-環境數據的存儲,信息挖掘和決策支持,提前感知提醒和規劃車輛的行車路徑和路權等級,實現對車流在時間和空間上的引導、分流,避免道路堵塞,實現道路交通安全態勢的前驅診斷、事故預警和主動干預,從而提高道路的交通通行能力和管理效率。
3.2 智能路側設備
圖2:智能路側設備示意圖
智能路側設備包括C-V2X RSU設備、路側感知設備、路側邊緣計算設備、路側氣象設備和路側道路環境監測設備等。
A、C-V2X RSU設備
RSU(Road Side Unit)為C-V2X技術的路邊單元,是車路協同系統的重要組成部分,也是突破車路協同技術的關鍵所在,其主要功能是采集當前的道路狀況、交通狀況等信息,通過通訊網絡,將信息傳遞至指揮中心或路側處理單元進行處理,并裁定相關信息通過網絡傳遞到有相應信息請求的車載終端,避免或減少交通事故,提升交通通行效率。
車載單元(OBU,On Board Unit)是指安裝在車輛終端的起拓寬駕駛員視野、增加駕駛員對行車環境和車輛運行狀態的感知、加強行車安全的單元。主要技術包括信息獲取、信息交互、事故隱患提示等。從各類傳感器和車載網絡獲取原始信息,并解算出典型車路協同應用需要的底層信息,通過信息交互傳遞至路側單元。其功能包括車輛運動狀態獲取、行車環境信息感知、車輛定位信息獲取、信息交互、信息處理及管理、安全報警與預警等。
B、路側感知設備
路側感知設備包括路側視頻設備、路側激光雷達、路側毫米波雷達等,具體描述如下:
(1)路側視頻設備:包括高清攝像機、槍型攝像、全景攝像機、視頻雷達一體機等,其中,高清攝像機可完成目標檢測功能,完成檢測數據封裝和發送功能,主要由智能攝像頭、終端服務器、外場工業交換機、光纖收發器、開關電源、防雷器等設備組成;槍型攝像機廣泛應用于城市道路監控,實現混行車道場景全目標的屬性識別和捕獲;全景攝像機可同時提供全景與特寫畫面,兼顧全景與細節,實現區域入侵、越界等行為的檢測等功能;視頻雷達一體機可以實現動態跟蹤和采集車輛、行人數據。
(2)路側毫米波雷達:對道路上行駛的車輛、行人、動物、拋灑物體進行實時跟蹤定位檢測并及時將所感知的路況信息、交通狀態信息、車輛實時信息分析匯總后通過車路協同通信設備與道路上行駛車輛、自動駕駛車輛或無人駕駛車輛進行數據交互,來滿足車輛實現全速智能駕駛的定位要求。
(3)路側激光雷達:通過路側激光雷達對道路的完整掃描,可以得到基于點云數據的道路動態環境4D重建,將道路信息,包括車輛、行人、非機動車及其它物體全部納入到V2X的數據網絡,再利用RSU向周邊或者更遠距離接近的車輛進行廣播,為解決智能網聯汽車的超遠視距和非視距信息感知提供有力支撐。
C、路側邊緣計算(MEC)設備
MEC需要具備多設備連接能力,接入RSU、OBU、智能化交通控制設施(交通信號燈、標志、標線、護欄等)、攝像頭、毫米波雷達、激光雷達、各類環境感知設備的信息,同時向上連接云平臺;MEC需要具備多傳感器融合處理能力,比如攝像頭+激光雷達+毫米波雷達融合分析算法;MEC還需要具備ITS相關協議處理能力,比如針對交叉路口防碰撞預警業務,在車輛經過交叉路口時,MEC通過對車輛位置、速度及軌跡分析研判,分析出可能存在的碰撞風險,通過RSU傳輸到車輛OBU,起到預警目的。
D、路側氣象設備
微氣象監測系統是一種集氣象數據采集、存儲、傳輸和管理于一體的無人值守的氣象采集系統。氣象監測系統由氣象傳感器、氣象數據采集儀和計算機氣象軟件三部分組成,可同時監測大氣溫度、大氣濕度、風速、風向、氣壓、雨量、能見度等氣象要素。
E、路側道路環境監測設備
道路環境監測系統是一種集數據采集、存儲、傳輸和管理于一體的無人值守的監測系統,由路面狀況傳感器、環境數據采集儀和通訊模塊等部分組成。可監測實時路面狀況;包括路面溫度、濕滑程度、積水厚度、覆冰厚度、積雪厚度等。
網聯汽車與智慧道路示范區軟件平臺
武漢經開區示范區項目的軟件平臺如下:
(1)5G邊云協同管理平臺
包括兩個部分:邊緣側的邊緣計算平臺、云端的邊云協同管理平臺。其中,邊緣計算平臺部分包含基礎設施搭建和應用開發、邊緣PaaS平臺開發以及邊緣應用;云端的邊云協同管理平臺包含邊云協同基礎設施管理、邊云協同PAAS管理、邊云協同大數據平臺和邊云協同智能管理平臺。
圖3:基于5G的邊云協同平臺架構圖
(2)五維時空信息服務管理平臺
獲取感知范圍內的環境數據,助力車路協同,為5G網聯智能駕駛提供可靠的指導信息,為智慧城市、智慧交通、智慧出行等智慧生活圈的提供高效低功耗的目標感知、事件預警等信息服務。五維時空平臺可作為智慧城市建設的基礎層,可以促進整個網聯智能駕駛體系發展和增強,用路側感知設備和邊緣云設備,使網聯汽車感知范圍半徑范圍擴大,可實時獲取大量實時路況信息,大大增強了單車感知能力和車路協同能力。總體感知能力的增強,提供車輛周圍環境信息,為車輛行駛安全增加了一層安全保障。
(3)基于5G+北斗的高精度定位平臺
基于邊云協同整體架構,邊緣節點RTK解算及多維置信模型,實現可擴展、分布式、高可用、高性能、跨平臺且容器化的GNSS定位平臺。平臺以北斗衛星導航系統為主,GPS等系統為輔,依托完善的運營服務機制、可靠的信息安全體系,提供全天候、全天時、高精度的定位、導航和授時服務,可在區域范圍內提供實時米級、亞米級精準定位服務,提供實時厘米級和后處理毫米級高精度服務,為車路協同自動駕駛提供實時厘米級的高精度位置服務。
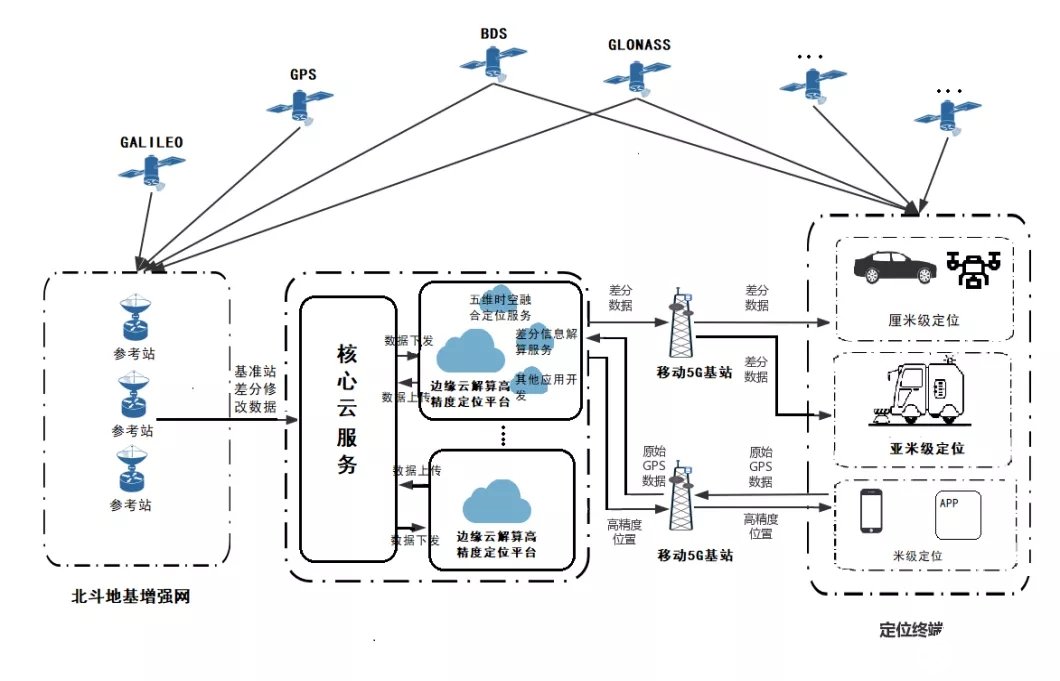
圖4:高精度定位平臺系統架構圖
(4)車輛監控調度管理平臺
通過與網聯車輛的交互,實現對網聯車輛的管理與控制,支撐網聯汽車的自動駕駛。車輛監控調度管理平臺為用戶提供車輛管理、信息查詢、車輛調度、監控管理、系統設置等功能,根據用戶權限展示可操作菜單項,實現對車輛信息查詢、車輛調度及監控等功能。
(5)智慧交通運行管理平臺
結合各地交通管理部門提出的各種業務訴求和自身的數據、業務、計算能力,通過整合移動互聯網信息以及各地交管部門的自身數據信息,處理海量移動互聯網數據融合傳統交通數據,完成對城市交通實時、歷史狀態的評估和診斷,發現交通問題,并輸出根據實時和歷史數據對未來道路交通狀況預測。
(6)V2X Server平臺
接入RSU和車載終端(車載后視鏡、OBU)/手機APP,匯聚路側端和車載端數據,為用戶提供V2X基礎數據服務,支撐車載終端/手機APP上的V2X應用;同時也支持與交警平臺、廠商TSP平臺、圖商平臺等平臺之間的對接,實現信息開放和共享。
圖5:V2X Server平臺整體架構圖
(7)設備管理平臺
主要圍繞設備的實時監測進行智能監管,對接各硬件接口或網管平臺,對接口數據進行脫敏、封裝、存儲處理。實現對路側設備分析、處理、展示、查詢、標記和定位。便于統籌管理所有路側設備,提供安全可靠信息。
(8)危險車輛管理平臺
主要通過事前行政審批、事中過程管控、事后閉環管理以及大數據展示來實現對城市道路危險運輸車輛進行智能化管控。
(9)運營平臺
用以滿足不同V2X的應用場景,各種應用場景之間相互交互形成一個閉環的生態系統,輔助車輛實現與一切可能影響它的實體實現信息交互,真正實現無人自動駕駛。同時,運營平臺可根據數據的匯集和數據匯總進行深度的挖掘,來展現車輛應用過程中出現的各種問題,為車輛技術的優化提供相應的技術支持方案,以及為車輛的運營提供商業模式的應用示范。
結束語
5G車路協同自動駕駛是依托信息通信技術,通過車內、車與車、車與路、車與人、車與服務平臺的全方位連接和數據交互,提供綜合信息服務,形成汽車、電子、信息通信、道路交通運輸等行業深度融合的新型產業形態,有利于推動智能交通,促進自動駕駛技術創新和應用,提高交通效率、減少污染、促進信息消費,對我國實施創新驅動發展、推進供給側結構性改革、建設制造強國、網絡強國和交通強國具有重大意義。未來的5G車路協同自動駕駛示范區,將推進智能網聯汽車與智慧交通、智慧城市融合發展,形成涵蓋下一代汽車研發設計、智能終端制造、智慧交通和智慧城市應用的完備產業體系,不斷填補智能網聯汽車發展的技術空白,譜寫智能網聯汽車發展的新篇章。
責任編輯:gt
-
5G
+關注
關注
1353文章
48367瀏覽量
563382 -
自動駕駛
+關注
關注
783文章
13684瀏覽量
166147 -
邊緣計算
+關注
關注
22文章
3064瀏覽量
48631
發布評論請先 登錄
相關推薦
復合機器人:開啟智能倉儲新篇章

自動駕駛的未來之路:智能網聯與單車智能的交融
智能網聯是否是自動駕駛落地的必要條件?
揭秘! 經緯恒潤“車路云一體化”方案研發服務背后的科技驅動力

FPGA在自動駕駛領域有哪些應用?
百度蘿卜快跑第六代無人車攜手禾賽AT128激光雷達,共筑自動駕駛新篇章
經緯恒潤打造智能網聯汽車“車路云一體化”解決方案,助力試點城市建設落地
駛向L3級自動駕駛:車路協同
深開鴻與哈工大重慶研究院合作共同開啟智能機器人與協同技術的新篇章

深開鴻與哈工大重慶研究院攜手打造智能機器人與協同技術新篇章






 工商網監
工商網監
評論