") 機(jī)器人也將擁有和人類(lèi)一樣的觸覺(jué)分析能力?
機(jī)器人也將擁有和人類(lèi)一樣的觸覺(jué)分析能力?
人類(lèi)善于利用手指觸覺(jué)來(lái)感知物體的物理特性(包括質(zhì)量、重心、轉(zhuǎn)動(dòng)慣量、表面摩擦等),從而完成高難度的控制任務(wù)。在不遠(yuǎn)的將來(lái),機(jī)器人也會(huì)擁有觸覺(jué)分析能力。在剛剛結(jié)束的機(jī)器人頂會(huì) IROS 2020 上,上海交大 & MIT 聯(lián)合項(xiàng)目 SwingBot 為我們展示了如何讓機(jī)器人通過(guò)觸覺(jué)傳感器來(lái)學(xué)習(xí)感知物體復(fù)雜的物理特性(tactile exploration),從而完成一個(gè)高難度的甩筆任務(wù)(in-hand object swing-up)。該工作也摘得此次大會(huì)的最佳論文獎(jiǎng)項(xiàng)。
IROS2020 最佳論文獎(jiǎng)項(xiàng)。來(lái)源 iros2020.org (http://iros2020.org/) 下圖為機(jī)器人觸覺(jué)分析的流程通過(guò)握著物體旋轉(zhuǎn)一定角度和抖動(dòng)物體來(lái)感知物理特性,從而推斷出最佳的控制策略實(shí)現(xiàn)甩筆。
該項(xiàng)目通過(guò)對(duì)多種觸覺(jué)探索動(dòng)作的信息融合,讓機(jī)器人端到端的去學(xué)習(xí)概括手中物體的物理特性,并依靠這個(gè)物理特征來(lái)實(shí)現(xiàn)高難度的手上控制任務(wù)(in-hand swing-up)。更多的詳細(xì)內(nèi)容可以訪問(wèn)論文原文和項(xiàng)目主頁(yè):
高精度、低成本的觸覺(jué)傳感器 研究人員使用的是一款名為 GelSight 的機(jī)器人觸覺(jué)傳感器,該傳感器也發(fā)明于此 MIT 項(xiàng)目組(指導(dǎo)教授:Edward Adelson)。區(qū)別于傳統(tǒng)觸覺(jué)傳感器依賴(lài)于稀疏的電極陣列(基于電阻 / 電容 ),GelSight 是一個(gè)基于光學(xué)的觸覺(jué)傳感器,通過(guò)一個(gè)微型相機(jī)來(lái)拍攝接觸面的三維幾何形變,可以返回高精度的觸覺(jué)信息(見(jiàn)下圖是 GelSight 重建的奧利奧餅干表面)。 更值得一提的是,因?yàn)橹恍枰粋€(gè)低成本的微型攝像頭和一個(gè)樹(shù)莓派控制器,GelSight 的制作總成本只有 100 美金(700 元),遠(yuǎn)低于市面上的其他觸覺(jué)傳感器。
GelSight 觸覺(jué)信息效果圖。來(lái)源:[2] 在本篇工作中,研究人員將 GelSight 安裝在了機(jī)器人二爪夾具的一側(cè),通過(guò)在傳感器上標(biāo)定靶點(diǎn)和重建三維信息,高密度的力學(xué)反饋可以以每秒60幀的速度實(shí)時(shí)傳輸出來(lái)。
基于多種觸覺(jué)探索動(dòng)作的物理特性分析能力 人類(lèi)可以通過(guò)多種觸覺(jué)探索動(dòng)作(觸摸、甩、掂量)來(lái)概括手上物體的物理特性(重量、光滑程度、重心位置等)[1],而且人類(lèi)并不需要測(cè)量這些物理參數(shù)的精確數(shù)值,而是用自己的經(jīng)驗(yàn)結(jié)合觸覺(jué)手感來(lái)實(shí)現(xiàn)對(duì)手中物體高難度的控制。 受這個(gè)觀察的啟發(fā),該項(xiàng)目的研究人員首先提出了一個(gè)多觸覺(jué)探索的信息融合模型(Information fusion model for multiple tactile exploration actions),該模型的目的是整合不同的機(jī)器人觸覺(jué)探索動(dòng)作信息到一個(gè)共同的物理特性特征空間(Physical embedding)中,從而實(shí)現(xiàn)對(duì)物體多種物理特性(質(zhì)量、重心位置、轉(zhuǎn)動(dòng)慣量和摩擦力)的概括能力。
多觸覺(jué)探索動(dòng)作的信息融合模型。來(lái)源:論文 研究人員為機(jī)器人設(shè)計(jì)了兩種基礎(chǔ)的探索動(dòng)作:(1)緊握物體并旋轉(zhuǎn)一定角度(in-hand tilting)和(2)放松緊握狀態(tài)并抖動(dòng)物體(in-hand shaking)。動(dòng)作(1)的觸覺(jué)反饋信息會(huì)通過(guò)一個(gè)卷積神經(jīng)網(wǎng)絡(luò)(CNN)來(lái)輸出一個(gè)一維的特征向量;動(dòng)作
(2)的抖動(dòng)因?yàn)槭菚r(shí)序信息,會(huì)用一個(gè)循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)來(lái)處理獲得相應(yīng)的特征。這兩個(gè)特征信息通過(guò)拼接和一個(gè)由若干多層感知器(MLP)組成的融合模型進(jìn)行整合,得到一個(gè)低維的物理特征概括(physical feature embedding)。 區(qū)別于逐個(gè)測(cè)量每種不同的物理特性,這種信息整合模型的一大優(yōu)勢(shì)是可以根據(jù)任務(wù)來(lái)自主調(diào)節(jié)對(duì)不同物理信息的關(guān)注程度,因?yàn)楹芏嗳蝿?wù)是無(wú)法明確分析出是哪一種物理特性起到了主導(dǎo)作用,而使用該方法可以讓機(jī)器人自主地學(xué)習(xí)并選擇需要的物理信息。此外,這兩個(gè)觸覺(jué)探索動(dòng)作加起來(lái)只需要 7 秒的時(shí)間,相比于用精密的儀器來(lái)逐個(gè)測(cè)量物體的質(zhì)量和摩擦力等,該方法的效率也有很大的提升,并且不需要額外的測(cè)量?jī)x器的輔助,更接近人類(lèi)的觸覺(jué)感知能力。 此外,為了讓機(jī)器人自主學(xué)習(xí)選擇最需要的物理信息,研究人員接著提出了一個(gè)控制預(yù)測(cè)模型,該模型通過(guò)輸入先前獲得的物理特征向量和機(jī)器人控制參數(shù),來(lái)預(yù)測(cè)最終物體會(huì)被甩到的角度。在訓(xùn)練過(guò)程中,整個(gè)流程是用一個(gè)端到端(end-to-end)的訓(xùn)練算法來(lái)實(shí)現(xiàn)的。研究人員設(shè)計(jì)了一個(gè)機(jī)器人自動(dòng)采集數(shù)據(jù)的系統(tǒng),并且 3D 打印了可以隨意調(diào)節(jié)物理特性的模型來(lái)采集數(shù)據(jù),具體如下兩個(gè)動(dòng)圖所示:
可變物理特性的模板物體。
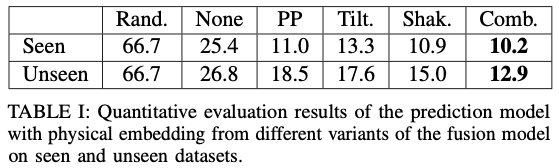
數(shù)據(jù)收集流程。 研究人員讓機(jī)器人自主采集了1350次甩筆的數(shù)據(jù),其中包含了27個(gè)不同物理特性的物體。在測(cè)試的時(shí)候,研究人員額外選擇了6個(gè)訓(xùn)練數(shù)據(jù)中不包含(unseen)的新物體,機(jī)器人需要通過(guò)觸覺(jué)探索模型來(lái)確定未知物體的物理特性,并根據(jù)任務(wù)要求的最終甩到的角度,來(lái)選擇一套成功率最高的控制參數(shù)。 實(shí)驗(yàn)成果 研究人員首先對(duì)比了使用和不使用多觸覺(jué)探索融合算法對(duì)預(yù)測(cè)控制模型準(zhǔn)確率的影響(數(shù)值越低,準(zhǔn)確度越高),其中融合算法(Comb.)在已知和未知物體上的預(yù)測(cè)誤差率都遠(yuǎn)低于不使用觸覺(jué)信息(None)。此外融合算法(Comb.)的表現(xiàn)也比單一使用一種觸覺(jué)探索動(dòng)作(Tilt.: tilting-only, Shak.:shaking-only)的算法效果好。
以下是機(jī)器人在測(cè)試過(guò)程中,通過(guò)使用多觸覺(jué)探索融合算法來(lái)實(shí)現(xiàn)對(duì)未知物體(unseen objects)的物理特性探索和上甩效果(swing-up)。第一個(gè)任務(wù)要求將物體上甩至相對(duì)于傳感器 90 度的角度位置:
第二個(gè)任務(wù)要求將物體上甩至相對(duì)于傳感器 180 度的位置:
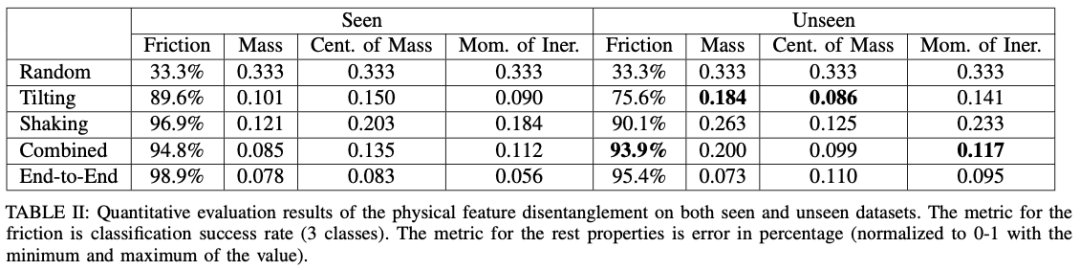
研究人員緊接著探索融合算法學(xué)習(xí)到的物理特征空間到底包含哪些信息。他們用一組額外的多層感知器來(lái)回歸(regression)每一個(gè)物理特性的具體參數(shù),并計(jì)算誤差百分比(數(shù)值越低,準(zhǔn)確度越高)。 如下表所示,可以發(fā)現(xiàn)第一個(gè)旋轉(zhuǎn)動(dòng)作(Tilting)對(duì)物體的質(zhì)量(Mass)、重心(Center of mass)和轉(zhuǎn)動(dòng)慣量(Moment of inertia)的信息捕捉更準(zhǔn)確。而第二個(gè)搖晃動(dòng)作(Shaking)對(duì)物體接觸部分的摩擦力(Friction)的把握更準(zhǔn)。將兩種探索動(dòng)作融合的算法(Combined)取得了最好的回歸準(zhǔn)確率。
最后研究人員進(jìn)一步探索所學(xué)習(xí)到的物理特征空間是如何能夠做到對(duì)未知物體依然適用的。他們可視化了6個(gè)未知物體的數(shù)據(jù)分布并展示在了下圖 (b) 中,其中 x 軸表示控制參數(shù),y 軸表示最終上甩的角度。在圖 (a) 中,研究人員用 PCA 提取了每個(gè)采樣中網(wǎng)絡(luò)輸出的物理特征向量的主成分(2 維)并可視化在這個(gè)二維點(diǎn)圖中。觀察可以發(fā)現(xiàn),如果兩個(gè)物體的控制策略相近(例如物體 5 和物體 6),他們的物理特征間距也會(huì)越近,而兩個(gè)物體的控制策略相差較大(例如物體 1 和物體 4),則在特征空間上的間距也會(huì)更大。
物理特征可視化。
原文標(biāo)題:機(jī)器人也能「甩筆」,擁有觸覺(jué)分析能力
文章出處:【微信公眾號(hào):中科院長(zhǎng)春光機(jī)所】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
責(zé)任編輯:haq
-
傳感器
+關(guān)注
關(guān)注
2548文章
50704瀏覽量
752084 -
機(jī)器人
+關(guān)注
關(guān)注
210文章
28216瀏覽量
206577 -
觸覺(jué)
+關(guān)注
關(guān)注
0文章
19瀏覽量
9456
原文標(biāo)題:機(jī)器人也能「甩筆」,擁有觸覺(jué)分析能力
文章出處:【微信號(hào):cas-ciomp,微信公眾號(hào):中科院長(zhǎng)春光機(jī)所】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
這批中國(guó)企業(yè),在做人形機(jī)器人觸覺(jué)傳感器
【書(shū)籍評(píng)測(cè)活動(dòng)NO.51】具身智能機(jī)器人系統(tǒng) | 了解AI的下一個(gè)浪潮!
機(jī)器人技術(shù)的發(fā)展趨勢(shì)
觸覺(jué)傳感器的發(fā)展,對(duì)機(jī)器人產(chǎn)業(yè)有什么影響?
解鎖機(jī)器人視覺(jué)與人工智能的潛力,從“盲人機(jī)器”改造成有視覺(jué)能力的機(jī)器人(上)

開(kāi)源項(xiàng)目!用ESP32做一個(gè)可愛(ài)的無(wú)用機(jī)器人
開(kāi)源項(xiàng)目!用ESP32做一個(gè)可愛(ài)的無(wú)用機(jī)器人
Al大模型機(jī)器人
錳芯磁環(huán)電感尺寸一樣性能也一樣嗎
其利天下技術(shù)·搭載無(wú)刷電機(jī)的掃地機(jī)器人的前景如何?
戴盟機(jī)器人發(fā)布Sparky 1:人形機(jī)器人兩大陣營(yíng)已現(xiàn),要能跑能跳還是要心靈手巧

工業(yè)機(jī)器人的觸覺(jué)傳感器有哪些?傳感器作用是什么?
新技術(shù)讓水下機(jī)器人擁有“觸覺(jué)”
人形機(jī)器人柔性觸覺(jué)傳感器的關(guān)鍵技術(shù)分析





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論